1.本发明属于海洋装备技术领域,涉及一种复合带传动的紧凑型水下航行器部件收放装置及方法。
背景技术:
2.近年来,随着海洋装备的不断发展,水下航行器的功能也越来越丰富。通过配备不同的工作部件,水下航行器可以实现多种功能。比如通过配备部件,令水下航行器具有了作业功能,从而大大扩展了rov、auv等水下航行器的工作能力与工作范围。对于具有巡航功能的水下航行器,为了降低航行阻力,一般要求其外形尽量接近流线型,此外也为了在航行过程中保护工作部件,因此在航行时一般将工作部件收在舱体内。只有当部件作业时再通过收放装置将工作部件伸出舱体进行作业。因此研究结构简单、稳定可靠、高效率、体积小的水下部件收放装置对提高水下航行器工作效率具有重要的作用。
3.收放装置一般常见于各种航行器。比如飞机起落架就是一种典型的收放装置。飞机起落架一般采用连杆机构来控制主轴在固定底座上的转动,轮胎位于该主轴的末端,该收放装置的最大伸出距离为主轴的长度,故伸出距离和所占空间成正比,不适用空间有限的水下航行器。
技术实现要素:
4.本发明针对水下航行器的部件收放问题,提供了一种利用复合带传动来实现水下航行器部件收放的紧凑型水下航行器部件收放装置及方法。
5.本发明解决其技术问题采用的技术方案是:
6.本发明复合带传动的紧凑型水下航行器部件收放装置,包括固定底座、动力装置、伸缩装置和安装基板。所述的动力装置由电机、主动齿轮和从动齿轮组成;电机的壳体固定在固定底座上,电机的输出端与主动齿轮固定;所述的从动齿轮与主动齿轮啮合;所述的伸缩装置由前端带轮传动组件、中间带轮传动组件和末端执行带轮传动组件组成;中间带轮传动组件设有若干个。所述的前端带轮传动组件包括前端主动带轮、前端主动轴、前端从动带轮、前端从动轴和前端连杆;所述的前端主动轴固定在固定底座上;所述的前端主动带轮固定在前端主动轴上;所述的从动齿轮与前端主动轴构成转动副;前端连杆一端与从动齿轮的端面固定;前端从动轴固定在前端连杆另一端;所述的前端从动带轮与前端从动轴构成转动副,并与前端主动带轮通过同步带连接。所述的中间带轮传动组件包括中间从动带轮、中间主动带轮、中间连杆和传动轴;所述的传动轴固定在中间连杆后端;所述的中间从动带轮与传动轴构成转动副,并与中间主动带轮通过同步带连接。所述的末端执行带轮传动组件包括末端主动带轮、末端从动轴、末端从动带轮和末端连杆;所述的末端从动轴固定在末端连杆后端;所述的末端主动带轮与末端从动轴构成转动副,并与末端主动带轮通过同步带连接;所述的安装基板与末端从动带轮固定。
7.若中间带轮传动组件只有一个,则中间带轮传动组件与前端带轮传动组件和末端
执行带轮传动组件的装配关系如下:中间主动带轮固定在前端从动轴上;中间连杆的前端套置在前端从动轴上,并与前端从动带轮固定;末端主动带轮固定在传动轴上;末端连杆的前端套置在传动轴上,并与中间从动带轮固定;若中间带轮传动组件有n个,n≥2,则第一级中间带轮传动组件与前端带轮传动组件的装配关系如下:中间主动带轮固定在前端从动轴上;中间连杆的前端套置在前端从动轴上,并与前端从动带轮固定;第k级中间带轮传动组件与第k
‑
1级中间带轮传动组件的装配关系如下,2≤k≤n:第k级中间带轮传动组件的中间主动带轮固定在第k
‑
1级中间带轮传动组件的传动轴上;第k级中间带轮传动组件的中间连杆前端套置在第k
‑
1级中间带轮传动组件的传动轴上,并与第k
‑
1级中间带轮传动组件的中间从动带轮固定;最后一级中间带轮传动组件与末端执行带轮传动组件的装配关系如下:末端主动带轮固定在最后一级中间带轮传动组件的传动轴上;末端连杆的前端套置在最后一级中间带轮传动组件的传动轴上,并与最后一级中间带轮传动组件的中间从动带轮固定。
8.优选地,所述的固定底座包括底板、立板和限位杆;立板固定在底板上;所述的前端主动轴与立板固定;所述的限位杆位于前端主动带轮一侧,并与底板固定。
9.优选地,所述前端主动带轮的直径为2d,前端从动带轮的直径为d,前端从动带轮与前端主动带轮的中心距为l;中间主动带轮和中间从动带轮的直径均为d,中心距为l;末端主动带轮的直径为d,末端从动带轮的直径为2d,末端主动带轮和末端从动带轮的中心距为l;所述的安装基板包括一体成型的尾部杆和前部面板;所述的尾部杆与末端从动带轮固定;前部面板的几何中心与末端从动带轮的中心距为l,且前部面板的几何中心与末端主动带轮的几何中心重合状态下,前部面板沿尾部杆杆长方向超出末端主动带轮几何中心的尺寸为d。
10.优选地,所述的安装基板为矩形或l形。
11.该复合带传动的紧凑型水下航行器部件收放装置的收放方法,具体步骤如下:
12.步骤一:将固定底座固定在水下航行器上;初始状态下,前端连杆、中间连杆、末端连杆和安装基板的尾部杆均处于水平状态,使得前端带轮传动组件、中间带轮传动组件、末端执行带轮传动组件和安装基板收缩在水下航行器的内仓中。
13.步骤二:当水下航行器部件需要开始工作时,电机带动主动齿轮转动,从动齿轮与主动齿轮啮合带动前端带轮传动组件的前端连杆正向转动角度α,由于前端主动带轮固定不动,前端带轮传动组件的同步带随前端连杆转动过程中带动前端从动带轮反向转动角度2α;若中间带轮传动组件只有一个,前端从动带轮转动带动中间带轮传动组件的中间连杆反向转动角度2α,由于中间带轮传动组件的中间主动带轮相对前端连杆不动,中间带轮传动组件的同步带随中间连杆转动过程中带动中间从动带轮正向转动角度2α;中间从动带轮带动末端执行带轮传动组件的末端连杆正向转动角度2α,由于末端主动带轮相对中间连杆固定不动,末端执行带轮传动组件的同步带随末端连杆转动过程中带动末端从动带轮和安装基板反向转动角度α;若中间带轮传动组件设有n个,前端从动带轮转动带动第一级中间带轮传动组件的中间连杆,第一级中间带轮传动组件的同步带带动第一级中间带轮传动组件的中间从动带轮正向转动角度2α;第k级中间带轮传动组件与第k
‑
1级中间带轮传动组件的传动如下,2≤k≤n:第k
‑
1级中间带轮传动组件的中间从动带轮带动第k级中间带轮传动组件的中间连杆,使得第k级中间带轮传动组件的同步带带动第k级中间带轮传动组件的中
间从动带轮转动角度2α;最后一级中间带轮传动组件的中间从动带轮带动末端执行带轮传动组件的末端连杆转动角度2α,末端执行带轮传动组件的同步带带动末端从动带轮和安装基板转动角度α。
14.步骤三:当水下航行器部件工作完成需要收回水下航行器的内仓时,电机经主动齿轮和从动齿轮带动前端带轮传动组件的前端连杆反向转动角度α,前端带轮传动组件再经中间带轮传动组件带动末端执行带轮传动组件和安装基板,使得前端带轮传动组件、中间带轮传动组件、末端执行带轮传动组件和安装基板收缩在水下航行器的内仓中。
15.优选地,n为偶数,安装基板相对末端执行带轮传动组件的末端连杆转动方向与前端连杆的转动方向相同,且在伸缩装置伸展的整个过程中,安装基板的姿态始终保持水平;完全展开状态下,安装基板的最大纵向平移距离为(n+2)l。
16.优选地,α=90
°
。
17.本发明具有的有益效果是:
18.1、节省空间,本发明水下航行器部件收放装置在初始状态时,所有部件折叠在一起,此时整个装置占用的空间最小,有利于水下设备的空间布局。
19.2、收放稳定,无论在本发明部件伸出还是收回时,末端的安装基板始终保持水平状态,不会发生翻转,保证部件的稳定性。
20.3、设计使用灵活可调,本发明由于伸缩装置是由多组带轮组件构成,设计时可通过实际需要以及水下航行器内仓收纳空间大小增减带轮组件的数量,从而改变最大可伸长距离。
附图说明
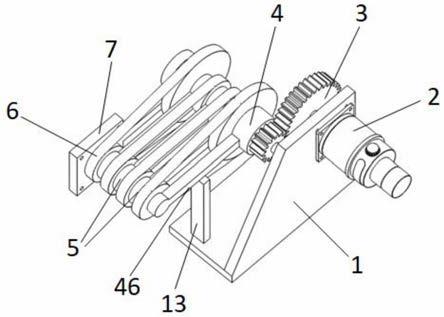
21.图1是本发明水下航行器部件收放装置在完全收缩状态下的机构立体图;
22.图2是本发明水下航行器部件收放装置在完全收缩状态下的机构剖视图;
23.图3是本发明水下航行器部件收放装置在完全伸展状态下的机构剖视图;
24.图4是本发明水下航行器部件收放装置在完全伸展状态下的机构侧部视图;
25.图5是本发明中前端主动带轮和前端主动轴与固定底座的装配示意图;
26.图6是本发明中从动齿轮与前端带轮传动组件的装配示意图;
27.图7是本发明的中间带轮传动组件结构示意图;
28.图8是本发明中末端执行带轮传动组件与安装基板的装配示意图;
29.图9是本发明的传动原理图。
30.图中的附图标记为:1.固定底座;2.电机;3.主动齿轮;4.前端带轮传动组件;5.中间带轮传动组件;6.末端执行带轮传动组件;7.安装基板;11.底板;12.立板;13.限位杆;41.从动齿轮;42.前端主动带轮;43.前端主动轴;44.前端从动带轮;45.前端从动轴;46.前端连杆;51.中间从动带轮;52.中间主动带轮;53.中间连杆;54.传动轴;61.末端主动带轮;62.末端从动带轮;63.末端连杆。
具体实施方式
31.以下结合附图对本发明作进一步说明。
32.如图1、2、3、4和6所示,复合带传动的紧凑型水下航行器部件收放装置,包括固定
底座、动力装置、伸缩装置和安装基板7。
33.动力装置由电机2、主动齿轮3和从动齿轮41组成;电机2的壳体固定在固定底座1上,电机2的输出端与主动齿轮3固定;从动齿轮41与主动齿轮3啮合;
34.伸缩装置由前端带轮传动组件4、中间带轮传动组件5和末端执行带轮传动组件6组成;中间带轮传动组件5设有若干个。
35.如图3、4、5和6所示,前端带轮传动组件4包括前端主动带轮42、前端主动轴43、前端从动带轮44、前端从动轴45和前端连杆46;前端主动轴43固定在固定底座1上;前端主动带轮42固定在前端主动轴43上;从动齿轮41与前端主动轴43构成转动副;前端连杆46一端与从动齿轮41的端面固定;前端从动轴45固定在前端连杆46另一端;前端从动带轮44与前端从动轴45构成转动副,并与前端主动带轮42通过同步带连接。
36.如图7所示,中间带轮传动组件5包括中间从动带轮51、中间主动带轮52、中间连杆53和传动轴54;传动轴54固定在中间连杆53后端;中间从动带轮51与传动轴54构成转动副,并与中间主动带轮52通过同步带连接。
37.如图8所示,末端执行带轮传动组件6包括末端主动带轮61、末端从动轴、末端从动带轮62和末端连杆63;末端从动轴固定在末端连杆63后端;末端主动带轮61与末端从动轴构成转动副,并与末端主动带轮61通过同步带连接;安装基板7与末端从动带轮62固定。
38.如图1、2、3、4、6和7所示,若中间带轮传动组件5只有一个,则中间带轮传动组件5与前端带轮传动组件4和末端执行带轮传动组件6的装配关系如下:中间主动带轮52固定在前端从动轴45上;中间连杆53的前端套置在前端从动轴45上,并与前端从动带轮44固定;末端主动带轮61固定在传动轴54上;末端连杆63的前端套置在传动轴54上,并与中间从动带轮51固定。
39.若中间带轮传动组件5有n个,n≥2,则第一级中间带轮传动组件5与前端带轮传动组件4的装配关系如下:中间主动带轮52固定在前端从动轴45上;中间连杆53的前端套置在前端从动轴45上,并与前端从动带轮44固定;第k级中间带轮传动组件5与第k
‑
1级中间带轮传动组件5的装配关系如下,2≤k≤n:第k级中间带轮传动组件5的中间主动带轮52固定在第k
‑
1级中间带轮传动组件5的传动轴54上;第k级中间带轮传动组件5的中间连杆53前端套置在第k
‑
1级中间带轮传动组件5的传动轴54上,并与第k
‑
1级中间带轮传动组件5的中间从动带轮51固定;最后一级中间带轮传动组件5与末端执行带轮传动组件6的装配关系如下:末端主动带轮61固定在最后一级中间带轮传动组件5的传动轴54上;末端连杆63的前端套置在最后一级中间带轮传动组件5的传动轴54上,并与最后一级中间带轮传动组件5的中间从动带轮51固定。
40.作为一个优选实施例,如图5所示,固定底座1包括底板11、立板12和限位杆13;立板12固定在底板11上;前端主动轴43与立板12固定;限位杆13位于前端主动带轮42一侧,并与底板11固定,用于限制前端带轮传动组件4的前端连杆46位置,确保其在完全收缩状态时处于水平位置。
41.作为一个优选实施例,前端主动带轮42的直径为2d,前端从动带轮44的直径为d,前端从动带轮44与前端主动带轮42的中心距为l;中间主动带轮52和中间从动带轮51的直径均为d,中心距为l;末端主动带轮61的直径为d,末端从动带轮62的直径为2d,末端主动带轮61和末端从动带轮62的中心距为l;安装基板7包括一体成型的尾部杆和前部面板;尾部
杆与末端从动带轮62固定;前部面板的几何中心与末端从动带轮62的中心距为l,且前部面板的几何中心与末端主动带轮61的几何中心重合状态下,前部面板沿尾部杆杆长方向超出末端主动带轮61几何中心的尺寸为d。
42.作为一个优选实施例,安装基板7为矩形或l形,视水下航行器的布置要求而定。
43.该复合带传动的紧凑型水下航行器部件收放装置的收放方法,具体步骤如下:
44.步骤一:将固定底座1固定在水下航行器上;初始状态下,前端连杆46、中间连杆53、末端连杆63和安装基板7的尾部杆均处于水平状态(优选地,前端连杆46由固定底座1上的限位杆13限位,从而保持前端连杆46、中间连杆53和末端连杆63的水平状态),使得前端带轮传动组件4、中间带轮传动组件5、末端执行带轮传动组件6和安装基板7收缩在水下航行器的内仓中,如图1和图2所示。此时,伸缩装置所占横向空间仅为l+2d,所占纵向空间为2d,占用的空间十分小,有利于水下航行器内部的空间布局。
45.步骤二:当水下航行器部件需要开始工作时,电机2带动主动齿轮3转动,从动齿轮41与主动齿轮3啮合带动前端带轮传动组件4的前端连杆46正向转动角度α,由于前端主动带轮42固定不动,前端带轮传动组件4的同步带随前端连杆46转动过程中带动前端从动带轮44反向转动角度2α(前端主动带轮42的直径是前端从动带轮44直径的2倍);若中间带轮传动组件5只有一个,前端从动带轮44转动带动中间带轮传动组件5的中间连杆53反向转动角度2α,由于中间带轮传动组件5的中间主动带轮52相对前端连杆46不动,中间带轮传动组件5的同步带随中间连杆53转动过程中带动中间从动带轮51正向转动角度2α(中间主动带轮52和中间从动带轮51的直径相等);中间从动带轮51带动末端执行带轮传动组件6的末端连杆63正向转动角度2α,由于末端主动带轮61相对中间连杆53固定不动,末端执行带轮传动组件6的同步带随末端连杆63转动过程中带动末端从动带轮62和安装基板7反向转动角度α(末端从动带轮62的直径是末端主动带轮61直径的2倍);若中间带轮传动组件5设有n个,前端从动带轮44转动带动第一级中间带轮传动组件5的中间连杆53,第一级中间带轮传动组件5的同步带带动第一级中间带轮传动组件5的中间从动带轮51正向转动角度2α;第k级中间带轮传动组件5与第k
‑
1级中间带轮传动组件5的传动如下,2≤k≤n:第k
‑
1级中间带轮传动组件5的中间从动带轮51带动第k级中间带轮传动组件5的中间连杆53,使得第k级中间带轮传动组件5的同步带带动第k级中间带轮传动组件5的中间从动带轮51转动角度2α;最后一级中间带轮传动组件5的中间从动带轮51带动末端执行带轮传动组件6的末端连杆63转动角度2α,末端执行带轮传动组件6的同步带带动末端从动带轮62和安装基板7转动角度α,如图9所示。
46.步骤三:当水下航行器部件工作完成需要收回水下航行器的内仓时,电机2经主动齿轮3和从动齿轮41带动前端带轮传动组件4的前端连杆46反向转动角度α,前端带轮传动组件4再经中间带轮传动组件5带动末端执行带轮传动组件6和安装基板7,使得前端带轮传动组件4、中间带轮传动组件5、末端执行带轮传动组件6和安装基板7收缩在水下航行器的内仓中,如图1所示。
47.作为一个优选实施例,n为偶数,安装基板7相对末端执行带轮传动组件6的末端连杆63转动方向与前端连杆46的转动方向相同,且在伸缩装置伸展的整个过程中,安装基板7相对水平面的转角始终为0,即安装基板7的姿态始终保持水平,只做纵向平移,保证部件在收放过程中的稳定性;完全展开状态下,安装基板7的最大纵向平移距离为(n+2)l,使水下
航行器部件达到伸出舱外的最大限度。
48.作为一个优选实施例,α=90
°
,即完全展开状态下,前端连杆46、中间连杆53和末端连杆63均与水平面呈90
°
,如图4所示。