一种火星edl过程大动态导航试验验证系统及方法
技术领域
1.本发明涉及一种火星edl过程大动态导航试验验证系统及方法,属于导航技术领域。
背景技术:
2.火星探测任务的进入、降落与着陆段(entry,descent,and landing,简称edl)是火星探测器近7亿千米旅途的最后6、7分钟,是火星表面探测任务的关键阶段,也是最困难的阶段。edl技术也是火星表面探测任务的关键技术之一。从火星探测器以2万千米每小时的速度进入火星大气开始,经历大气减速,降落伞拖拽,动力下降等一系列的阶段,而这期间仅能使用imu进行惯性导航,惯性导航中对姿态的估计全程无其他测量可以进行修正,一旦姿态估计误差过大会导致着陆器坠毁,因此火星edl过程惯性导航的性能尤其是姿态估计的精度是决定火星软着陆任务成功的关键因素。在以往嫦娥系列月球软着陆过程中,探测器的姿态运动相对比较平稳,干扰少,imu工作环境比较理想,因此只需做静态导航试验即可验证月球着陆过程惯性导航的性能。而相比较月球着陆过程,火星edl过程的动态极大,特别是伞降段角速度震荡剧烈,甚至会导致陀螺饱和,而且整个过程imu受到的干扰多,工作环境恶劣,因此需要通过模拟火星edl大动态过程的姿态运动来验证基于imu的惯性导航的可靠性和有效性。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提供了一种火星edl过程大动态导航试验验证系统及方法,试验系统采用机械转台携带imu敏感器通过姿态映射方法模拟火星着陆器edl过程的真实姿态运动,利用机械转台实际输出数据和imu采集的数据可对惯性导航的关键技术及相关性能进行有效验证和评估,具有试验方法简单、易实现、可靠性高、针对性强等特点。
4.本发明的技术解决方案是:一种火星edl过程大动态导航试验验证系统,包括数学仿真计算机、imu模块及其数据采集设备、三轴机械转台及其控制计算机、星载计算机、地面计算机;
5.数学仿真计算机,构建用于模拟火星edl全过程着陆器的姿态运动的姿态动力学模型,实时计算火星edl过程着陆器的姿态变化数据,并通过数据接口模块将其发送给机械转台控制计算机;
6.三轴机械转台控制计算机,根据接收到的火星edl过程着陆器的姿态变化数据生成三轴机械转台控制指令,并发送至三轴机械转台;
7.三轴机械转台,携带imu模块,按三轴机械转台控制指令进行三轴转动;imu模块固定安装在三轴机械转台上,跟随三轴机械转台转动,测量角速度信息,并将采集到的角速度信息发送给星载计算机和地面计算机;
8.星载计算机,根据角速度信息进行惯性导航解算,输出惯导解算的的姿态信息;
9.地面计算机,根据角速度信息进行导航解算,将角速度信息转换为imu模块相对地理系的姿态,通过与惯导解算的的姿态信息进行比较得到惯导定姿误差,实现星上惯性导航的试验验证。
10.进一步地,所述三轴机械转台控制计算机首先通过数据接口模块接收数学仿真计算机发送过来的初始姿态控制机械转台完成初始姿态对准;然后三轴机械转台通过跟踪数学仿真计算机实时发送的三轴角速度实现火星edl过程姿态跟踪,姿态跟踪过程中通过转台配套测试设备按预设的采样周期采集记录转台三轴的角速度和姿态角,并将采集的数据发送给地面计算机。
11.进一步地,根据和计算得到imu在试验初始t0时刻的位置、速度和姿态,完成初始对准;其中,为试验初始t0时刻转台处在零位时imu测量坐标系相对惯性参考系的转换阵,为imu测量坐标系相对imu基准坐标系的转换阵,为转台处在零位时imu基准坐标系相对转台基准坐标系的转换矩阵,为转台基准坐标系相对试验场地天东北地理系的转换矩阵,c
nf
为地固系到天东北地理系的姿态阵,c
fi
为惯性系到地固系的姿态阵,r为试验场地的地心距,r为试验场地当地的地球参考椭球半径,h为试验场地的高程,r
e
、r
p
为地球参考椭球的半长轴和半短轴,l
c
为试验场地的地心纬度。
12.进一步地,所述惯性导航解算包括如下步骤:
13.利用接收到的imu模块测量数据进行惯导外推解算;
14.将惯性导航解算出的得到imu模块相对惯性系的姿态以及惯性系下的位置和速度转换到天东北地理系下,完成惯性导航解算。
15.进一步地,所述姿态动力学模型根据imu模块的实际安装,输出火星edl过程imu模块测量坐标系相对于惯性系的三轴角速度信息,三轴机械转台控制计算机根据imu模块与三轴机械转台的安装关系及接收自数学仿真计算机给出的imu测量坐标系相对于惯性系的三轴角速度计算三轴机械转台转动指令,并驱动三轴机械转台转动,模拟火星edl过程姿态的运动。
16.进一步地,所述姿态动力学模型中,火星edl过程姿态动力学方程为其中:i
s
为转动惯量;ω为探测器相对于惯性系的角速度;μ
r
为气动力矩;μ
c
为发动机产生的力矩;μ
d
为干扰力矩;μ
la
为伞绳的拉力力矩。
17.根据所述的一种火星edl过程大动态导航试验验证系统实现的火星edl过程大动态导航试验验证方法,包括如下步骤:
18.构建用于模拟火星edl全过程着陆器的姿态运动的姿态动力学模型,实时计算火星edl过程着陆器的姿态变化数据,并通过数据接口模块将其发送给机械转台控制计算机;
19.三轴机械转台控制计算机根据接收到的火星edl过程着陆器的姿态变化数据生成三轴机械转台控制指令,并发送至三轴机械转台;
20.三轴机械转台上的imu模块,按三轴机械转台控制指令进行三轴转动;imu模块固
定安装在三轴机械转台上,跟随三轴机械转台转动,测量角速度信息,并将采集到的角速度信息发送给星载计算机和地面计算机;
21.星载计算机根据角速度信息进行惯性导航解算,输出惯导解算的的姿态信息;
22.地面计算机根据角速度信息进行导航解算,将角速度信息转换为imu模块相对地理系的姿态,通过与惯导解算的的姿态信息进行比较得到惯导定姿误差,实现星上惯性导航的试验验证。
23.进一步地,所述三轴机械转台控制计算机首先通过数据接口模块接收数学仿真计算机发送过来的初始姿态控制机械转台完成初始姿态对准;然后三轴机械转台通过跟踪数学仿真计算机实时发送的三轴角速度实现火星edl过程姿态跟踪,姿态跟踪过程中通过转台配套测试设备按预设的采样周期采集记录转台三轴的角速度和姿态角,并将采集的数据发送给地面计算机;
24.根据和计算得到imu在试验初始t0时刻的位置、速度和姿态,完成初始对准;其中,为试验初始t0时刻转台处在零位时imu测量坐标系相对惯性参考系的转换阵,为imu测量坐标系相对imu基准坐标系的转换阵,为转台处在零位时imu基准坐标系相对转台基准坐标系的转换矩阵,为转台基准坐标系相对试验场地天东北地理系的转换矩阵,c
nf
为地固系到天东北地理系的姿态阵,c
fi
为惯性系到地固系的姿态阵,r为试验场地地心距,r为试验场地当地的地球参考椭球,h为试验场地的高程,r
e
、r
p
为地球参考椭球的半长轴和半短轴,l
c
为试验场地的地心纬度;
25.所述惯性导航解算包括如下步骤:
26.利用接收到的imu模块测量数据进行惯导外推解算;
27.将惯性导航解算出的得到imu模块相对惯性系的姿态以及惯性系下的位置和速度转换到天东北地理系下,完成惯性导航解算;
28.所述姿态动力学模型根据imu模块的实际安装,输出火星edl过程imu模块测量坐标系相对于惯性系的三轴角速度信息,三轴机械转台控制计算机根据imu模块与三轴机械转台的安装关系及接收自数学仿真计算机给出的imu测量坐标系相对于惯性系的三轴角速度计算三轴机械转台转动指令,并驱动三轴机械转台转动,模拟火星edl过程姿态的运动;
29.所述姿态动力学模型中,火星edl过程姿态动力学方程为其中:i
s
为转动惯量;ω为探测器相对于惯性系的角速度;μ
r
为气动力矩;μ
c
为发动机产生的力矩;μ
d
为干扰力矩;μ
la
为伞绳的拉力力矩。
30.一种计算机可读存储介质,所述的计算机可读存储介质存储有计算机程序,所述的计算机程序被处理器执行时实现所述一种火星edl过程大动态导航试验验证方法的步骤。
31.一种火星edl过程大动态导航试验验证设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述的处理器执行所述的计算机程序时
实现所述一种火星edl过程大动态导航试验验证方法的步骤。
32.本发明与现有技术相比的优点在于:
33.(1)本发明试验系统通过数学闭环仿真系统实时获取火星edl过程的姿态角和角速度信息,并利用该姿态信息驱动携带imu敏感器的三轴机械转台转动来模拟火星着陆器edl过程的真实姿态运动,利用机械转台实际输出数据和imu采集的数据可对惯性导航的关键技术及相关性能进行有效验证和评估,具有试验方法简单、易实现、可靠性高、针对性强等特点。
34.(2)本发明设计了一种火星edl过程大动态导航试验验证系统,实现了火星edl过程进入舱气动减速、弹伞、伞降、抛大底、抛背罩等复杂动力学过程中大范围姿态运动的高精度模拟,为火星edl过程基于imu的惯性导航算法验证和性能评估奠定了基础。;
35.(3)本发明设计了火星edl过程大动态导航试验验证方法,给出了动态导航试验过程位姿映射方法和惯性导航性能评估方法,实现了对惯性导航算法的有效性验证和性能评估。
附图说明
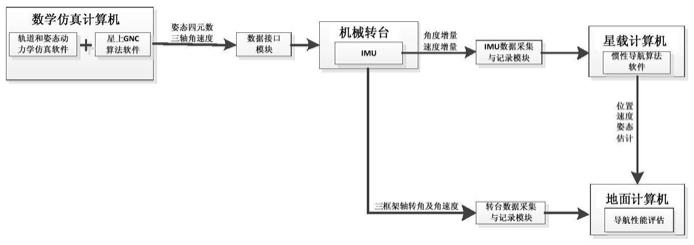
36.图1为本发明火星edl过程大动态导航试验验证系统组成示意图。
具体实施方式
37.为了更好的理解上述技术方案,下面通过附图以及具体实施例对本技术技术方案做详细的说明,应当理解本技术实施例以及实施例中的具体特征是对本技术技术方案的详细的说明,而不是对本技术技术方案的限定,在不冲突的情况下,本技术实施例以及实施例中的技术特征可以相互组合。
38.以下结合说明书附图对本技术实施例所提供的一种火星edl过程大动态导航试验验证系统及方法做进一步详细的说明,具体实现方式可以包括(如图1~所示):
39.试验系统由数学仿真计算机、imu及其数据采集设备、三轴机械转台及其控制计算机、星载计算机及星上惯性导航算法软件、地面计算机及地面导航性能评估软件组成。
40.其中数学仿真计算机通过建立火星edl过程动力学模型、敏感器测量模型、执行机构模型和星上gnc算法建立全数学仿真模拟火星edl全过程着陆器的姿态运动,实时给出火星edl过程着陆器的姿态变化,包括着陆器本体系相对惯性系的姿态四元数和角速度,并通过数据接口模块将其发送给机械转台控制计算机。
41.其中,三轴机械转台携带imu按机械转台控制计算机指令进行三轴转动。机械转台控制计算机首先通过数据接口模块接收数学仿真计算机发送过来的初始姿态控制机械转台完成初始姿态对准;然后三轴转台通过跟踪数学仿真计算机发送过来的三轴角速度实现火星edl过程姿态跟踪,姿态跟踪过程中通过转台配套测试设备按预设的采样周期采集记录转台三轴的角速度和姿态角,并将采集的数据发送给地面计算机。
42.imu通过工装牢固安装在机械转台上,其跟随三轴转台转动,测量转动角速度,并将采集到的角速度信息发送给星载计算机。
43.星载计算机利用imu采集的数据运行星上惯性导航算法软件。惯性导航算法软件利用接收到的imu测量数据进行惯导外推解算。然后将惯性导航解算出的得到imu相对惯性
系的姿态以及惯性系下的位置和速度转换到天东北地理系下,由于imu相对地理系的位置速度真值为零,因此导航解算的位置和速度估计值即为导航误差值。
44.地面计算机利用机械转台输出的数据运行地面解算软件,将转台输出的转角转换为imu相对地理系的姿态,通过与惯导解算的姿态进行比较可得到惯导定姿误差,实现考核星上惯性导航的性能的功能。
45.火星edl过程姿态动力学仿真模拟方法
46.通过建立火星edl过程着陆器的姿态动力学模型,给出火星edl过程姿态运动的高仿真度模拟,根据imu的实际安装输出火星edl过程imu测量坐标系相对于惯性系的三轴角速度信息,机械转台控制计算机根据imu与转台的安装关系及接收自数学仿真计算机给出的imu测量坐标系相对于惯性系的三轴角速度计算出三轴机械转台转动指令,并驱动三轴机械转台转动来真实模拟火星edl过程姿态的运动。
47.动态导航试验过程位姿映射方法
48.通过定义当地固连坐标系、惯性参考系,并外测确定三轴机械转台基准坐标系相对当地天东北地理坐标系的转换阵、初始时刻imu基准坐标系相对转台零位坐标系的转换阵等可建立导航试验初始时刻imu测量坐标系相对惯性参考系的初始姿态;另一方面根据当地经纬度及地固系与惯性参考系的关系可计算得到初始时刻imu在惯性系的位置和初始速度;一旦建立imu测量坐标系的初始姿态和初始位置、速度后,可根据imu的角速度及加速度测量利用星上惯性导航外推算法得到试验过程中imu相对惯性参考系的姿态和位置、速度,再由惯性参考系与当地天东北地理系之间的转换关系可得到imu测量坐标系相对当地天东北系的姿态和位置、速度,从而完成动态导航试验过程的位姿映射
49.edl过程动态导航性能评估方法
50.通过外测得到的试验初始时刻imu与机械转台的安装关系、机械转台与当地天东北地理系的关系以及转台三轴转动的框架角度可计算得到动态导航试验过程中imu测量坐标系相对当地天东北系的姿态。以通过转台转动角度获取的imu测量坐标系相对当地天东北系的姿态为基准,比较其与通过姿态映射方法得到的imu姿态可对星上惯性导航的姿态估计性能进行评估;另一方面由于试验起始和结束时刻imu相对当地天东北地理系的位置不变且速度为0,因此导航解算的位置和速度估计值即为导航误差值,据此完成星上惯性导航位置估计的性能评估。
51.在本技术实施例所提供的方案中,一种火星edl过程大动态导航试验验证方法具体包括如下步骤:
52.第一步,动态导航试验初始对准
53.定义当地固连坐标系z轴指向地球自转轴,x轴指向试验场所所在的经度子午线,y轴与x、z轴构成右手直角坐标系,其随地球一起自转;定义惯性坐标系与试验起始时刻瞬时的地固系相同,其为惯性固定坐标系,不随地球自转;天东北地理坐标系其随地球一起自转;转台坐标系为转台基准坐标系为imu基准坐标系为其随转台一起转动;imu三轴敏感轴组成的测量坐标系为其随转台一起转动。
54.地固系到天东北地理系的姿态阵c
nf
:通过主轴旋转获得
55.c
nf
=c
y
(
‑
l)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
56.式中,c
y
()为绕y轴主轴旋转,l为地理纬度。
57.惯性系到地固系的姿态阵c
fi
的通过主轴旋转获得
58.c
fi
=c
z
(ωδt)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
59.式中,c
z
()为绕z轴主轴旋转;ω为地球自转角速度;δt=t
‑
t0为相对试验初始时刻时间,t0时刻c
fi
为单位阵。
60.通过外部场地测量确定转台基准坐标系相对试验场地天东北地理系的转换矩阵和转台处在零位时imu基准坐标系相对转台基准坐标系的转换矩阵则可计算得到试验初始t0时刻转台处在零位时imu基准坐标系相对地天东北地理系的转换阵
[0061][0062]
进而可得到试验初始t0时刻转台处在零位时imu测量坐标系相对惯性参考系的转换阵
[0063][0064]
则试验初始t0时刻转台处在零位时imu测量坐标系相对地天东北地理系的姿态四元数q0[0065][0066]
其中aq()表示由姿态矩阵到姿态四元数的转换函数。
[0067]
试验场地地心距r计算公式如下
[0068]
r=r+h
[0069][0070]
其中,h为试验场地的高程;r
e
和r
p
为地球参考椭球的半长轴和半短轴。
[0071]
验初始t0时刻imu在惯性参考系的位置r
i,0
和速度v
i,0
按下式计算得到
[0072]
r
i,0
=r[cosl
c 0 sinl
c
]
[0073]
v
i,0
=ω
f
×
r
i,0
[0074]
(7)
[0075]
其中l
c
为试验场地的地心纬度;ω
f
=[0 0 1]
t
为地球自转矢量在地固系中投影。
[0076]
根据式(4)和(6)计算得到imu在试验初始t0时刻的位置、速度和姿态,完成初始对准。
[0077]
第二步,火星edl过程姿态动力学模拟
[0078]
火星edl过程姿态动力学方程如下:
[0079][0080]
其中:i
s
为转动惯量;ω为探测器相对于惯性系的角速度;μ
r
为气动力矩,可根据大气模型及探测器的位置、速度和姿态计算得到;μ
c
为发动机产生的力矩,根据星上gnc算法给出的发动机控制指令及发动机模型给出;μ
d
为干扰力矩,主要包括抛大底、抛背罩等
过程产生的力矩,由抛大底、抛背罩过程的模型给出;μ
la
为伞绳的拉力力矩,由伞动力学模型给出。
[0081]
根据imu的实际安装可将探测器角速度ω转换为imu测量坐标系相对惯性系的角速度ω
s
=c
sb
ω,其中c
sb
为imu在探测器中的安装矩阵。
[0082]
根据上述姿态动力学模型给出火星edl过程中气动减速、弹伞、伞降、抛大底、抛背罩等复杂动力学过程中大范围姿态运动的高精度角速度模拟,并将其实时发送给三轴机械转台控制计算机。
[0083]
第三步,火星edl过程动态导航试验
[0084]
三轴机械转台控制计算机根据imu与转台的安装关系及接收的imu测量坐标系相对惯性系的三轴角速度ω
s
可计算转台转动角速度ω
c
为
[0085][0086]
控制机械转台转动。机械转台转动过程中imu实时采集角速度和加速度信息,并将其发送给星载计算机,星载计算机按下式外推得到
[0087][0088]
其中r,v,q分别为惯性系下imu位置、速度和imu测量坐标系相对惯性系的姿态四元数,g为试验场地当地重力加速度在惯性系下的表示,a
imu
和ω
imu
为根据星上惯性导航算法利用imu测量处理后得到的本体加速度和角速度。
[0089]
根据式(9)可得到导航试验结束t
f
时刻惯性位置r
f
、速度v
f
、姿态q
f
,根据惯性系与当地天东北地理系的关系进而可得到t
f
时刻当地天东北地理系下位置r
nf
、速度v
nf
、姿态q
nf
。
[0090]
动态导航试验过程中转台坐标系相对于转台基准坐标系的姿态阵可通过转台三轴转动的框架角度计算
[0091][0092]
其中c
y
(θ),c
z
(ψ)分别为绕x,y,z轴旋转θ,ψ角度的旋转矩阵。则由转台转动计算得到的天东北地理系到imu测量坐标系的姿态转换矩阵c
sn
为
[0093][0094]
c
sn
对应的姿态四元数为
[0095]
q
fc
=aq(c
sn
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0096]
则星上惯性导航算法姿态估计误差δq为
[0097][0098]
其中表示四元数乘法运算。
[0099]
星上惯性导航算法位置估计误差为δr=r
nf
、速度估计误差为δv=v
nf
,据此完成
火星edl过程大动态导航试验验证过程。
[0100]
进一步,
[0101]
在一种可能实现的方案中,
[0102]
在一种可能的实现方式中,
[0103]
可选的,
[0104]
本技术提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,当所述计算机指令在计算机上运行时,使得计算机执行图1所述的方法。
[0105]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器和光学存储器等)上实施的计算机程序产品的形式。
[0106]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0107]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0108]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0109]
显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
[0110]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。