1.本技术涉及飞行器领域,尤其涉及一种无人机。
背景技术:
2.惯性测量单元(imu,英文全称:inertial measurement unit)是测量无人机姿态的重要器件,需要较为牢固地安装在无人机上以提高无人机姿态测量的可靠性。
3.目前,大部分无人机的惯性测量单元是通过安装架固定在无人机的机身内壳上的,需要在机身内壳上单独设计另外的空间结构来固定安装架,从而固定惯性测量单元。然而,由于机身内部的使用空间基本被各种功能模块的pcb(printed circuit board,印制电路板)所占据,对惯性测量单元的安装也形成一定的阻碍,也使得上述固定惯性测量单元的方式需要占据较多的空间,不利于无人机的小型化设计。
技术实现要素:
4.本技术提供一种无人机。
5.具体地,本技术是通过如下技术方案实现的:
6.一种无人机,包括机身和设于所述机身内的惯性测量单元,还包括用于固定所述惯性测量单元的安装架以及固定设于所述机身内且集成有多种功能模块的电路板;其中,所述惯性测量单元通过所述安装架安装在所述电路板上;所述安装架包括第一支架及第二支架,所述第一支架定位在所述电路板上,所述第二支架设于所述第一支架远离所述电路板的一侧,所述惯性测量单元固定于所述第二支架远离所述第一支架的一侧。
7.由以上本技术实施例提供的技术方案可见,本技术通过将用于固定惯性测量单元的安装架安装在设于机身内部的电路板上,实现惯性测量单元的固定,无需在机身内壳上设计另外的空间结构来安装固定惯性测量单元的安装架,使得机身内部的结构更加紧凑,从而节省机身内部的使用空间,有利于无人机的小型化设计;双层支架能够降低惯性测量单元受到的机身振动的影响,且双层支架能够较好地隔开惯性测量单元与电路板,减少惯性测量单元与电路板上的元器件的干涉(惯性测量单元在一定空间独立运动,不会长期接触电路板上的元器件,故不会导致元器件磨损);同时,将多种功能集成在同一电路板上,进一步使得结构更加紧凑,从而进一步节省空间,使得无人机进一步朝着小型化方向发展。
附图说明
8.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
9.图1是本技术实施例中无人机的结构示意图;
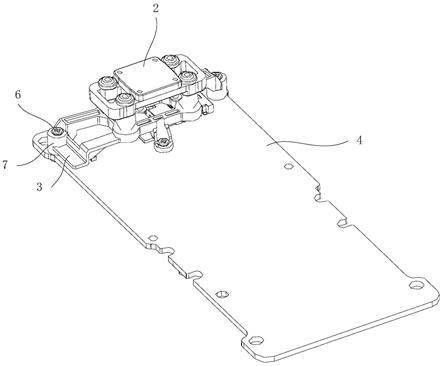
10.图2是本技术实施例中无人机部分结构的立体示意图;
11.图3是本技术实施例中无人机部分结构的组装示意图,揭示了电路板和安装架之间的位置关系;
12.图4是本技术实施例中无人机另一部分结构的组装示意图,揭示了电路板和安装部之间的位置关系;
13.图5是本技术实施例中无人机另一部分结构的立体示意图。
14.附图标记:
15.1:机身;2:惯性测量单元;3:安装架;4:电路板;41:安装孔;5:安装部;51:插接部;52:止挡部;6:紧固件;7:定位件。
具体实施方式
16.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
17.下面结合附图,对本技术的无人机进行详细说明。在不冲突的情况下,下述的实施例及实施方式中的特征可以相互组合。
18.参见图1,本技术实施例提供一种无人机,所述无人机可包括机身1、惯性测量单元2、安装架3以及电路板4。其中,所述惯性测量单元2、安装架3以及电路板4均设于所述机身1内,具体地,所述机身1包括一容纳空间,用以容纳所述惯性测量单元2、安装架3以及电路板4。
19.参见图2,所述安装架3用于固定所述惯性测量单元2,并且所述安装架3安装在所述电路板4上,即所述惯性测量单元2通过所述安装架3安装在所述电路板4上,通过电路板4直接安装固定有惯性测量单元2的安装架3,无需在单独在机身1内壳上另外设置用于安装所述安装架3的空间结构,从而节省机身1内部的使用空间,有利于无人机的小型化设计,使得无人机使得结构更加紧凑。在一些例子中,所述惯性测量单元2可通过卡接或者粘贴的方式固定在所述安装架3上。在其他一些例子中,所述惯性测量单元2可通过螺纹等方式固定在所述安装架3上。
20.安装架3包括第一支架及第二支架,第一支架定位在电路板4上,第二支架设于第一支架远离电路板4的一侧,惯性测量单元2固定于第二支架远离第一支架的一侧。双层支架能够降低惯性测量单元2受到的无人机机身振动的影响,且双层支架能够较好地隔开惯性测量单元2与电路板4,减少惯性测量单元2与电路板4上的元器件的干涉(惯性测量单元2在一定空间独立运动,不会长期接触电路板4上的元器件,故不会导致元器件磨损)。
21.为进一步节省机身1内部的使用空间,为无人机的进一步小型化提供可能,所述电路板4集成有多种功能模块。在一些例子中,所述功能模块至少能够用于控制无人机的工作状态。其中,所述工作状态可包括飞行、返航、拍摄等。在一些例子中,所述功能模块至少能够用于采集数据信息。其中,所述数据信息至少包括无人机上拍摄设备拍摄的图像数据信息、无人机的位置数据信息、无人机的电量信息中的一种或多种,所述数据信息还可包括遥控无人机的设备发送的遥控信号等其他数据信息。在一些例子中,所述功能模块至少能够用于控制无人机的工作状态和采集数据信息。当然,所述功能模块还可包括其他控制无人机运行的功能,通过将无人机工作所需的功能均集成至一块电路板4上,使得结构更加紧凑以有效减小无人机的体积,使得无人机更加小型化。
22.另外,所述电路板4是固定在机身1内的,从而使得电路板4稳定设于无人机上。在一些例子中,所述电路板4的四周与机身1的内壁固定,例如,通过卡接或螺纹连接当方式。在一些例子中,机身1内部设有固定在机身1内壁的转接件,所述电路板4通过转接件与机身1内壁相固定。
23.本技术实施例中,通过将用于固定惯性测量单元2的安装架3安装在设于机身1内部的电路板4上,实现惯性测量单元2的固定,无需在机身1内壳上设计另外的空间结构来安装固定惯性测量单元2的安装架3,使得机身1内部的结构更加紧凑,从而节省机身1内部的使用空间,有利于无人机的小型化设计。同时,将多种功能集成在同一电路板4上,进一步使得结构更加紧凑,从而进一步节省空间,使得无人机进一步朝着小型化方向发展。
24.为使得惯性测量单元2能够较为准确地检测到无人机的姿态,本实施例中,所述惯性测量单元2挂设在所述电路板4上。以无人机螺旋桨作为参照,惯性测量单元2安装在电路板4上远离所述螺旋桨的一侧,从而使得惯性测量单元2挂设在无人机的内部。本实施例中,机身1包括上壳(图中未显示)和下壳(图中未标出),上壳和下壳包围形成所述容纳空间,其中所述惯性测量单元2位于所述电路板4和所述下壳之间。
25.参见图1,机身1包括下壳,下壳的一端向下凹陷形成一收容空间,电路板4覆盖在所述收容空间的上方,惯性测量单元2挂设在电路板4上,并收容在收容空间内,且惯性测量单元2与电路板4电连接。下壳形成的收容空间不仅合理地利用空间,还能够对惯性测量单元2形成有效保护。
26.另外,所述惯性测量单元2与所述电路板4电连接,从而可将其检测的无人机姿态数据传输至电路板4上,由电路板4做进一步地处理后后续的操作。可选地,所述惯性测量单元2通过柔性电路板4实现与电路板4的电连接。在本实施方式中,所述柔性电路板4一端粘接于所述惯性测量单元2,另一端粘接于所述电路板4上,并与所述电路板4上的印制电路电连接。
27.在一些实施例中,所述安装架3可通过卡接或者粘接的方式直接固定在所述电路板4上。例如,所述电路板4上开设插接孔,所述安装架3上设有与所述插接孔相配合的凸起,从而实现安装架3与电路板4的固定连接,以将所述惯性测量单元2固定至所述电路板4上。需要说明的是,插接孔开设在电路板4上的位置需要避开电路板4上印制电路的位置,防止电路板4上的印制电路损坏而导致电路板4不能正常工作。
28.在一些实施例中,结合图3至图5,为实现安装架3与电路板4的固定连接,所述电路板4上设有安装部5,第一支架与所述安装部5相连以使第一支架定位在电路板4上。需要说明的是,安装部5设于电路板4上的位置需要避开电路板4上的印制电路的位置,防止电路板4上的印制电路损坏而导致电路板4不能正常工作。
29.在一些例子中,第一支架可通过卡接或者粘接的方式固定在所述安装部5上。例如,所述安装部5与第一支架通过凹凸配合的方式实现卡接连接。在一些例子中,参见图3,为使得第一支架能够更为稳定地固定在安装部5上,所述无人机还可包括紧固件6,第一支架通过所述紧固件6与所述安装部5相连。为了保障第一支架与安装部5之间的连接更加牢固,本实施例选择紧固件6方式连接第一支架与安装部5。
30.可选地,所述安装部5可为螺母,所述紧固件6可为与所述螺母配合的螺丝。当然,在其他一些实施例中,所述安装部5、紧固件6也可为其它相互配合锁定的结构。例如,所述
安装部5、紧固件6为凹凸配合卡接连接的结构。
31.参见图4,为定位所述螺母,便于将所述螺母安装在电路板4上,所述电路板4上设有安装孔41,用以安装所述螺母。在一些例子中,为进一步将螺母紧固在电路板4上,所述螺母穿设所述安装孔41后焊接在所述电路板4上。可选地,所述螺母通过回流焊、波峰焊和手工焊中的至少一种焊接在所述电路板4上。而为方便所述螺母焊接固定在所述电路板4上,所述螺母由铜材质制作或表面镀铜的其他金属材质制作而成。当然,所述螺母也可选择表面设有铜层的其他材质例制作,例如螺母的芯部为塑料材质,芯部的外表面套设有铜层。其中,铜层可通过粘接的方式与芯部相连。在一些例子中,为进一步将螺母紧固在电路板4上,所述螺母和所述安装孔41的连接处可设有粘接层。
32.在一些例子中,结合图3和图4,所述螺母为板贴螺母,其包括插接部51和止挡部52。其中,所述插接部51插入所述安装孔41后,所述止挡部52覆盖所述安装孔41以限制所述螺母相对插入方向运动,从而便于所述螺母的安装。其中所述插入方向为所述插接部51插入所述安装孔41的方向。
33.本实施例中,螺母的数量可根据需要设定。为将安装架3更牢固地固定在电路板4上,所述螺母至少两个,在至少两个位置处将第一支架与电路板4相连,从而保证惯性测量单元2能够稳定地固定在电路板4上,防止无人机飞行过程中惯性测量单元2晃动导致的测量不准确。在一具体的实现方式中,所述螺母为三个,呈三角形分布于所述电路板4上,结构简单,且能够保证惯性测量单元2较为牢固地固定在电路板4上。
34.结合图2和图3,第一支架上设有与所述安装部5配合的定位件7,用于将第一支架定位至所述电路板4,从而方便、快速地将第一支架固定至电路板4上。在一些例子中,所述定位件7可包括穿设孔,用于套设所述安装部5以将第一支架定位至所述电路板4。本实施例中,定位件7的数量与安装部5的数量相同且一一对应。
35.其中,将安装架3与电路板4固定的过程为:将定位件7和对应的安装部5对准以使得各定位件7分别穿设与之对应的安装部5,再采用紧固件6将相互配合的定位件7与安装部5锁紧。可见,定位件7定位至对应的安装部5后,定位件7能够对与之对应配合的安装部5进行限位,使得第一支架和安装部5仅可沿着定位件7穿设安装部5的方向移动,而在其他方向无法移动。进一步通过紧固件6来锁紧定位件7与安装部5,即可防止安装架3和安装部5在定位件7穿设安装部5的方向移动,实现了第一支架和安装部5的锁定,从而将第一支架固定至电路板4上。
36.参见图2和图3,定位件7设于第一支架的边缘处,从而通过定位件7将第一支架的边缘定位在安装部5上。
37.在一些实施例中,所述定位件7与所述安装架3一体成型,结构简单、稳定性强。在其他一些实施例中,所述定位件7是独立于所述安装架3的部件。定位件7可通过卡接、螺纹等连接方式固定在所述安装架3上的。
38.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有
的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
39.以上对本技术实施例所提供的无人机进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。