1.本技术涉及无人机的领域,尤其是涉及一种垂直起降无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇性自主的操作。
3.现有的无人机尾翼多与无人机主体采用固定连接的形式,针对上述中的相关技术,发明人认为在无人机装箱运输时,尾翼占用空间相对较广且尾翼的结构强度相对无人机主体较低,这样在装箱运输过程中尾翼可能发生损坏。
技术实现要素:
4.为了改善无人机尾翼可能发生损坏的问题,本技术提供一种垂直起降无人机。
5.本技术提供的一种垂直起降无人机采用如下的技术方案:
6.一种垂直起降无人机,包括机身和机翼,所述机翼的底部设置有机臂,所述机臂上设置有用于提供升降动力的升降旋浆,所述机身尾部设置有用于提供推进动力的推进旋浆,所述机身后方设置有尾翼,所述尾翼包括连接管,所述连接管与机臂同轴设置,所述连接管靠近机臂的端部周壁上设置有外螺纹;所述机臂靠近连接管的端部活动套设有具有内螺纹的螺帽,所述螺帽为一端开口的筒体结构,所述螺帽的开口端朝向连接管,所述机臂端部还套设固接有用于限制螺帽脱离机臂的第一挡环,所述第一挡环的外径小于螺帽的内径,所述螺帽与连接管螺纹连接。
7.通过采用上述技术方案,当需要装箱运输无人机时,工作人员可旋拧螺帽,使螺帽脱离连接管,将连接管从机臂上抽出,从而拆卸下尾翼,将尾翼单独装箱运输,从而有效改善了尾翼发生损坏的问题。
8.可选的,所述机臂端部周壁上周向设置有若干个插键,所述插键位于第一挡环靠近连接管的一侧,所述连接管内壁上开设有与插键配合的插槽,所述插键可拆卸插设于插槽内。
9.通过采用上述技术方案,插键与插槽配合用于限制连接管相对机臂转动,从而提升了连接管与机臂连接处的稳定性。
10.可选的,所述机臂上套设固接有第二挡环,所述第二挡环位于第一挡环远离连接管的一侧,所述螺帽的活动范围为第一挡环与第二挡环之间。
11.通过采用上述技术方案,第二挡环用于配合第一挡环限定螺帽的活动范围,从而方便工作人员将螺帽安装在连接管上。
12.可选的,所述尾翼包括至少两个翼片板,所述连接管设置于翼片板上,所述翼片板的端部还设置有连接耳板,相邻两个翼片板的连接耳板之间通过一连接销固定。
13.通过采用上述技术方案,可以进一步将尾翼拆卸成翼片板,然后将翼片板分开装箱,提升了尾翼的安全性。
14.可选的,所述机身底部设置有呈半圆弧形的支腿,所述支腿的弧形开口朝向背离机身的一侧,所述支腿与机身固接。
15.通过采用上述技术方案,支腿用于将无人机支撑在地面上,使无人机主体远离地面,减少对无人机主体的损坏。
16.可选的,所述支腿与机身焊接或通过一螺丝连接。
17.通过采用上述技术方案,支腿与机身的连接方式多样,可根据实际情况采取不同的连接方式。
18.可选的,所述支腿端部设置有支撑底板,所述支撑底板远离支腿的一侧设置有缓冲垫。
19.通过采用上述技术方案,有利于缓冲无人机降落时的冲击力。
20.可选的,所述支撑底板背离缓冲垫的一侧固接有支撑耳板,所述支撑耳板与支腿通过一转轴铰接。
21.通过采用上述技术方案,可使无人机适应更多地形的降落需求。
22.可选的,所述机身底部连接有若干个挂环。
23.通过采用上述技术方案,可在无人机下方通过挂钩悬挂货仓,提升无人机的用途。
24.可选的,所述挂环与机身之间设置有定位螺钉,所述定位螺钉包括同轴依次固接的螺杆部、第一旋钮部、光杆部、第二旋钮部,所述螺杆部螺纹连接于机身内,所述挂环套设于光杆部上。
25.通过采用上述技术方案,第一旋钮部和第二旋钮部可供工作人员使用扳手旋拧,便于挂钩的安装和拆卸。
26.综上所述,本技术包括以下至少一种有益技术效果:
27.1.需要装箱运输无人机时,工作人员可旋拧螺帽,使螺帽脱离连接管,将连接管从机臂上抽出,从而拆卸下尾翼,将尾翼单独装箱运输,从而有效改善了尾翼发生损坏的问题;
28.2.插键与插槽配合用于限制连接管相对机臂转动,从而提升了连接管与机臂连接处的稳定性;
29.3.可在无人机下方通过挂钩悬挂货仓,提升无人机的用途。
附图说明
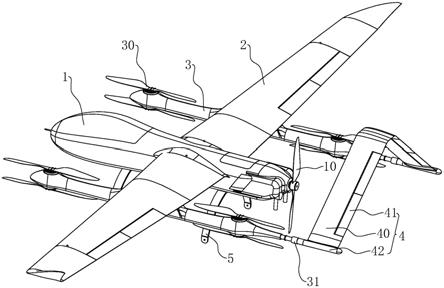
30.图1是本技术实施例1的一种垂直起降无人机的结构示意图。
31.图2是图1中无人机的后视图。
32.图3是图2中a部分的放大示意图。
33.图4是为展示机臂与连接管连接关系所做的爆炸图。
34.图5是本技术实施例2的一种垂直起降无人机的结构示意图。
35.图6是图5中b部分的放大示意图。
36.图7是图5中c部分的放大示意图。
37.图8是为展示定位螺钉与挂环配合关系所做的示意图。
38.附图标记说明:1、机身;10、推进旋浆;2、机翼;3、机臂;30、升降旋浆;31、螺帽;32、第一挡环;33、第二挡环;34、插键;4、尾翼;40、翼片板;400、连接耳板;401、连接销;41、副翼
板;42、连接管;5、支腿;50、支撑耳板;51、转轴;52、支撑底板;53、缓冲垫;6、挂环;60、定位螺钉;600、螺杆部;601、第一旋钮部;602、光杆部;603、第二旋钮部。
具体实施方式
39.以下结合附图1-8对本技术作进一步详细说明。
40.实施例1
41.本技术实施例公开一种垂直起降无人机。参照图1,一种垂直起降无人机,包括机身1、机翼2、机臂3和尾翼4。
42.参照图1和图2,在机身1的尾端安装有用于提供推进动力的推进旋浆10,机翼2设置有两个且两个机翼2分别对称安装于机身1的两侧,机翼2的长度方向与机身1的长度方向垂直;机臂3设置有两个,两个机臂3分别安装于两个机翼2的下方,机臂3的长度方向与机身1的长度方向平行,在机臂3的两端分别安装有一对升降旋浆30,升降旋浆30用于提供无人机垂直起飞的动力。
43.参照图2和图3,尾翼4安装于两个机臂3靠近推进旋浆10的一端,尾翼4呈v形,其包括两个交叉设置的翼片板40,在两个翼片板40相互靠近的一端分别固接有一连接耳板400,两个连接耳板400通过一连接销401固定,从而实现两个翼片板40的拼接固定。
44.参照图1和图2,在每个翼片板40远离推进旋浆10的一侧还分别铰接有两个副翼板41,副翼板41用于调节风向;在每个翼片板40远离连接耳板400的一端均固接有一连接管42,连接管42与机臂3同轴设置。
45.参照图1和图4,在机臂3靠近连接管42的端部活动套设有螺帽31,螺帽31为一端开口的筒体结构,螺帽31的开口端朝向连接管42,螺帽31内壁上设置有内螺纹,相应的,连接管42靠近机臂3的端部设置有外螺纹,螺帽31与连接管42螺纹连接,机臂3端部插设于连接管42内。
46.在机臂3靠近连接管42的端部套设固接有第一挡环32和第二挡环33,第一挡环32位于第二挡环33靠近连接管42的一侧,螺帽31的移动范围在第一挡环32与第二挡环33之间,第一挡环32的外径小于螺帽31的内径,第一挡环32用于限制螺帽31脱离机臂3,第二挡环33用于限制螺帽31的移动范围。
47.参照图4,为了减少连接管42和机臂3因振动而相对旋转的可能性,在机臂3端部的外周壁上周向均匀固接有四个插键34,插键34的长度方向与机臂3的长度方向平行,插键34位于第一挡环32背离第二挡环33的一侧;相应的,在连接管42内周壁上周向开设有四个与插键34适配的插槽,插键34可拆卸插设于插槽内。
48.参照图1和图2,在机身1底部沿机身1的长度方向设置有两个支腿5,支腿5呈半圆弧形且弧形开口朝向背离机身1的一侧,支腿5用于支撑无人机;本实施例中的支腿5焊接固定于机身1底部,在其他示例中,支腿5还可以通过螺丝等常用紧固件固定在机身1底部。
49.本技术实施例1的实施原理为:当无人机需要装箱运输时,工作人员可旋拧螺帽31,使螺帽31脱离连接管42,随后将连接管42从机臂3上拔出,从而可使尾翼4脱离机臂3,将尾翼4单独装箱运输,减少了尾翼4损坏的可能性;还可将连接销401从两个连接耳板400中拔出,使两个翼片板40分离,从而更加方便尾翼4的存放。
50.实施例2
51.参照图5和图6,本实施例与实施例1的区别在于,为了使无人机降落时更加平稳,在每个支腿5的两端分别设置有两个支撑耳板50,两个支撑耳板50与支腿5之间通过一转轴51铰接,两个支撑耳板50竖向平行设置;在两个支撑耳板50的底端垂直焊接有一支撑底板52,在支撑底板52背离支撑耳板50的一侧粘结有缓冲垫53,本实施例中的缓冲垫53为橡胶垫,且在缓冲垫53背离支撑底板52的一侧设置有防滑纹。
52.参照图5和图7,为了便于无人机携带货物,在机身1底部设置有四个呈矩阵布设的挂环6,四个挂环6位于两个支腿5之间。
53.参照图7和图8,在挂环6与机身1之间连接有一定位螺钉60,定位螺钉60包括同轴依次设置的螺杆部600、第一旋钮部601、光杆部602和第二旋钮部603;螺杆部600螺纹连接于机身1底部,第一旋钮部601呈正六棱柱状且固接于螺杆部600远离机身1的一端,光杆部602固接于第一旋钮部601远离螺杆部600的一端,第二旋钮部603呈正六棱柱状且固接于光杆部602远离第一旋钮部601的一端;挂环6套设于光杆部602上,且可沿光杆部602周向旋转,第二旋钮部603用于限制挂环6脱离光杆部602。
54.本技术实施例2的实施原理为:无人机降落时,缓冲垫53着地从而缓冲下落的冲击力,支撑耳板50与支腿5铰接,从而适应更多地形;工作人员可将货物捆扎后,通过挂钩钩挂在挂环6上,从而使用无人机携带货物,提升无人机的适用范围。
55.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。