1.本实用新型涉及无人机技术领域,具体为一种具有可折叠载物台结构的无人机。
背景技术:
2.随着科技的不断发展,且随着社会的进步,无人机步入人们的生活中,无人机指的是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,伴随着人们对无人机的认可和需求逐渐攀升,随着无人机的逐渐普及,其应用领域越来越广。
3.目前的,载物无人机在实际使用过程中依旧存在以下缺点;
4.1.现有的大多数的载物无人机都是将货物放在无人机的载物台上,利用绳索进行固定,导致载物台占空较大,而载物无人机的载物平台都是固定的,根据工作人员不同的使用需求,无人机的载物台无法进行折叠或是展开使用,降低了载物无人机的使用效率。
5.2.现有的载物无人机大多数都是利用绳索固定物品在载物无人机的载物平台上,而绳索具有弹性,在无人机的飞行过程中,会使物品的位置出现移动,导致无人机的重心偏移,导致无人机在落地时的机翼和地面发生碰撞,使无人机受损。
6.3.现有载物无人机着陆时大多数都是直接停止机翼运行直接着陆进行落地,而载物无人机因为载运物品,质量较大,这会导致载物无人机与地面发生撞击的作用力也会增加,使载物无人机载运的物品受到反向的作用力而受损,同时载物无人机也会受损,降低了载物无人机的使用寿命,降低了载物无人机的使用效率,为此我们提出了一种具有可折叠载物台结构的无人机。
技术实现要素:
7.本实用新型的目的在于提供一种具有可折叠载物台结构的无人机,以解决上述背景技术中提出了载物台无法根据使用需求折叠、重心易偏移和落地时易受损的问题。
8.为实现上述目的,本实用新型提供如下技术方案:一种具有可折叠载物台结构的无人机,包括机体、安装座、支撑杆、第二套筒和第三壳体,所述安装座固定连接在所述机体的顶部中间,所述支撑杆位于所述机体的底部下方,所述第二套筒套接在所述支撑杆的外侧壁上侧,所述第三壳体位于所述机体的底部下方,所述机体的前侧壁中间固定连接有摄像头,所述机体的顶部前右侧壁固定连接有控制开关,所述机体的左右两侧固定连接有第一固定块,所述第一固定块的外侧壁前后两侧固定连接有第一连接杆,且所述第一连接杆的外侧壁下侧和所述支撑杆的顶端固定连接,安装座的外侧壁套接第一套筒,所述第一套筒的外侧壁后下侧插接有第一限位块,且所述第一限位块贯穿所述第一套筒的外侧壁后下侧,并插接在所述安装座的外侧壁后下侧,所述第一套筒的外侧壁左右两侧中间固定连接有第二连接杆,所述支撑杆的底端固定连接有第二限位块,所述第二限位块的外侧壁滑动连接有第二壳体,所述支撑杆的外侧壁开有第一通孔,且所述第一通孔自上而下依次排列,所述第二套筒的外侧壁固定连接有第二连接件,所述第二连接件的内腔通过转轴转动连接有伸缩杆,所述伸缩杆的末端铰接有第三连接件,且所述第三连接件固定连接在所述第三
壳体的左右两侧壁前后两侧,所述第二套筒的外侧壁插接有第三限位块,且所述第三限位块贯穿所述第二套筒的外侧壁和所述第一通孔的内腔,并延伸至支撑杆的内腔,所述第三壳体的底部固定连接有水平仪,所述第三壳体的前侧壁左右两侧螺纹连接有第一螺杆,且所述第一螺杆贯穿所述第三壳体的前侧壁左右两侧,并延伸至所述第三壳体的内腔,所述第一螺杆的前端固定连接有第一把手,所述第一螺杆的末端转动连接有第一挡板,所述第三壳体的左右两侧壁中间开有第二通孔。
9.优选的,所述机体的底部左右两侧中间固定连接有第二固定块,所述第二固定块的外侧壁镶嵌有第一弹性件。
10.优选的,所述第一连接杆的末端固定连接有第一壳体,所述第一壳体的内腔底部固定连接有电机,所述电机的输出端贯穿所述第一壳体的内腔顶部,并延伸至所述第一壳体的上侧,所述电机的输出端固定连接有螺旋桨。
11.优选的,所述第一套筒的外侧壁前后两侧中间固定连接有第三连接杆,所述第二连接杆的末端和所述第三连接杆的末端均固定连接有第一连接件,所述第一连接件的外侧壁固定连接有护栏。
12.优选的,所述第二壳体的内腔底部和所述第二限位块的底部之间固定连接有第二弹性件,所述第二壳体的外侧壁左右两侧固定连接有支杆,所述支杆的内侧壁之间通过转轴转动连接有滚轮。
13.优选的,所述第三限位块的顶部固定连接有第三固定块,且所述第三固定块位于所述第二套筒的外侧,所述第三固定块的顶部铰接有压板,且所述压板贯穿所述第二套筒的外侧壁和第一通孔的内腔,并延伸至所述支撑杆的内腔,所述压板的顶部固定连接有第四固定块,且所述第四固定块位于所述支撑杆的内腔,所述第三限位块的顶部固定连接有第三弹性件,且所述第三弹性件位于所述支撑杆的内腔,所述第三弹性件的顶端固定连接有抵块,且所述抵块铰接在所述第三限位块的顶部。
14.优选的,所述第三壳体的内腔底部固定连接有第四弹性件,且所述第四弹性件自左到右依次排列,所述第四弹性件的顶端固定连接有底板。
15.优选的,所述第三壳体的后侧壁中间螺纹连接有第二螺杆,且所述第二螺延伸至所述第三壳体的内腔,所述第二螺杆的后端固定连接有第二把手,所述第二螺杆的前端转动连接有第二挡板,且所述第二挡板位于所述第三壳体的内腔。
16.与现有技术相比,本实用新型的有益效果是:
17.1.该具有可折叠载物台结构的无人机,首先按压设有的压板,通过压板对抵块施加压力,使第四固定块能够脱离第一通孔,并取出第三限位块,然后上下移动第二套筒,通过第二连接件。伸缩杆和第三连接件调节第三壳体的位置,再次使用第三限位块对第二套筒进行限位,使第三壳体能够对不同大小的物品进行承装,在第三壳体不承载物品时,通过转动伸缩杆并收缩,然后通过第三连接件使第三壳体上升,并通过第一弹性件卡入第二通孔内使第三壳体固定,使载物无人机能够根据工作人员不同的使用需求,进行折叠或是展开使用,提高了载物无人机的使用效率。
18.2.该具有可折叠载物台结构的无人机,通过设有的底板上摆放好物品,然后根据水平仪调节物品的位置,再通过第一把手转动带动第一螺杆旋转,使第一挡板从前侧向物品进行推进,然后在通过转动设有的第二把手带动第二螺杆转动,使第二挡板从后侧向物
品进行推进,通过第一挡板和第二挡板对物品进行夹持,然后通过设有的第二套筒在支撑杆的上下移动,使物品顶部和机体底部贴合,从而使物品与无人机形成整体,避免了物品在运输过程中重心偏移,避免了无人机在落地时的机翼和地面发生碰撞,避免了无人机受损。
19.3.该具有可折叠载物台结构的无人机,通过设有的滚轮接受落地时产生的碰撞并通过反向的作用力向前滑行以释放作用力,然后部分作用力通过设有的支杆将作用力传递至第二壳体,然后通过第二弹性件对作用力力进行缓冲,物品所受的作用力通过底板传递至第四弹性件进行缓冲,使物品受到的作用力大幅度减少,从而避免了载物无人机载运的物品受损,同时载物无人机也会受损,提高了载物无人机的使用寿命,提高了载物无人机的使用效率。
附图说明
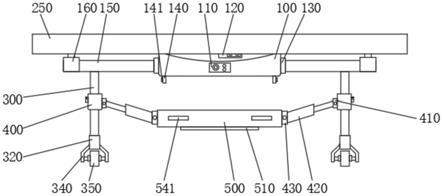
20.图1为本实用新型主视结构示意图;
21.图2为本实用新型俯视结构示意图;
22.图3为本实用新型支撑杆主视剖视结构示意图;
23.图4为本实用新型第三壳体主视剖视结构示意图;
24.图5为本实用新型第三壳体俯视剖视结构示意图。
25.图中:100、机体;110、摄像头;120、控制开关;130、第一固定块;140、第二固定块;141、第一弹性件;150、第一连接杆;160、第一壳体;161、螺旋桨;200、安装座;210、第一套筒;211、第一限位块;220、第二连接杆;230、第三连接杆;240、第一连接件;250、护栏;300、支撑杆;310、第二限位块;320、第二壳体;330、第二弹性件;340、支杆;350、滚轮;360、第一通孔;400、第二套筒;410、第二连接件;420、伸缩杆;430、第三连接件;440、第三限位块;441、第三固定块;442、压板;443、第四固定块;444、第三弹性件;445、抵块;500、第三壳体;510、水平仪;520、第四弹性件;530、底板;540、第一螺杆;541、第一把手;542、第一挡板;550、第二螺杆;551、第二把手;552、第二挡板;560、第二通孔。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.本实用新型提供一种具有可折叠载物台结构的无人机,载物台能够根据使用需求折叠、避免了重心偏移和避免了落地时受损,请参阅图1-5,包括机体100、安装座200、支撑杆300、第二套筒400和第三壳体500;
28.请参阅图1-2,机体100的前侧壁中间固定连接有摄像头110,机体100的顶部前右侧固定连接有控制开关120,机体100的左右两侧壁固定连接有第一固定块130,第一固定块130的外侧壁前后两侧固定连接有第一连接杆150,且第一连接杆150的外侧壁下侧和支撑杆300的顶端固定连接,机体100用于对安装座200进行支撑,摄像头110用于对机体100的行驶路线进行实时记录,控制开关120用于对机体100、摄像头110和电机的启停进行控制,第一固定块130用于对第一连接杆150进行支撑,第一连接杆150用于对第一壳体160进行支
撑;
29.请再次参阅图1-2,安装座200的外侧壁套接第一套筒210,第一套筒210的外侧壁后下侧插接有第一限位块211,且第一限位块211贯穿第一套筒210的外侧壁后下侧,并插接在安装座200的外侧壁后下侧,第一套筒210的外侧壁左右两侧中间固定连接有第二连接杆220,安装座200固定连接在机体100的顶部中间,安装座200用于对第一套筒210进行横向固定,第一套筒210用于对第二连接杆220和第三连接杆230进行支撑,第一限位块211用于对第一套筒210进行固定,第二连接杆220用于配合第三连接杆230和第一连接件240对护栏250进行支撑;
30.请参阅图1-3,支撑杆300的底端固定连接有第二限位块310,第二限位块310的外侧壁滑动连接有第二壳体320,支撑杆300的外侧壁开有第一通孔360,且第一通孔360自上而下依次排列,支撑杆300位于机体100的底部下方,具体的,支撑杆300通过第一连接杆150固定连接在机体100的底部下方,支撑杆300用于配合第一连接杆150对机体100进行支撑,第二限位块310用于对第二壳体320进行横向固定,第二壳体320用于对支杆340进行支撑,第一通孔360用于配合第三限位块440对第二套筒400进行限位;
31.请再次参阅图1-3,第二套筒400的外侧壁固定连接有第二连接件410,第二连接件410的内腔通过转轴转动连接有伸缩杆420,伸缩杆420的末端铰接有第三连接件430,且第三连接件430固定连接在第三壳体500的左右两侧壁前后两侧,第二套筒400的外侧壁插接有第三限位块440,且第三限位块440贯穿第二套筒400的外侧壁和第一通孔360的内腔,并延伸至支撑杆300的内腔,第二套筒400套接在支撑杆300的外侧壁上侧,第二套筒400用于配合第二连接件410、伸缩杆420和第三连接件430对第三壳体500进行支撑,第二连接件410用于对伸缩杆420的角度进行调节,伸缩杆420用于配合第三连接件430对第三壳体500的位置进行调节,第三连接件430用于对第三壳体500进行支撑固定,第三限位块440用于对第二套筒400进行限位;
32.请再次参阅图1-5,第三壳体500的底部固定连接有水平仪510,第三壳体500的前侧壁左右两侧螺纹连接有第一螺杆540,且第一螺杆540贯穿第三壳体500的前侧壁左右两侧,并延伸至第三壳体500的内腔,第一螺杆540的前端固定连接有第一把手541,第一螺杆540的末端转动连接有第一挡板542,第三壳体500的左右两侧壁中间开有第二通孔560,第三壳体500位于机体100的底部下方,第三壳体500通过第二套筒400、第二连接件410、伸缩杆420和第三连接件430固定连接在机体100的底部下方,第三壳体500用于对物品进行承装,水平仪510用于对机体100的重心进行测量,第一螺杆540用于对第一挡板542进行支撑,第一把手541用于对转动第一螺杆540提供便捷,第一挡板542用于配合第二挡板552对物品进行夹持。
33.请再次参阅图1-2,为了使第三壳体500在折叠时能够通过第二通孔560和第一弹性件141的配合固定在机体100的下方,机体100的底部左右两侧中间固定连接有第二固定块140,第二固定块140的外侧壁镶嵌有第一弹性件141。
34.请再次参阅图1-2,为了提高电机和螺旋桨161的使用效率,第一连接杆150的末端固定连接有第一壳体160,第一壳体160的内腔底部固定连接有电机,电机的输出端贯穿第一壳体160的内腔顶部,并延伸至第一壳体160的上侧,电机的输出端固定连接有螺旋桨161。
35.请再次参阅图1-2,为了避免螺旋桨161在使用过程中受损,第一套筒210的外侧壁前后两侧中间固定连接有第三连接杆230,第二连接杆220的末端和第三连接杆230的末端均固定连接有第一连接件240,第一连接件240的外侧壁固定连接有护栏250。
36.请再次参阅图1-3,为了减少无人机在降落后产生的作用力,第二壳体320的内腔底部和第二限位块310的底部之间固定连接有第二弹性件330,第二壳体320的外侧壁左右两侧固定连接有支杆340,支杆340的内侧壁之间通过转轴转动连接有滚轮350。
37.请再次参阅图1-3,为了提高第二套筒400的使用效率,第三限位块440的顶部固定连接有第三固定块441,且第三固定块441位于第二套筒400的外侧,第三固定块441的顶部铰接有压板442,且压板442贯穿第二套筒400的外侧壁和第一通孔360的内腔,并延伸至支撑杆300的内腔,压板442的顶部固定连接有第四固定块443,且第四固定块443位于支撑杆300的内腔,第三限位块440的顶部固定连接有第三弹性件444,且第三弹性件444位于支撑杆300的内腔,第三弹性件444的顶端固定连接有抵块445,且抵块445铰接在第三限位块440的顶部。
38.请再次参阅图1-5,为了使无人机在降落时产生的作用力能够通过第四弹性件520对携带物品进行缓冲,第三壳体500的内腔底部固定连接有第四弹性件520,且第四弹性件520自左到右依次排列,第四弹性件520的顶端固定连接有底板530。
39.请再次参阅图1-5,为了使第二挡板552能够配合第一挡板542对携带物品进行夹持,第三壳体500的后侧壁中间螺纹连接有第二螺杆550,且第二螺杆550延伸至第三壳体500的内腔,第二螺杆550的后端固定连接有第二把手551,第二螺杆550的前端转动连接有第二挡板552,且第二挡板552位于第三壳体500的内腔。
40.在具体的使用时,本技术领域人员首先手动安压压板442,第三弹性件444收缩带动抵块445向下转动,然后取出第三限位块440,接着工作人员用手滑向下动第二套筒400,第三壳体500同时下降,接着将需要载运的物品放入第三壳体500中的底板530中,然后根据水平仪510调节物品的位置,接着转动第一把手541,第一把手541带动第一螺杆540转动,第一螺杆540推动第一挡板542接触物品,这时转动第二把手551带动第二螺杆550转动,第二螺杆550推动第二挡板552对物品进行接触并配合第一挡板542对物品进行夹持,然后向上推动第二套筒400,使物品接触到机体100时停止,再使用第三限位块440插入第一通孔360中对第二套筒400进行固定,然后开启控制开关120控制机体100启动,当无人机落地时,滚轮350接触到地面产生反向作用力,使滚轮350向前移动释放作用力,部分作用力通过支杆340传导至第二弹性件330中,第二弹性件330受到第二限位块310的压力而收缩并对作用力进行缓冲,同时第四弹性件520受到物品的作用力收缩缓冲,然后无人机在完全落地停止后拿起,并按压压板442取出第三限位块440,然后向下移动第二套筒400,接着手动转动第一把手541和第二把手551,取出物品即可。
41.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
42.虽然在上文中已经参考实施例对本实用新型进行了描述,然而在不脱离本实用新型的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本实用新型所披露的实施例中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本实用新型并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。