1.本实用新型属于袜子加工技术领域,具体是一种袜子加工用翻袜装置。
背景技术:
2.袜子是一种穿在脚上的服饰用品;袜子的种类很多,按袜筒的长度分,有长筒袜、中筒袜和短筒袜和船袜;按袜口种类分,有户口袜、罗口袜和橡口袜;按使用对象分,有男袜、女袜和童袜;圆袜由袜口、袜筒和袜脚三部分组成;
3.在对袜子进行加工处理时,通常会需要借助到裁剪机、缝合机、传动带以及翻袜机等结构,传统的翻袜机在使用时需要人工手动将袜体套装到套管上,而后进行后续的翻袜处理;
4.在具体进行翻袜处理时会出现如下技术问题:在进行手动翻袜处理时,需要将袜口套装到对应的套管内,在此过程中常常会出现工作人员因为操作失误,使得袜口被撑开的角度过大的情况,同时人工进行翻袜处理需要一个一个进行处理,从而造成在进行翻袜处理时,整个的工作效率较低。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本实用新型提供了一种袜子加工用翻袜装置,解决现有背景技术中提到的的问题。
7.(二)技术方案
8.为实现以上目的,本实用新型通过以下技术方案予以实现:
9.一种袜子加工用翻袜装置,包括:底座,其底端焊接有用于支撑的底架,且底座的上表面安装有控制箱,该控制箱前侧配套的控制组件用于操控整个翻袜装置,所述控制箱的一侧装配有吸料管道,且吸料管道表面安装有真空发生器;
10.传送带,其分布于底座表面位于控制箱另一侧的位置处,并在控制箱的另一侧设置若干与吸料管道连通的套管,所述传送带的带体表面均匀设置有若干用于定位袜口的定位件,所述套管端口处翻转式装配撑板,且撑板的一端与定位件磁吸式连接;以及
11.推料机构,其包含连接板、安装到连接板一侧的若干伸缩气缸以及装配到伸缩气缸输出端上的推杆,所述推料机构与控制箱之间通过设置架板连接,且推料机构的推杆与套管管口相互对应。
12.进一步的,所述真空发生器用于抽取吸料管道内的空气,且真空发生器的吸气口一端与吸料管道内腔连通。
13.进一步的,所述套管的端口上安装有微型电机,且微型电机的输出轴与撑板的一端连接,所述撑板的上表面设置有若干辊体,该处的辊体是防止袜体在移动过程中受到到撑板的阻挡。
14.进一步的,所述撑板的中部设有至少两个转折端,具体的转折端为两个,方便与定
位件组成时,完成对袜口的撑开处理,且撑板的外表面电镀有磁吸层,该磁吸层与定位件的表面磁吸式连接。
15.进一步的,所述定位件的截面呈“l”形,且定位件与传送带带体表面之间形成的区域用于夹装袜口;所述伸缩气缸和推杆分布于连接板的两侧,所述推杆由柱杆和推头焊接而成,且柱杆的一端与伸缩气缸配套的活塞杆螺旋式连接。
16.(三)有益效果
17.一是,通过在套管端口上设置撑板,将其与传动带上的定位件结合后,利用微型电机带动整个撑板进行上下偏转,完成对定位件上袜口的撑开处理,在传送带的传送作用下,可确保袜体套装到套管上,实现批量化作业的同时,避免人手工拉动袜口时,由于袜口撑开角度过大,而影响整个袜体的质量;
18.二是,通过在控制箱一侧设置吸料管道,并将真空发生器和推料机构结合使用,推料机构可完成将袜体翻转后送入套管内的处理,而后利用真空发生器产生的真空吸附力,可确保套管内的袜体从吸料管道排出,解决了传统进行手动翻袜时效率较低的问题。
附图说明
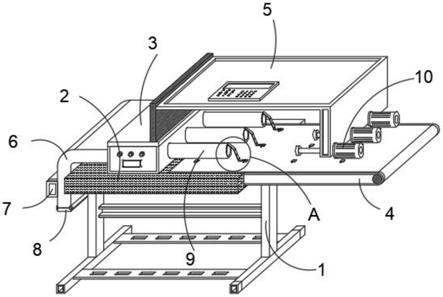
19.图1是本实用新型的整体结构示意图;
20.图2是本实用新型的吸料管道结构示意图;
21.图3是本实用新型的推料机构结构示意图;
22.图4是本实用新型的图1局部结构a的放大图。
23.附图标记:1、底架;2、底座;3、控制箱;4、传送带;5、架板;6、吸料管道;61、连接口;7、真空发生器;8、电控阀板;9、套管;10、推料机构;101、连接板;102、伸缩气缸;103、推杆;11、撑板;12、定位件;13、微型电机。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。此外,下文为了描述方便,所引用的“上”、“下”、“左”、“右”等于附图本身的上、下、左、右等方向一致,下文中的“第一”、“第二”等为描述上加以区分,并没有其他特殊含义。
25.实施例1:
26.本实施例给出的真空发生器和推料机构的具体结构,如图1和2所示,
27.底座2,其底端焊接有用于支撑的底架1,且底座2的上表面安装有控制箱3,该控制箱3前侧配套的控制组件用于操控整个翻袜装置,控制箱3的一侧装配有吸料管道6,且吸料管道6表面安装有真空发生器7,
28.开启真空发生器7时,电控阀板8处于关闭状态,在工作一段时间后,位于套管9内的袜体在真空吸附力的作用下完全进入到吸料管道6,此时再开启电控阀板8后,使得袜体从吸料管道6的出料口排出;
29.推料机构10,其包含连接板101、安装到连接板101一侧的若干伸缩气缸102以及装
配到伸缩气缸102输出端上的推杆103,推料机构10与控制箱3之间通过设置架板5连接,该处架板5可对部分传送带5上的袜体起到防护作用,且推料机构10的推杆103与套管9管口相互对应,使得推杆103能够完全进入套管9的管口内。
30.具体如图2所示,吸料管道6的截面呈“l”形,且吸料管道6的一端通过设置连接口61与控制箱3表面连接,另一端装配有用于封闭吸料管道6出料口的电控阀板8,该处的电控阀板8和真空发生器7均受到控制箱3的控制作用。
31.具体如图1和2所示,真空发生器7用于抽取吸料管道6内的空气,且真空发生器7的吸气口一端与吸料管道6内腔连通,在真空发生器7开启后,吸料管道6内的空气被抽取,此时吸料管道6和套管9内均产生负压力,使得位于套管9内翻转后的袜体得以进入到吸料管道6中。
32.具体如图1和3所示,伸缩气缸102和推杆103分布于连接板101的两侧,推杆103由柱杆和推头焊接而成,且柱杆的一端与伸缩气缸102配套的活塞杆螺旋式连接;
33.由于各个定位件12呈等间距式分布,当待翻的袜子移动到撑板11底端时,撑板11的底端与对应的定位件12接触,在撑板11与定位件12磁性吸附的过程中,撑板11的一端可插入到袜口内;
34.在传送带4移动的过程中,撑板11在微型电机13的带动下向上翻转,完成对袜口的开启处理后,袜体移动套装到套管9后,控制箱3上的控制面板带动推料机构10开启,而后伸缩气缸102带动推板103平移,使得袜体进入到套管9内即可。
35.通过采用上述技术方案:
36.在控制箱3一侧设置吸料管道6,并将真空发生器7和推料机构10结合使用,推料机构10可完成将袜体翻转后送入套管9内的处理,而后利用真空发生器7产生的真空吸附力,可确保套管9内的袜体从吸料管道6排出,解决了传统进行手动翻袜时效率较低的问题。
37.实施例2:
38.本实施例给出撑板及其配套组件的具体结构,如图1和4所示,
39.传送带4,其分布于底座2表面位于控制箱3另一侧的位置处,并在控制箱3的另一侧设置若干与吸料管道6连通的套管9,传送带4的带体表面均匀设置有若干用于定位袜口的定位件12,套管9端口处翻转式装配撑板11,且撑板11的一端与定位件12磁吸式连接。
40.当袜体与撑板11接触的过程中,由于撑板11表面设置有辊体,可防止袜体挂装到撑板11上;
41.具体如图1和3所示,传送带4始终位于各个套管9的正下方,在同一平面上,传送带4和套管9呈平行式分布,且传送带4与套管9之间的间距为1-2cm。
42.具体如图4所示,套管9的端口上安装有微型电机13,且微型电机13的输出轴与撑板11的一端连接,撑板11的上表面设置有若干辊体。
43.具体如图4所示,撑板11的中部设有至少两个转折端,具体为两个转折端,且撑板11的外表面电镀有磁吸层,该磁吸层与定位件12的表面磁吸式连接。
44.具体如图1和4所示,定位件12的截面呈“l”形,且定位件12与传送带4带体表面之间形成的区域用于夹装袜口。
45.通过采用上述技术方案:
46.在套管9端口上设置撑板11,将其与传动带4上的定位件12结合后,利用微型电机
13带动整个撑板11进行上下偏转,完成对定位件12上袜口的撑开处理,在传送带4的传送作用下,可确保袜体套装到套管9上,实现批量化作业的同时,避免人手工拉动袜口时,由于袜口撑开角度过大,而影响整个袜体的质量。
47.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。