1.本发明涉及无人机技术领域,尤其涉及一种自适应降落无人机及使用方法。
背景技术:
2.目前,无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。但是目前在使用无人机的过程中,常常会出现炸机的情况,炸机是术语,一般来说,由于操作不当或机器降落等因素导致飞行航模不正常坠地是炸机,影响了内部结构,或坠地后航模完全被摔碎分解,一般来说,新手在操作时掌握不好无人机的电量,经常会导致剩余电量不足以接受遥控信号以及返航所需的电能,此时无人机便会以自由落体的形式下坠砸向地面,如此一来无人机就会损坏损毁,所以需要一种在电量耗尽时能够对自适应降落防止自身损坏的无人机。
技术实现要素:
3.本发明要解决上述现有技术存在的问题,提供一种自适应降落无人机,能够对无人机进行实时监控,能够在无人机电量耗尽时停止传动无人机的扇叶,防止在降落时无人机随意运动撞击到其他地方,造成二次伤害,与此同时能够及时展开降落伞,减轻无人机落地时的冲击力,简单高效,方便快捷,实用性强。
4.本发明解决其技术问题采用的技术方案:这种自适应降落无人机,包括第一箱体,所述第一箱体内部从上到下设有第一腔体、第二腔体、第三腔体,所述第一箱体左右两端对称固定安装有第二箱体,所述第一腔体左右两端内壁固定安装有电机,所述电机上固定安装有穿过第二箱体右端并与其转动连接的第一转轴,所述第二箱体左端内壁转动连接有与第一转轴轴线对齐的第二转轴,所述第一转轴外侧设有第一花键槽,所述第二转轴外侧设有第二花键槽,所述第一转轴外侧滑动连接有第一滑动套和第二滑动套,所述第一滑动套和第二滑动套内壁分别设有伸入第一花键槽并与其滑动连接的第一滑动键和第二滑动键,所述第一滑动套外侧固定安装有圆台,所述第二滑动套靠近第一滑动套一端阵列设有伸缩槽,所述第一滑动套靠近第一滑动滑动套一端阵列固定安装有伸入伸缩槽并与其滑动连接的滑动杆,所述滑动杆与伸缩槽远离第一滑动套一端内壁固定安装有第一弹簧,所述第二箱体底部内壁转动连接有顶部穿过第二箱体顶部的第三转轴,所述第三转轴外侧固定安装有位于第二箱体上方的扇叶,所述第三转轴外侧固定安装有位于第二箱体内部的第一蜗轮,所述第二转轴通过蜗齿与第一蜗轮啮合,所述第二箱体顶部内壁和底部内壁固定安装
有位于第一蜗轮和第二花键槽之间的第一隔板,所述第一隔板上固定安装有抵住圆台的第二弹簧,所述第二弹簧环绕第一滑动套和第二滑动套,所述第二箱体顶部内壁和底部内壁转动连接有第四转轴,所述第四转轴外侧固定安装有第二蜗轮,所述第一转轴与第二蜗轮通过蜗齿啮合,所述第二蜗轮位于第一滑动套靠近第一箱体一方。该结构能够在电量快要耗尽时及时让扇叶停止旋转,防止自由运动到处撞击造成二次伤害。
5.为了进一步完善,所述第一隔板与第二箱体靠近第一箱体一端固定安装有位于圆台下方的第二隔板,所述第四转轴穿过第二隔板并与其转动连接,所述第四转轴外侧设有位于第二隔板下方的圆环板,所述圆环板顶部设有圆弧环,所述圆环板内壁之间固定安装有穿过第四转轴后与其转动连接的第五转轴,所述第二箱体内部设有抵住圆弧环顶部的顶板,所述顶板顶部固定安装有穿过第二隔板后抵住圆台斜边的第一顶杆,所述顶板与第二隔板之间固定安装有环绕第一顶杆的第三弹簧,所述第二腔体左右两端内壁设有连通外界的第一升降槽,所述第一箱体外侧固定安装有位于第一升降槽下方的第二支撑板,所述第二箱体底部固定安装有与第二支撑板固定连接的第一辅助滑杆,所述第一辅助滑杆上滑动连接有穿过第一升降槽后到达第二腔体内部的第一滑板,所述第一滑板位于第二腔体内一端固定安装有第一齿条,所述第一滑板顶部固定安装有穿过第二箱体底部内壁后抵住圆弧环底部的第二顶杆,所述第一滑板与第二箱体底部之间固定安装有环绕第二顶杆的第四弹簧,所述第二腔体内壁对称转动连接有第六转轴,所述第六转轴外侧固定安装有与第一齿条啮合的第一齿轮。
6.为了进一步完善,所述第三腔体内部对称设有穿过第三腔体后到达第二腔体的第二齿条,所述第二齿条与第一齿轮啮合,所述第三腔体内部对称设有压板,所述压板上设有通道,所述第二齿条底部穿过通道,所述第二齿条底部固定安装有能够穿过通道的卡板,所述卡板位于压板下方,所述第三腔体底部对称设有位于通道左右两方的第二辅助滑杆,所述辅助滑杆顶部穿过压板,所述第二辅助滑杆顶部固定安装有位于压板上方的限位板,所述压板与第三腔体底部内壁之间固定安装有环绕第二辅助滑杆的第五弹簧。
7.为了进一步完善,所述卡板上对称设有卡槽,所述卡槽内部滑动连接有延伸出卡槽的滑块,所述滑块外侧阵列分布有滑槽,所述卡槽内壁固定安装有伸入滑槽内部并与其滑动连接的到导向块,所述滑块与卡槽远离第二辅助滑杆一端固定安装有第六弹簧,所述第三腔体底部内壁对称固定安装有能够控制气缸伸缩的行程开关,所述行程开关能被压板压动。
8.为了进一步完善,所述第二腔体内壁底部固定安装有穿过第二腔体和第一腔体后到达第一箱体上方的承台,所述承台外侧滑动连接有穿过第二腔体和第一腔体后到达第一箱体上方的滑套,所述滑套外侧固定安装有位于第二腔体内部的升降板,所述第一腔体内壁顶部固定安装有穿过第二腔体的气缸,所述气缸输出轴与升降板固定连接,所述承台顶部固定安装有位于滑套内部的降落伞。该结构能够在需要时快速启动降落伞。
9.为了进一步完善,所述第二箱体顶部固定安装有第一支撑板,所述第一转轴穿过第一支撑板并与其转动连接。
10.一种自适应降落无人机的使用方法,其步骤如下:一、起飞:启动电机,电机带动第一转轴旋转,第一转轴旋转带动第一滑动套、第二滑动套、第二蜗轮旋转,第二蜗轮旋转带动第四转轴旋转,第四转轴旋转后通过第五转轴带
动圆环板旋转和圆弧环,圆环板和圆弧环旋转时通过离心力回正,圆弧环回正时推动顶板上升,圆环板回正推动第二顶杆下降,顶板上升推动第一顶杆上升,第一顶杆上升时通过圆台的斜边推动圆台移动,圆台移动后带动第一滑动套移动,第一滑动套移动后通过第一弹簧推动第二滑动套移动至第二转轴外侧,并将第一滑动键滑入第二花键槽内,以便于带动第二转轴旋转,第二转轴旋转时带动带动第一蜗轮旋转,第一蜗轮旋转带动第三转轴旋转,第三转轴旋转带动扇叶旋转,使得无人机起飞;二、自适应降落:第二顶杆下降时带动第一齿条下降,第一齿条下降带动第一齿轮旋转,第一齿轮旋转带动第二齿条上升,第二齿条上升带动卡板通过通道,此时如果电量耗尽时第一转轴的输出动力减弱,进而导致圆弧环和圆环板复位,圆弧环和圆环板复位后第二滑动套也在第二弹簧的作用下复位,停止与第二转轴接触,此时扇叶停止旋转,防止无人机无规律飞行,随后第一滑板上升,第一滑板上升带动第一齿条上升,第一齿条上升带动第一齿轮旋转,第一齿轮旋转带动第二齿条下降,第二齿条下降使得滑块推动压板下降,压板下降压动行程开关,行程开关被压动后带动气缸伸长,气缸伸长带动滑套下降,释放出降落伞,进而使得无人机缓慢降落,防止摔坏,只有在两个行程开关都被按动时气缸才会被启动,因为无人机在转向时会减低某个扇叶的转速,在正常降落时需提前遥控关闭气缸的开关,防止在正常降落时打开降落伞。
11.本发明有益的效果是:本发明结构简单,操作简便,能够对无人机进行实时监控,能够在无人机电量耗尽时停止传动无人机的扇叶,防止在降落时无人机随意运动撞击到其他地方,造成二次伤害,与此同时能够及时展开降落伞,减轻无人机落地时的冲击力,简单高效,方便快捷,实用性强。
附图说明
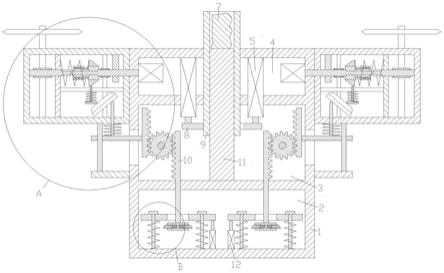
12.图1为本发明的结构示意图;图2为图1中的局部放大图a;图3为图1中的局部放大图b;图4为图2中的局部放大图c;图5为本发明中圆环板和圆弧环的结构示意图。
13.附图标记说明:第一箱体1、第三腔体2、第二腔体3、第一腔体4、气缸5、第二隔板6、降落伞7、升降板8、滑套9、第二齿条10、承台11、行程开关12、第二滑动键13、第三转轴14、第一隔板15、扇叶16、第四转轴17、第一支撑板18、第一转轴19、第一滑动键20、电机21、第二顶杆22、第一齿条23、第一齿轮24、第六转轴25、第一升降槽26、第一滑板27、第二支撑板28、第一辅助滑杆29、第四弹簧30、第一滑动套31、圆环板32、圆弧环33、顶板34、第三弹簧35、第二箱体36、第二转轴37、第一蜗轮38、第五转轴39、第二花键槽40、第二滑动套41、第一花键槽42、第二蜗轮43、圆台44、第一顶杆45、滑动杆46、第一弹簧47、伸缩槽48、第二弹簧49、限位板50、压板51、第五弹簧52、滑块53、滑槽54、卡槽55、卡板56、第六弹簧57、导向块58、第二辅助滑杆59、通道60。
具体实施方式
14.下面结合附图对本发明作进一步说明:
参照附图1、2、3、4、5:本实施例中这种自适应降落无人机,包括第一箱体1,所述第一箱体1内部从上到下设有第一腔体4、第二腔体3、第三腔体2,所述第一箱体1左右两端对称固定安装有第二箱体36,所述第一腔体4左右两端内壁固定安装有电机21,所述电机21上固定安装有穿过第二箱体36右端并与其转动连接的第一转轴19,所述第二箱体36左端内壁转动连接有与第一转轴19轴线对齐的第二转轴37,所述第一转轴19外侧设有第一花键槽42,所述第二转轴37外侧设有第二花键槽40,所述第一转轴19外侧滑动连接有第一滑动套31和第二滑动套41,所述第一滑动套31和第二滑动套41内壁分别设有伸入第一花键槽42并与其滑动连接的第一滑动键20和第二滑动键13,所述第一滑动套31外侧固定安装有圆台44,所述第二滑动套41靠近第一滑动套31一端阵列设有伸缩槽48,所述第一滑动套31靠近第一滑动滑动套41一端阵列固定安装有伸入伸缩槽48并与其滑动连接的滑动杆46,所述滑动杆46与伸缩槽48远离第一滑动套31一端内壁固定安装有第一弹簧47,所述第二箱体36底部内壁转动连接有顶部穿过第二箱体36顶部的第三转轴14,所述第三转轴14外侧固定安装有位于第二箱体36上方的扇叶16,所述第三转轴14外侧固定安装有位于第二箱体36内部的第一蜗轮38,所述第二转轴37通过蜗齿与第一蜗轮38啮合,所述第二箱体36顶部内壁和底部内壁固定安装有位于第一蜗轮38和第二花键槽40之间的第一隔板15,所述第一隔板15上固定安装有抵住圆台44的第二弹簧49,所述第二弹簧49环绕第一滑动套31和第二滑动套41,所述第二箱体36顶部内壁和底部内壁转动连接有第四转轴17,所述第四转轴17外侧固定安装有第二蜗轮43,所述第一转轴19与第二蜗轮43通过蜗齿啮合,所述第二蜗轮43位于第一滑动套31靠近第一箱体1一方。所述第一隔板15与第二箱体36靠近第一箱体1一端固定安装有位于圆台44下方的第二隔板6,所述第四转轴17穿过第二隔板6并与其转动连接,所述第四转轴17外侧设有位于第二隔板6下方的圆环板32,所述圆环板32顶部设有圆弧环33,所述圆环板32内壁之间固定安装有穿过第四转轴17后与其转动连接的第五转轴39,所述第二箱体36内部设有抵住圆弧环33顶部的顶板34,所述顶板34顶部固定安装有穿过第二隔板6后抵住圆台44斜边的第一顶杆45,所述顶板34与第二隔板6之间固定安装有环绕第一顶杆45的第三弹簧35,所述第二腔体3左右两端内壁设有连通外界的第一升降槽26,所述第一箱体1外侧固定安装有位于第一升降槽26下方的第二支撑板28,所述第二箱体36底部固定安装有与第二支撑板28固定连接的第一辅助滑杆29,所述第一辅助滑杆29上滑动连接有穿过第一升降槽26后到达第二腔体3内部的第一滑板27,所述第一滑板27位于第二腔体3内一端固定安装有第一齿条23,所述第一滑板27顶部固定安装有穿过第二箱体36底部内壁后抵住圆弧环33底部的第二顶杆22,所述第一滑板27与第二箱体36底部之间固定安装有环绕第二顶杆22的第四弹簧30,所述第二腔体3内壁对称转动连接有第六转轴25,所述第六转轴25外侧固定安装有与第一齿条23啮合的第一齿轮24。所述第三腔体2内部对称设有穿过第三腔体2后到达第二腔体3的第二齿条10,所述第二齿条10与第一齿轮24啮合,所述第三腔体2内部对称设有压板51,所述压板51上设有通道60,所述第二齿条10底部穿过通道60,所述第二齿条10底部固定安装有能够穿过通道60的卡板56,所述卡板56位于压板51下方,所述第三腔体2底部对称设有位于通道60左右两方的第二辅助滑杆59,所述辅助滑杆59顶部穿过压板51,所述第二辅助滑杆59顶部固定安装有位于压板51上方的限位板50,所述压板51与第三腔体2底部内壁之间固定安装有环绕第二辅助滑杆59的第五弹簧52。所述卡板56上对称设有卡槽55,所述卡槽55内部滑动连接有延伸出卡槽55的滑块53,所述滑块53外侧阵列分
布有滑槽54,所述卡槽55内壁固定安装有伸入滑槽54内部并与其滑动连接的到导向块58,所述滑块53与卡槽55远离第二辅助滑杆59一端固定安装有第六弹簧57,所述第三腔体2底部内壁对称固定安装有能够控制气缸5伸缩的行程开关12,所述行程开关12能被压板51压动。所述第二腔体3内壁底部固定安装有穿过第二腔体3和第一腔体4后到达第一箱体1上方的承台11,所述承台11外侧滑动连接有穿过第二腔体3和第一腔体4后到达第一箱体1上方的滑套9,所述滑套9外侧固定安装有位于第二腔体3内部的升降板8,所述第一腔体4内壁顶部固定安装有穿过第二腔体3的气缸5,所述气缸5输出轴与升降板8固定连接,所述承台11顶部固定安装有位于滑套9内部的降落伞7。所述第二箱体36顶部固定安装有第一支撑板18,所述第一转轴19穿过第一支撑板18并与其转动连接。
15.参照附图1、2、3、4、5:一种自适应降落无人机的使用方法,其步骤如下:一、起飞:启动电机21,电机21带动第一转轴19旋转,第一转轴19旋转带动第一滑动套31、第二滑动套41、第二蜗轮43旋转,第二蜗轮43旋转带动第四转轴17旋转,第四转轴17旋转后通过第五转轴39带动圆环板32旋转和圆弧环33,圆环板32和圆弧环33旋转时通过离心力回正,圆弧环33回正时推动顶板34上升,圆环板32回正推动第二顶杆22下降,顶板34上升推动第一顶杆45上升,第一顶杆45上升时通过圆台44的斜边推动圆台44移动,圆台44移动后带动第一滑动套31移动,第一滑动套31移动后通过第一弹簧47推动第二滑动套41移动至第二转轴37外侧,并将第一滑动键20滑入第二花键槽40内,以便于带动第二转轴37旋转,第二转轴37旋转时带动带动第一蜗轮38旋转,第一蜗轮38旋转带动第三转轴14旋转,第三转轴14旋转带动扇叶16旋转,使得无人机起飞;二、自适应降落:第二顶杆22下降时带动第一齿条23下降,第一齿条23下降带动第一齿轮24旋转,第一齿轮24旋转带动第二齿条10上升,第二齿条10上升带动卡板56通过通道60,此时如果电量耗尽时第一转轴19的输出动力减弱,进而导致圆弧环33和圆环板32复位,圆弧环33和圆环板32复位后第二滑动套41也在第二弹簧49的作用下复位,停止与第二转轴37接触,此时扇叶16停止旋转,防止无人机无规律飞行,随后第一滑板27上升,第一滑板27上升带动第一齿条23上升,第一齿条23上升带动第一齿轮24旋转,第一齿轮24旋转带动第二齿条10下降,第二齿条10下降使得滑块53推动压板51下降,压板51下降压动行程开关12,行程开关12被压动后带动气缸5伸长,气缸5伸长带动滑套9下降,释放出降落伞,进而使得无人机缓慢降落,防止摔坏,只有在两个行程开关12都被按动时气缸5才会被启动,因为无人机在转向时会减低某个扇叶的转速,在正常降落时需提前遥控关闭气缸5的开关,防止在正常降落时打开降落伞。
16.虽然本发明已通过参考优选的实施例进行了图示和描述,但是,本专业普通技术人员应当了解,在权利要求书的范围内,可作形式和细节上的各种各样变化。