1.本技术涉及防护用品的技术领域,尤其是涉及一种聚氨酯触点手套。
背景技术:
2.手套是一种用于手部保暖或者劳动保护的防护用品,其按照制造方法可以分为缝制手套、针织手套以及浸胶手套。其中,针织手套的制造工艺具体如下:首先用各种纺织纤维纯纺或混纺纱线并在手套机上编织得到手套半成品;随后将手套半成品进行拉绒、缩绒以及热定形整理,便可以得到针织手套。
3.针对上述中的相关技术,发明人认为,当需要对光滑产品进行加工时,由于光滑产品的表面摩擦系数较小,使得当操作人员通过针织手套对光滑产品进行控制时,光滑产品很容易与针织手套发生相对滑移,使得上述针织手套存在难以稳定控制光滑产品的缺陷。
技术实现要素:
4.为了更为稳定的对光滑产品进行控制,本技术提供一种聚氨酯触点手套。
5.本技术提供的一种聚氨酯触点手套采用如下的技术方案:
6.一种聚氨酯触点手套,包括手套主体以及若干设置于手套主体的手掌面的弹性触点,且若干所述弹性触点均匀间隔设置。
7.通过采用上述技术方案,由于弹性触点的设置,使得当操作人员通过聚氨酯触点手套对光滑产品进行控制时,若干个弹性触点可以同时与光滑产品抵接,并通过对弹性触点的挤压提高手套主体与光滑产品之间的摩擦力,进而有效提高对光滑产品的控制稳定性。
8.可选的,还包括设置于手套主体的开口处的锁定组件,所述锁定组件包括第一连接带、第二连接带以及锁定件,所述第一连接带以及第二连接带分别设置于手套主体的开口处的两侧,而所述锁定件设置于第一连接带远离手套主体的一端,且所述锁定件将第一连接带与第二连接带进行固定。
9.通过采用上述技术方案,由于锁定组件的设置,使得当操作人员通过聚氨酯触点手套对光滑产品进行控制时,第一连接带以及第二连接带可以通过锁定件形成小于操作人员的手掌宽度的闭环,进而使得锁定组件可以对操作人员的手掌进行限位,有效减少操作人员的手掌与聚氨酯触点手套脱离的可能性,间接提高对光滑产品的控制稳定性。
10.可选的,所述锁定件包括设置于第一连接带远离手套主体的一端的底座以及转动连接于底座上的锁定架,所述锁定架包括限位片以及设置于限位片靠近底座的一侧的锁定片,所述限位片与底座之间形成有供第二连接带穿设的锁定槽,所述锁定片容置于锁定槽内,且所述锁定片远离限位片的一端插入第二连接带内。
11.通过采用上述技术方案,由于锁定架以及底座的设置,且锁定架与底座转动连接,使得当不同操作人员佩戴聚氨酯触点手套时,可以根据第二连接带穿设锁定槽的长度来改变锁定组件形成的闭环的大小,进而促使锁定组件可以对不同操作人员的手掌进行限位,
有效提高聚氨酯触点手套的实用性。
12.可选的,所述锁定件还包括设置于底座的两侧的转动部,所述转动部包括设置于底座上的连接片以及转动连接于连接片上的定位螺栓,且所述定位螺栓的柱部穿设连接片并与限位片的侧壁可拆卸连接。
13.通过采用上述技术方案,由于定位螺栓以及连接片的设置,使得在保证锁定架与底座进行稳定的转动的同时,还可以在锁定架出现破损时更为简单方便的对锁定架进行更换,间接延长锁定组件的使用寿命。
14.可选的,所述连接片的内壁设置有若干球头柱塞,而所述限位片的侧壁开设有若干定位槽,所述球头柱塞活动插接于定位槽内。
15.通过采用上述技术方案,由于球头柱塞以及定位槽的设置,使得当锁定片对第二连接带进行锁定时,球头柱塞可以通过定位槽的槽壁限制限位片的旋转,进而有效减少锁定片与第二连接带发生脱离的可能性,间接提高锁定架对第一连接带以及第二连接带的限位稳定性。
16.可选的,所述限位片的两侧设置有抵接片,且所述抵接片靠近手套主体的一侧与底座远离手套主体的一侧抵接。
17.通过采用上述技术方案,由于抵接片的设置,使得当第二连接带向远离第一连接带的方向滑移时,底座通过抵接片对限位片进行限位,进而减少锁定片在第二连接带的带动下发生旋转的可能性,有效提高锁定架对第一连接带以及第二连接带的限位稳定性。
18.可选的,所述抵接片远离限位片的一侧设置有控制片,且所述控制片与底座之间形成有供操作人员的手指插入的控制槽。
19.通过采用上述技术方案,由于控制片以及控制槽的设置,使得当需要将聚氨酯触点手套进行脱离时,控制片以及控制槽给予操作人员一个握持的点,进而促使操作人员可以更为简单的通过限位片迫使锁定片脱离锁定槽,间接降低分离第一连接带与第二连接带的操作难度。
20.可选的,所述限位片与锁定片呈垂直设置。
21.通过采用上述技术方案,由于限位片与锁定片呈垂直设置,使得当第一连接带以及第二连接带通过锁定件进行固定时,锁定片对第二连接带的锁定力可以完全作用于第二连接片上,促使锁定片可以更为稳定的对第二连接带进行限位,有效减少第一连接带与第二连接带发生脱离的可能性。
22.可选的,所述锁定片远离限位片的一端设置有锯齿条,且所述锯齿条插入第二连接带内。
23.通过采用上述技术方案,由于锯齿条的设置,使得当第一连接带以及第二连接带通过锁定件进行固定时,锯齿条可以插入第二连接条内,进而增大锁定片与第二连接带的接触面积,有效提高锁定片对第二连接片的锁定力,进一步减少第一连接带与第二连接带发生脱离的可能性。
24.综上所述,本技术包括以下至少一种有益技术效果:
25.1.当操作人员通过聚氨酯触点手套对光滑产品进行控制时,若干个弹性触点可以提高手套主体与光滑产品之间的摩擦力,进而有效提高对光滑产品的控制稳定性;
26.2.当操作人员通过聚氨酯触点手套对光滑产品进行控制时,锁定组件可以对操作
人员的手掌进行限位,间接提高对光滑产品的控制稳定性。
附图说明
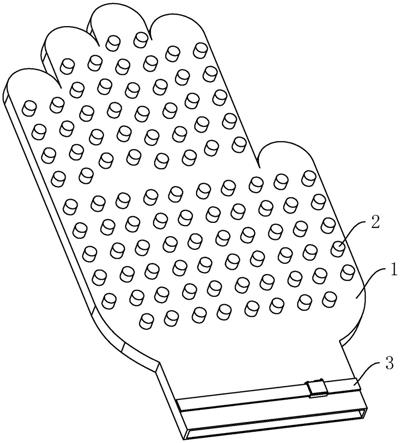
27.图1是聚氨酯触点手套的结构示意图。
28.图2是锁定组件的结构示意图。
29.图3是锁定件的爆炸示意图。
30.图4是第二连接带脱离锁定件时的结构示意图。
31.附图标记说明:1、手套主体;2、弹性触点;3、锁定组件;4、第一连接带;5、第二连接带;6、锁定件;7、底座;8、转动部;9、锁定架;10、限位片;11、锁定片;12、抵接片;13、锁定槽;14、连接片;15、定位螺栓;16、转动孔;17、锯齿条;18、球头柱塞;19、定位槽;20、控制片;21、控制槽。
具体实施方式
32.以下结合附图1-4对本技术作进一步详细说明。
33.本技术实施例公开一种聚氨酯触点手套。参照图1,聚氨酯触点手套包括手套主体1、若干固定连接于手掌主体的手掌面的弹性触点2以及固定连接于手套主体1的开口处的锁定组件3。其中,弹性触点2用于增加手套主体1与光滑产品之间的摩擦力,而锁定组件3用于对手掌以及手套主体1进行限位,进而有效提高聚氨酯触点手套对产品的控制稳定性。
34.在本实施例中,弹性触点2的数量可以根据实际任意设置,且若干弹性触点2的材质均为聚氨酯,而若干弹性触点2均通过点胶工艺均匀间隔粘接于手掌主体的手掌面上。
35.参照图1和图2,锁定组件3包括第一连接带4、第二连接带5以及锁定件6,在本实施例中,第一连接带4以及第二连接带5的材质均为橡胶,且第一连接带4以及第二连接带5均缝制于手套主体1的开口处,第一连接带4以及第二连接带5正对设置。
36.锁定件6缝制于第一连接带4远离手套主体1的一端,使得第二连接带5可以通过锁定件6与第一连接带4进行固定并形成小于手掌宽度的闭环,进而使得手掌可以通过锁定组件3对手套主体1进行限位,有效减少手套主体1与手掌发生脱离的可能性。
37.参照图2和图3,锁定件6包括缝制于第一连接带4远离手套主体1的一端的底座7、焊接固定于底座7的两侧的转动部8以及与转动部8转动连接的锁定架9,其中,底座7用于承载第二连接带5、转动部8用于旋转锁定架9,而锁定架9用于对第二连接带5进行锁定。
38.具体的,锁定架9包括限位片10以及焊接固定于限位片10的一端的锁定片11,其中,限位片10的两侧均焊接固定有抵接片12,且抵接片12靠近手套主体1的一侧与底座7远离手套主体1的一侧抵接。限位片10通过抵接片12与底座7形成供第二连接带5穿设的锁定槽13,而锁定片11容置于锁定槽13内并对第二连接带5进行锁定。
39.转动部8包括焊接固定于底座7的侧壁的连接片14以及转动连接于连接片14上的定位螺栓15,具体的,连接片14的侧壁贯穿开设有转动孔16,定位螺栓15的柱部穿设转动孔16并与限位片10的侧壁螺纹连接。
40.当需要通过锁定件6对第一连接带4以及第二连接带5进行锁定时,首先将第二连接带5穿设于锁定槽13内,当第一连接带4与第二连接带5形成指定大小的闭环后,通过定位螺栓15以及限位片10将锁定片11进行旋转并插入第二连接带5内,使得当第二连接带5将与
第一连接带4发生脱离时,底座7通过抵接片12限制限位片10的旋转,而限位片10又通过锁定片11限制第二连接带5的滑移,进而有效减少第二连接带5向远离第一连接带4的方向与第一连接带4发生脱离的可能性。
41.在本实施例中,锁定片11垂直焊接于限位片10的下端面,且锁定片11远离限位片10的一端焊接固定有锯齿条17,使得当需要通过锁定件6对第一连接带4以及第二连接带5进行固定时,锯齿条17可以垂直插入第二连接条内,促使锁定片11的锁定力可以完全作用于第二连接片14上,有效提升锁定件6对第一连接带4以及第二连接带5的锁定效果。需要说明的是,在其他实施例中,锁定片11与限位片10还可以呈锐角或者钝角设置。
42.而为了进一步提高锁定件6对第二连接带5的锁定效果,在本实施例中,每一个连接片14的内壁均嵌设有一个球头柱塞18,而限位片10的侧壁开设有一个定位槽19,且当锁定片11完全容置于锁定槽13内时,球头柱塞18恰好插接于定位槽19内,使得球头柱塞18可以通过定位槽19的槽壁限制限位片10的旋转,而限位片10通过锁定片11限制第二连接带5的滑移,进一步提升锁定件6对第一连接带4以及第二连接带5的锁定效果。
43.参照图3和图4,当需要将第一连接带4与第二连接带5进行脱离时,首先通过定位螺栓15以及限位片10将锁定片11脱离锁定槽13,随后便可以直接将第二连接带5从锁定槽13内脱离,促使对聚氨酯触点手套的脱离更为简单方便。
44.而为了更为简单的对限位片10进行控制,在本实施例中,每一个抵接片12远离限位片10的一侧均焊接固定有控制片20,且控制片20与底座7之间形成有供操作人员的手指插入的控制槽21,使得当需要通过限位片10迫使锁定片11脱离锁定槽13时,控制槽21可以给予操作人员一个握持的点,间接降低分离第一连接带4与第二连接带5的操作难度。
45.本技术实施例一种聚氨酯触点手套的实施原理为:
46.当需要对光滑产品进行控制时,首先将手套主体1套设于手掌上,随后将第二连接带5穿设锁定槽13,当第一连接带4与第二连接带5通过锁定件6形成小于手掌宽度的闭环后,便可以通过锁定架9对第二连接带5以及第二连接带5进行固定,随后便可以对光环产品进行控制。
47.此时,操作人员可以通过弹性触点2的形变增大手套主体1与光滑产品的摩擦力,而操作人员又可以通过锁定组件3限制手套主体1的移动,进而提升聚氨酯触点手套对光滑产品的控制稳定性。
48.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。