1.本实用新型涉及机械传动技术领域,尤其涉及基于人工智能的多层次回转系统。
背景技术:
2.人工智能,英文缩写为ai。它是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等。人工智能从诞生以来,理论和技术日益成熟,应用领域也不断扩大。我们从广泛意义上理解所谓的智能机器人,它给人的最深刻的印象是一个独特的进行自我控制的“活物”,智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”,在脑中起作用的是中央处理器,这种处理器跟操作它的人有直接的联系,最主要的是,这样的处理器可以进行有目的的一系列动作。
3.人工智能可以用于机构运动,但是现有的用于机构运动演示装置,功能过于单一,无任何趣味性,仅为将单一机构运动手动展示,无法完全深刻的将机构运动形式进行生动、全面的展示。
技术实现要素:
4.基于背景技术存在的技术问题,本实用新型提出了基于人工智能的多层次回转系统,以更直观的生动、全面的展示环形运动。
5.本实用新型提出的基于人工智能的多层次回转系统,包括台体和设置于台体上的旋转组件,所述旋转组件包括支架组件、步进电机、齿轮组件,支架组件包括至少两个可转动的抱卡支架,抱卡支架依次环状套设,内部抱卡支架通过齿轮组件与外部抱卡支架转动连接,步进电机的输出端与最外部抱卡支架连接。
6.进一步地,所述支架组件包括四个抱卡支架,四个抱卡支架分别为第一抱卡支架、第二抱卡支架、第三抱卡支架和第四抱卡支架,所述齿轮组件包括第一齿轮单元、第二齿轮单元、第三齿轮单元和第四齿轮单元,每个齿轮单元中的齿轮组相互啮合传动连接。
7.进一步地,步进电机的输出端穿过第一齿轮单元中的一个齿轮与第一抱卡支架固定连接,第一齿轮单元中的另一个齿轮通过第一传动轴与第二抱卡支架驱动连接,第二齿轮单元中的一个齿轮通过第二转动轴与第一抱卡支架连接、同时与第二抱卡支架固定连接。
8.进一步地,所述第二齿轮单元中的一个齿轮通过第三转动轴与第三抱卡支架固定连接,第三齿轮单元的一个齿轮通过第四转动轴与第二抱卡支架连接、同时与第三抱卡支架固定连接。
9.进一步地,所述第三齿轮单元中的一个齿轮通过第五转动轴与第四抱卡支架固定连接,第四齿轮单元的一个齿轮通过第六转动轴与第三抱卡支架连接、同时与第四抱卡支架固定连接。
10.进一步地,旋转组件外侧设置有保护罩,保护罩与台体固定连接。
11.本实用新型提供的基于人工智能的多层次回转系统的优点在于:本实用新型结构中提供的基于人工智能的多层次回转系统,通过步进电机驱动整个支架组件转动,整个机构整体运行平稳,因而可以直接观看机构运动,体验机械运动韵律;保护罩可以对旋转组件的机械演示进行保护,还可以作为防护罩,放置旋转组件落灰,造成内部机械传动受阻;多个抱卡支架依次套接,可以更直观的生动、全面的展示环形运动。
附图说明
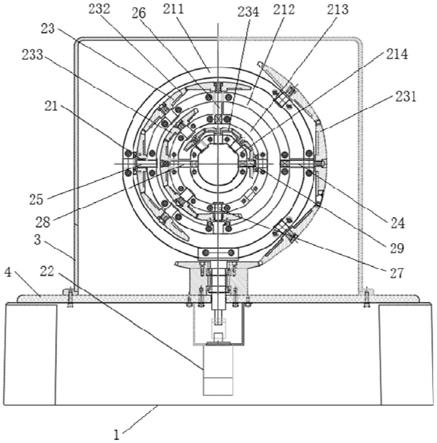
12.图1为本实用新型的结构示意图;
13.其中,1-台体,2-旋转组件,3-保护罩,4-底座,21-支架组件,22-步进电机,23-齿轮组件,24-第一传动轴,25-第二传动轴,26-第三传动轴,27-第四传动轴,28-第五传动轴,29-第六传动轴,211-第一抱卡支架,212-第二抱卡支架,213-第三抱卡支架,214-第四抱卡支架,231-第一齿轮单元,232-第二齿轮单元,233-第三齿轮单元,234-第四齿轮单元。
具体实施方式
14.下面,通过具体实施例对本实用新型的技术方案进行详细说明,在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施的限制。
15.如图1所示,本实用新型提出的基于人工智能的多层次回转系统,包括台体1和设置于台体1上的旋转组件2,所述旋转组件2包括支架组件21、步进电机22、齿轮组件23,支架组件21包括至少两个可转动的抱卡支架,抱卡支架依次环状套设,内部抱卡支架通过齿轮组件23与外部抱卡支架转动连接,步进电机22的输出端与最外部抱卡支架连接。
16.台体1上可以设置控制按钮,通过点击控制按钮,可以对步进电机22的工作状态进行控制,当步进电机22启动后,支架组件21中的抱卡支架可以转动,整个机构整体运行平稳,因而可以直接观看机构运动,体验机械运动韵律。
17.同时,采用步进电机22作为动力源,整个机构运行稳定,支架组件21可以使用金属抱卡支架,牢固稳定,同时台体1上可以设置不锈钢底座4,旋转组件2固定于底座4上,由于底座4,重要较重,因而机构运转时,可以降低重心,保证运转平稳。
18.同时可以在旋转组件2外侧设置保护罩3,保护罩3与台体1固定连接,保护罩3可以对旋转组件2的机械演示进行保护,还可以作为防护罩,放置旋转组件2落灰,造成内部机械传动受阻。
19.在本实施例中,所述支架组件21包括四个抱卡支架,四个抱卡支架分别为第一抱卡支架211、第二抱卡支架212、第三抱卡支架213和第四抱卡支架214,所述齿轮组件23包括第一齿轮单元231、第二齿轮单元232、第三齿轮单元233和第四齿轮单元234,每个齿轮单元中的齿轮组相互啮合传动连接。
20.设置四个抱卡支架,并且四个抱卡支架依次环状套设,可以直观看出四个抱卡支架相互环状转动的机械运动,同时可以通过点击台体上设置的用于控制步进电机22运转速度的按钮,可以调整各个抱卡支架的转动速度,以更好的体验机械运动韵律。
21.针对四个抱卡支架之间的转动实现结构,具体为:步进电机22的输出端穿过第一齿轮单元231中的一个齿轮与第一抱卡支架211固定连接,第一齿轮单元231中的另一个齿轮通过第一传动轴24与第二抱卡支架212驱动连接,第二齿轮单元232中的一个齿轮通过第二转动轴25与第一抱卡支架211连接、同时与第二抱卡支架212固定连接;其中,第一传动轴24的一端穿过第一抱卡支架211与第一齿轮单元231中的一个齿轮固定连接、另一端与第二抱卡支架212固定连接,第一传动轴24通过铜套实现与第一抱卡支架211之间的固定连接,同样第二转动轴25也可以通过外设铜套穿过第二齿轮单元232中的一个齿轮,以实现与第二齿轮单元232之间的转动连接。
22.通过第一传动轴24和第二传动轴25的设置,使得第二抱卡支架212可以在第一抱卡支架211内部转动,其转动轴线为第一传动轴24与第二传动轴25的轴线连线。
23.针对第三抱卡支架21的转动,具体为:所述第二齿轮单元232中的一个齿轮通过第三转动轴26与第三抱卡支架213固定连接,第三齿轮单元233的一个齿轮通过第四转动轴27与第二抱卡支架212转动连接、同时与第三抱卡支架213固定连接;其中,第三传动轴26一端通过铜套穿过第二抱卡支架212与第三齿轮单元233的一个齿轮连接、另一端与第三抱卡支架213固定连接,因而第三传动轴26通过外设的铜套与第二抱卡支架212转动连接。
24.通过第三转动轴26和第四转动轴27的设置,使得第三抱卡支架213可以在第二抱卡支架212内部转动,其转动轴线为第三转动轴26和第四转动轴27的轴线连线。
25.同理,针对第四抱卡支架214的转动,具体为:所述第三齿轮单元233中的一个齿轮通过第五转动轴28与第四抱卡支架214固定连接,第四齿轮单元234的一个齿轮通过第六转动轴29与第三抱卡支架213连接、同时与第四抱卡支架214固定连接。第五转动轴28的一端通过铜套穿过第三抱卡支架213与第三齿轮单元233中的一个齿轮固定连接、另一端与第四抱卡支架214固定连接,第五转动轴28作为第四抱卡支架214转动的一端支撑,第六转动轴29作为第四抱卡支架214转动的另一端支撑,使得第四抱卡支架214可以在第三抱卡支架213内部转动,其转动轴线为第五转动轴(28)和第六转动轴29的轴线连线。
26.工作过程:通过点击控制按钮,可以对步进电机22的工作状态进行控制,当步进电机22启动后,第一抱卡支架211转动,同时第一齿轮单元231、第二齿轮单元232、第三齿轮单元233和第四齿轮单元234中的齿轮组同步啮合传动,各个传动轴(24至29)均发生转动,带动对应的第二抱卡支架212、第三抱卡支架213第四抱卡支架214转动,使得整个支架组件21的转动,进而实现整个环形运动装置的环形转动,最终可以直接观看机构运动,体验机械运动韵律。
27.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。