一种全自动ar摄像装置
技术领域
1.本实用新型涉及室内设计技术领域,具体为一种全自动ar摄像装置。
背景技术:
2.ar即增强现实是一种通过计算摄影机摄像的位置以及角度精算并结合图像分析技术,这种技术的目的是在计算机屏幕上能够与现实世界场景进行结合与互动的技术。ar即增强现实技术,不仅展现了真实世界的信息,而且将虚拟的信息同时显示出来,两种信息相互补充、叠加。在视觉化的增强现实中,用户利用头盔显示器,把真实世界与电脑图形多重合成在一起,便可以看到真实的世界围绕着它。因此利用ar即增强现实技术,用户可以通过虚拟现实的技术实现各个领域的需求,例如在医疗研究与解剖训练、精密仪器制造和维修、军用飞机导航、工程设计和远程机器人控制等领域。
3.伴随着建筑事业的蓬勃发展,人们对自己居住的室内环境以及设计风格要求的需求逐渐增加。对于一些高档的室内装潢设计,设计师需要对室内实际使用面积进行严密的评估和考虑其采光系统,再以室内实际使用面积和采光系统考虑家电设备的合理组合,甚至是颜色搭配等等问题,而原有的技术设计体验单一,无法真实展现室内设计样貌,导致设计呈现效果与实际装修成果不符,因此通过设计一种全自动ar摄像装置,对设计前室内实际使用面积和采光系统进行多角度拍摄,使后续实际装修成果与前期设计呈现效果一致,满足人们的设计需求。
技术实现要素:
4.本实用新型的目的在于针对上述的不足,提供一种能自动对室内实际使用面积和采光系统进行充分拍摄,使室内设计的实际装修成果与设计呈现效果一致,满足了人们的室内设计需求的全自动ar摄像装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种全自动ar摄像装置,包括无人机本体,通讯联网的控制器,活动设置于所述无人机本体下方的安装座,用于驱动所述安装座移动的电动调节架,所述安装座上设置有摄像头和光线传感器,所述控制器设置于所述无人机本体内部,所述电动调节架的顶端固定连接在所述无人机本体上,所述电动调节架、摄像头和光线传感器均电性连接所述控制器。
7.进一步,所述电动调节架包括升降组件、前后组件和旋转组件,所述升降组件的顶端固定连接所述无人机本体,所述升降组件的输出端朝下驱动连接所述前后组件,所述前后组件的输出端驱动连接所述旋转组件,所述旋转组件驱动连接所述安装座。
8.进一步,所述升降组件包括输出端竖直朝下设置的电动伸缩杆,设置于所述电动伸缩杆活塞杆杆头上的升降座。
9.进一步,所述前后组件包括设置于所述升降座中的前后步进电机,前后步进电机的输出轴穿出所述升降座的一侧驱动连接有前后杆。
10.进一步,所述旋转组件包括设于所述前后杆底端的前后座,安装在所述前后座底
部的旋转步进电机,所述旋转步进电机的输出端竖直朝下伸出驱动连接所述安装座。
11.本实用新型的有益效果是:
12.实际应用中,通过控制器联网,在控制器中录入室内户型图图纸,无人机本体沿室内户型图飞行过程中,通过摄像头拍摄室内的实际使用面积视频,并将拍摄结果发送到控制器中,同时通过光线传感器对室内各个方向的自然光亮度进行采集,并将采集结果发送到控制器;通过电动调节架调整安装座上摄像头和光线传感器的高度和角度,使摄像头和光线传感器能充分对室内实际使用面积和采光系统进行拍摄采集;本实用新型能自动对室内实际使用面积和采光系统进行充分拍摄,使室内设计的实际装修成果与设计呈现效果一致,满足了人们的室内设计需求。
附图说明
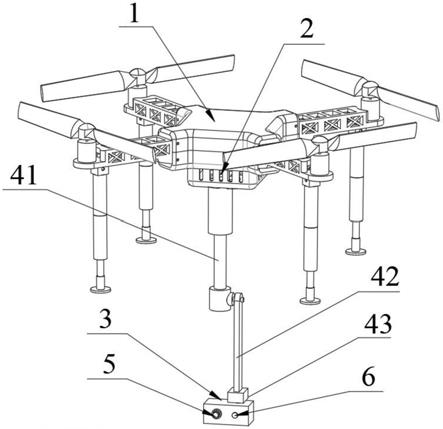
13.图1是本实用新型的整体结构示意图;
14.图2是本实用新型中电动调节架的结构示意图;
15.附图标记:无人机本体1;控制器2;安装座3;升降组件41;电动伸缩杆411;升降座412;前后组件42;前后步进电机421;前后杆422;旋转组件43;前后座431;旋转步进电机432;摄像头5;光线传感器6。
具体实施方式
16.如图1和图2所示,一种全自动ar摄像装置,包括无人机本体1,通讯联网的控制器2,活动设置于所述无人机本体1下方的安装座3,用于驱动所述安装座3移动的电动调节架,所述安装座3上设置有摄像头5和光线传感器6,所述控制器2设置于所述无人机本体1内部,所述电动调节架的顶端固定连接在所述无人机本体1上,所述电动调节架、摄像头5和光线传感器6均电性连接所述控制器2。
17.使用时,通过控制器2联网,在控制器2中录入室内户型图图纸,无人机本体1沿室内户型图飞行过程中,通过摄像头5拍摄室内的实际使用面积视频,并将拍摄结果发送到控制器2中,同时通过光线传感器6对室内各个方向的自然光亮度进行采集,并将采集结果发送到控制器2;通过电动调节架调整安装座3上摄像头5和光线传感器6的高度和角度,使摄像头5和光线传感器6能充分对室内实际使用面积和采光系统进行拍摄采集;本实用新型能自动对室内实际使用面积和采光系统进行充分拍摄,使室内设计的实际装修成果与设计呈现效果一致,满足了人们的室内设计需求。
18.如图1和图2所示,所述电动调节架包括升降组件41、前后组件42和旋转组件43,所述升降组件41的顶端固定连接所述无人机本体1,所述升降组件41的输出端朝下驱动连接所述前后组件42,所述前后组件42的输出端驱动连接所述旋转组件43,所述旋转组件43驱动连接所述安装座3;本实施例中,通过升降组件41调整前后组件42的高度,通过前后组件42调整旋转组件43的前后位置,通过旋转组件43调整安装座3上摄像头5和光线传感器6的高度和角度。
19.如图1和图2所示,所述升降组件41包括输出端竖直朝下设置的电动伸缩杆411,设置于所述电动伸缩杆411活塞杆杆头上的升降座412;本实施例中,通过电动伸缩杆411活塞杆杆头伸缩,调整升降座412上安装的前后组件42的高度,使摄像头5和光线传感器6能拍摄
不同高度的视频和检测不同高度光线亮度。
20.如图1和图2所示,所述前后组件42包括设置于所述升降座412中的前后步进电机421,前后步进电机421的输出轴穿出所述升降座412的一侧驱动连接有前后杆422;本实施例中,通过前后步进电机421驱动前后杆422旋转,调整旋转组件43的前后位置,使旋转组件43能伸入无人机本体1无法进入的窗台或阳台进行拍摄和检测,让摄像头5和光线传感器6能自动对室内实际使用面积和采光系统进行充分拍摄。
21.如图1和图2所示,所述旋转组件43包括设于所述前后杆422底端的前后座431,安装在所述前后座431底部的旋转步进电机432,所述旋转步进电机432的输出端竖直朝下伸出驱动连接所述安装座3;本实施例中,通过前后座431安装旋转步进电机432,旋转步进电机432驱动安装座3旋转,调整安装座3上摄像头5和光线传感器6的水平拍摄方向,使摄像头5和光线传感器6能自动对室内实际使用面积和采光系统进行充分拍摄,让室内设计的实际装修成果与设计呈现效果一致,满足了人们的室内设计需求。
22.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神所定义的范围。