1.本技术涉及无人机相关的领域,尤其是涉及一种可调节航摄仪拍摄角度的航测无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
3.目前市面上的无人机调整摄像头视角不够便捷,且摄像组件和无人机主体集成,模块化程度不高,从而使得无人机维修不够便捷。
4.针对上述中的相关技术,发明人认为存在有无人机摄像头视角调整不方便的缺陷。
技术实现要素:
5.为了改善无人机摄像头视角调整不方便的缺陷,本技术提供一种可调节航摄仪拍摄角度的航测无人机
6.本技术提供的一种可调节航摄仪拍摄角度的航测无人机采用如下的技术方案:
7.一种可调节航摄仪拍摄角度的航测无人机,包括机体和浆翼,其特征在于:所述机体下侧面开有插设空间,所述机体下侧设有拍摄装置,所述拍摄装置插设于所述机体,所述拍摄装置中设有用于调整拍摄角度的行星轮组件。
8.通过采用上述技术方案,通过行星轮组件实现了对无人机拍摄角度的调整。
9.优选的,所述拍摄装置包括拍摄外壳、动力组件,所述拍摄外壳下侧面设有弧形玻璃,拍摄装置上侧设有为拍摄装置提供动力的动力组件
10.通过采用上述技术方案,利用拍摄外壳来保护无人机的拍摄装置,能够在一定程度上延长无人机的使用寿命。
11.优选的,所述动力组件是伺服电机。
12.通过采用上述技术方案,伺服电机能够较为精准的控制输出的角度,使得拍摄过程中角度调整的精确性。
13.优选的,所述行星轮组件包括外圈、太阳轮、太阳轮轴,多个行星轮、行星架,所述行星架沿转动连接于拍摄外壳,所述外圈内啮合有多个所述行星轮,所述行星轮,所述外圈同轴设有多个,所述外圈外侧面固定连接于所述拍摄外壳内壁,所述拍摄外壳上侧壁中转动连接有用于与所述动力组件连接的花键连接块。
14.通过采用上述技术方案,达到外圈带动拍摄外壳转动的效果,使得拍摄时能够在水平面上进行角度调整。
15.优选的,所述插设空间周向内壁上设有用于约束外壳转动的外壳约束装置。
16.通过采用上述技术方案,通过限制拍摄外壳的转动,从而使得行星轮组件的外圈无法转动,从而使得行星轮自转的同时获得一个绕太阳轮公转的角速度,从而带动转轴转
动,从而能够在竖直平面上调整拍摄角度。
17.优选的,所述行星架包括轮架和转轴,所述轮架与所述转轴固定连接,所述转轴上周向开设有多个限位槽,所述拍摄外壳内壁中设有通过与所述限位槽配合实现对所述转轴固定的转轴约束装置。
18.通过采用上述技术方案,通过限制转轴的转动,从而使得行星轮组件的行星架无法转动,从而使得外圈带动拍摄外壳转动,从而能够在水平面上调整拍摄角度。
19.优选的,所述转轴下侧面设有锥齿轮组,锥齿轮组上安装有拍摄单元。
20.通过采用上述技术方案,拍摄单元能够通过安装在锥齿轮组上能够跟随锥齿轮和拍摄外壳转动,从而能够调整拍摄角度。
21.优选的,所述插设空间轴向内壁通过单向轴承转动连接有插盘,所述拍摄外壳上侧面设有插设于所述插盘的插块。
22.通过采用上述技术方案,通过单向轴承能够在安装拍摄外壳时,向单向轴承无法转动的一侧旋转插入,从而保持了插盘的固定,方便了拍摄装置的安装。
附图说明
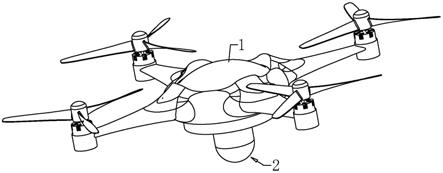
23.图1是本技术机体主体结构示意图。
24.图2是本技术中插盘零件图。
25.图3是本技术中拍摄装置主体结构示意图。
26.图4是本技术中拍摄装置主体结构全剖示意图。
27.图5是本技术中行星轮组结构示意图。
28.图6是本技术中行星架结构示意图。
29.图7是本技术外壳约束装置全剖结构示意图。
30.图8是本技术中花键连接块截面剖视图。
31.附图标记说明:1、机体;2、拍摄装置;21、拍摄外壳;22、弧形玻璃;23、限位槽;24、插块;3、行星轮组件;31、外圈;32、行星轮;33、太阳轮;34、太阳轮轴;35、行星架;351、轮架;352、转轴;36、花键连接块;41、第一锥齿轮;42、第二锥齿轮;5、伺服电机;6、摄像单元;71、插盘;72、插槽;81、约束块;82、约束弹簧;83、电磁铁。
具体实施方式
32.以下结合附图1-7对本技术作进一步详细说明。
33.本技术实施例公开一种可调节航摄仪拍摄角度的航测无人机。参照图1、图2和图3,可调节航摄仪拍摄角度的航测无人机包括机体1和浆翼,机体1下侧面开有插设空间,插设空间轴向内壁上通过单向轴承转动连接有插盘71,插盘71呈圆形,插盘71下侧面开设有三个关于插盘71圆心中心对称分布的插槽72,机体1中固定连接有伺服电机5,伺服电机下侧动力连接有花键轴。
34.参照图3和图4,插盘71通过三个插槽72可插设有拍摄装置2,拍摄装置2包括拍摄外壳21和插盘71,插盘71上侧面关于插盘71圆心中心对称分布有三个与插槽72配合的插块24。
35.参照图5和图7,拍摄外壳21上侧端面中转动连接有花键连接块36,花键轴能够插
入花键连接块36。
36.参照图4、图6和图7,拍摄外壳21下侧固定连接有弧形玻璃22,拍摄外壳21中设有传动空间,花键连接块36下侧面固定连接有太阳轮轴34,太阳轮轴34上固定连接有太阳轮33,拍摄外壳21内壁上固定连接有外圈31,且外圈31与太阳轮轴34同轴,外圈31内啮合有三个行星轮32,三个行星轮32同时与太阳轮33啮合,拍摄外壳21下侧面中转动连接有行星架35,行星架35包括轮架351和转轴352,轮架351固定连接于转轴352,转轴352转动连接于拍摄外壳21内壁,行星轮32转动连接于轮架351。
37.参照图7和图8,转轴352远离伺服电机5一端轴向开设有六个限位槽23,拍摄外壳21中设有转轴约束装置,转轴约束装置包括约束块81、约束弹簧82、电磁铁83,需要对转轴352进行约束时通过电磁铁83推动约束块81滑入限位槽23,从而达到限位的目的。
38.插设空间内壁也设有外壳约束装置,外壳约束装置与上述转轴352约束装置结构相同,拍摄外壳21周向开设有多个限位槽23。
39.参照图7,转轴352下侧面设有锥齿轮组,锥齿轮组包括第一锥齿轮41和第二锥齿轮42,第一锥齿轮41固定连接于转轴352下侧端面,第二锥齿轮42转动连接于拍摄外壳21内壁,第一锥齿轮41于第二锥齿轮42互相啮合。
40.第二锥齿轮42齿面上安装有拍摄单元。
41.本技术实施例一种可调节航摄仪拍摄角度的航测无人机的实施原理为:当需要安装拍摄装置2时,将拍摄外壳21上侧面的插块24插入插槽72并向单向轴承无法转动的方向转动拍摄外壳21,插入的同时将花键轴插入花键连接块36,从而使得插块24旋入插槽72并固定。
42.需要调整水平面上的拍摄角度时,控制转轴约束装置中的电磁铁83使得约束块81弹出,并滑入转轴352上的限位槽23,从而使得转轴352无法转动,打开伺服电机5,使得太阳轮33转动,从而使得行星轮32转动带动外圈31转动,从而带动拍摄外壳21转动,实现了摄像单元6的水平转动。
43.需要调整竖直面上的拍摄角度时,控制外壳约束装置中的电磁铁83使得约束块81弹出,并滑入拍摄外壳21上的限位槽23,从而使得拍摄外壳21无法转动,从而使得外圈31无法转动,打开伺服电机5,使得太阳轮33转动,由于外圈31无法转动,从而使得行星轮32自转的同时获得一个绕太阳轮33公转的角速度,从而带动转轴352转动,实现了摄像单元6的竖直转动。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。