1.本发明涉及无人机设备技术领域,尤其涉及一种无人机自动充电平台。
背景技术:
2.目前电动无人机快速发展,已广泛应用于消遣娱乐、航拍、物流、植保、巡检等领域。然而,由于受当前电池技术水平的制约,电动无人机,尤其是具备垂直起降功能的多轴无人机或复合翼无人机的续航里程和滞空时长均较短,其连续作业能力较差,目前靠人工更换电池或通过配套充电设备给无人机充电,来保证无人机连续作业。目前的电动无人机在空中飞行时,通过飞控设备和智能化软件已实现全自动起降和全自动作业,但在地面状态却不具备移动能力,而当前的配套充电设备智能化程度较低,充电过程必须人工操作,这阻碍了无人机自动连续作业,提高了无人机作业成本。
3.随着ai技术的快速发展,无人化程度不断提高,无人机自动连续作业也将是必然趋势。因此,需要围绕在地面具有自主移动功能的无人机开发一种智能化充电平台,使无人机在整个充电过程无需人工干预,实现无人机自动连续作业。
技术实现要素:
4.为了解决上述技术问题,本发明提供了一种无人机自动充电平台,为在地面具有自主移动功能的智能无人机提供垂直起飞和降落的场所,并对智能无人机进行自动充电,使无人机充电过程实现自动化。
5.本发明提供的技术方案如下:
6.一种无人机自动充电平台,用于为智能无人机进行充电,包括:
7.基础平台,用于供所述智能无人机起降及停放充电;
8.自动充电装置,设置在所述基础平台上,用于自动感应所述智能无人机的状态,并对所述智能无人机进行充电或停止充电;
9.所述智能无人机具有垂直起飞和降落功能,并具有在地面自主移动的功能。
10.本技术方案中,具有垂直起飞和降落功能,并具有在地面自主移动功能的智能无人机与自动充电装置相结合,使智能无人机可从作业场所中自动飞入无人机自动充电平台,并在无人机自动充电平台进行自动充电,最后自动飞离无人机自动充电平台,进入作业场所继续作业,实现自动连续作业,提高作业效率,降低作业成本。
11.进一步优选地,所述基础平台,包括:
12.固定平台;
13.起降指示点,设置在所述固定平台上,用于为所述智能无人机的起飞和降落提供指示或引导标识;
14.充电停靠点,设置在所述固定平台上,并位于所述自动充电装置的一侧,用于为所述智能无人机移动至所述自动充电装置处充电提供定位。
15.进一步优选地,所述基础平台,包括:
16.移动平台;
17.起降指示点,设置在所述移动平台上,用于为所述智能无人机的起飞和降落提供指示或引导标识;
18.充电停靠点,设置在所述移动平台上,并位于所述自动充电装置的一侧,用于为所述智能无人机移动至所述自动充电装置处充电提供定位。
19.进一步优选地,所述移动平台包括移动车厢和起降平台,所述移动车厢能够移动并为所述自动充电装置提供安装空间,所述起降平台设置于所述移动车厢的后部,并与所述移动车厢连接,所述起降指示点设置于所述起降平台上,所述充电停靠点设置于所述移动车厢内。
20.进一步优选地,所述起降平台与所述移动车厢枢转连接,所述移动车厢上设置有驱动机构,所述驱动机构与所述起降平台连接,使得所述起降平台在所述驱动机构的驱动下能够折叠在所述移动车厢的内部或尾部;
21.进一步优选地,所述移动车厢内设置有滑轨,所述起降平台的底部设置有滑座,所述滑座与所述滑轨适配连接,使得所述起降平台能够从所述移动车厢的外部移动至所述移动车厢的内部。
22.进一步优选地,所述智能无人机,包括:
23.机体;
24.螺旋桨系统,设置于所述机体的上部,用于为所述智能无人机提供起降及飞行动力;
25.充电口,设置于所述机体上,用于为所述智能无人机提供充电接口;
26.轮式起落架系统,设置于所述机体的下部,用于为所述智能无人机提供地面移动的动力,使得所述智能无人机能够从所述起降指示点自主移动至所述充电停靠点处,或从所述充电停靠点自主移动至所述起降指示点处。
27.进一步优选地,所述自动充电装置包括固定支架、智能充电箱、传感器、机械臂以及充电插头,所述固定支架设置于所述基础平台上,所述智能充电箱设置于所述固定支架上,所述传感器和所述机械臂设置于所述智能充电箱上,所述充电插头设置于所述机械臂的端部;
28.所述智能充电箱根据所述传感器探测所述充电停靠点处所述智能无人机的状态,控制所述机械臂将所述充电插头插入所述智能无人机的充电口进行充电,以及在所述智能无人机充电结束后控制所述机械壁将所述充电插头从所述智能无人机的充电口拔出。
29.进一步优选地,所述机械臂包括支臂固定接头、至少一个支臂以及若干个可转动连接件,所述支臂固定接头固定连接在所述智能充电箱或所述固定支架上,所述支臂的一端通过所述可转动连接件与所述支臂固定接头连接,另一端通过所述可转动连接件与另一所述支臂或所述充电插头连接。
30.进一步优选地,所述固定支架设置有一个,所述固定支架设置在所述基础平台的一侧,所述固定支架上至少设置有一个所述智能充电箱,每个所述智能充电箱上分别设置有至少一个所述传感器、至少一个所述机械臂以及至少一个所述充电插头;
31.或,所述固定支架至少设置有两个,至少两个所述固定支架设置在所述基础平台的四周,每个所述固定支架上至少设置有一个所述智能充电箱,每个所述智能充电箱上分
别设置有至少一个所述传感器、至少一个所述机械臂以及至少一个所述充电插头。
32.与现有技术相比,本发明的无人机自动充电平台有益效果在于:
33.(1)、本发明将智能无人机与自动充电装置相结合,使智能无人机充电过程自动化,无需人工干预,提高充电效率,降低运营成本;
34.(2)、本发明将基础平台中的起降指示点和充电停靠点进行分离设计,可实现一个起降指示点与多个充电停靠点组合使用,提高空间利用率。
附图说明
35.下面将以明确易懂的方式,结合附图说明优选实施方式,对上述特性、技术特征、优点及其实现方式予以进一步说明。
36.图1是本发明实施例一的一种无人机自动充电平台俯视图;
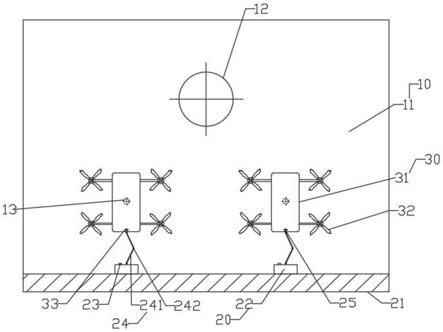
37.图2是本发明实施例一的一种无人机自动充电平台正视图;
38.图3是本发明实施例二的一种无人机自动充电平台俯视图;
39.图4是本发明实施例二的一种无人机自动充电平台正视图;
40.图5是本发明实施例三的一种无人机自动充电平台俯视图;
41.图6是本发明实施例四的一种无人机自动充电平台侧视图;
42.图7是本发明实施例四的一种无人机自动充电平台俯视图。
43.附图标号说明:
44.10.基础平台,11.固定平台,12.起降指示点,13.充电停靠点,14.移动平台,141.移动车厢,142.起降平台,20.自动充电装置,21.固定支架,22.智能充电箱,23.传感器,24.机械臂,241.支臂,242.可转动连接件,243.支臂固定接头,25.充电插头,30.智能无人机,31.机体,32.螺旋桨系统,33.充电口,34.轮式起落架系统。
具体实施方式
45.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本技术实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其他实施例中也可以实现本技术。在其他情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本技术的描述。
46.应当理解,当在本说明书和所附权利要求书中使用时,术语“包括”指示所述描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其他特征、整体、步骤、操作、元素、组件和/或集合的存在或添加。
47.为使图面简洁,各图中只示意性地表示出了与本发明相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
48.还应当进一步理解,在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
49.在附图所示的实施例中,方向的指示(诸如上、下、左、右、前和后)用以解释本发明的各种组件的结构和运动不是绝对的而是相对的。当这些组件处于附图所示的位置时,这
些说明是合适的。如果这些组件的位置的说明发生改变时,则这些方向的指示也相应地改变。
50.另外,在本技术的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
51.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
52.实施例一
53.本实施例提供了一种无人机自动充电平台,如图1、图2所示,用于为智能无人机30进行充电,其包括:基础平台10和自动充电装置20。基础平台10用于供智能无人机30起降及停放充电;自动充电装置20设置在基础平台10上,用于自动感应智能无人机30的状态,并对智能无人机30进行充电或停止充电;智能无人机30具有垂直起飞和降落功能,并具有在地面自主移动的功能。
54.具体地,基础平台10包括固定平台11、起降指示点12和充电停靠点13,固定平台11为人工修建或天然的空间场地;起降指示点12设置至少一个,并位于固定平台11上,为智能无人机30在基础平台10中起飞和降落提供指示或引导标识,如图1和图2所示的起降指示点12为1个;充电停靠点13设置至少一个,并位于固定平台11上,在靠近自动充电装置20处,为智能无人机30移动至自动充电装置20处充电提供定位,如图1和图2所示的充电停靠点13为两个。
55.自动充电装置20包括固定支架21、智能充电箱22、传感器23、机械臂24以及充电插头25,固定支架21设置于基础平台10中,智能充电箱22设置于固定支架21上,传感器23和机械臂24设置于智能充电箱22上,充电插头25设置于机械臂24的端部;智能充电箱22根据传感器23探测充电停靠点13处智能无人机30的状态,控制机械臂24将充电插头25插入智能无人机30的充电口33中进行充电,或在智能无人机30充电结束后控制机械壁24将充电插头25从充电口33拔出。
56.进一步地,机械臂24包括支臂241、可转动连接件242和支臂固定接头243,支臂固定接头243固定连接在智能充电箱22或固定支架21上,支臂241至少设置一个,支臂241的一端通过可转动连接件242与支臂固定接头243连接,另一端通过可转动连接件242与另一支臂241或充电插头25连接。
57.智能无人机30包括机体31、螺旋桨系统32、充电口33以及轮式起落架系统34,螺旋桨系统32设置于机体31的上部;充电口33设置至少一个,并设置于机体31的前部、后部或侧部,图1和图2所示为充电口33为1个,且设置于机体31的前部;轮式起落架系统34设置于机体31的下部;螺旋桨系统32为智能无人机30提供飞行动力,可将智能无人机30垂直降落在起降指示点12或垂直飞离起降指示点12;充电口33为智能无人机30提供充电接口;轮式起落架系统34为智能无人机30提供地面移动的动力,可将智能无人机30从起降点自主移动至充电停靠点13,或从充电停靠点13自主移动至起降指示点12。
58.实施例二
59.在实施例一的基础上,如图3、图4所示,本实施例提供了一种无人机自动充电平
台,用于为智能无人机30进行充电,其包括:基础平台10和自动充电装置20。基础平台10用于供智能无人机30起降及停放充电;自动充电装置20设置在基础平台10上,用于自动感应智能无人机30的状态,并对智能无人机30进行充电或停止充电;智能无人机30具有垂直起飞和降落功能,并具有在地面自主移动的功能。
60.其中,智能无人机30的充电口33设置于机体31的侧部,基础平台10的起降指示点12设置为一个,充电停靠点13设置为两个,且同排布置;智能无人机30的充电口33设置为两个,且分别设置于机体31的前侧部和后侧部;每个充电停靠点13处设置一套自动充电装置20,自动充电装置20包括2个机械臂24和2个充电插头25,能够同时为智能无人机30的两个充电口33进行充电。本实施例与实施例一中的相同之处在此不再赘述。
61.实施例三
62.在实施例二的基础上,如图5所示,本实施例提供了一种无人机自动充电平台,用于为智能无人机30进行充电,其包括:基础平台10和自动充电装置20。基础平台10用于供智能无人机30起降及停放充电;自动充电装置20设置在基础平台10上,用于自动感应智能无人机30的状态,并对智能无人机30进行充电或停止充电;智能无人机30具有垂直起飞和降落功能,并具有在地面自主移动的功能。
63.其中,智能无人机30的充电口33设置于机体31的侧部,基础平台10的起降指示点12设置为一个,充电停靠点13设置为四个,且分布在基础平台10的两侧;智能无人机30的充电口33设置为两个,且分别设置于机体31的前侧部和后侧部;每个充电停靠点13处设置一套自动充电装置20,自动充电装置20包括2个机械臂24和2个充电插头25,能够同时为智能无人机30的两个充电口33进行充电。本实施例提高了空间场地的利用效率,与实施例一中的相同之处在此不再赘述。
64.实施例四
65.在实施例二的基础上,如图6和图7所示,本实施例提供了一种无人机自动充电平台,用于为智能无人机30进行充电,其包括:基础平台10和自动充电装置20。基础平台10用于供智能无人机30起降及停放充电;自动充电装置20设置在基础平台10上,用于自动感应智能无人机30的状态,并对智能无人机30进行充电或停止充电;智能无人机30具有垂直起飞和降落功能,并具有在地面自主移动的功能。
66.具体地,基础平台10包括移动平台14、起降指示点12和充电停靠点13,移动平台14包括移动车厢141和起降平台142,移动车厢141为自动充电装置20提供安装空间,起降平台142设置于移动车厢141的后部,并与移动车厢141连接。
67.在一种实施方式中,起降平台142与移动车厢141枢转连接,移动车厢141上设置有驱动机构,驱动机构与起降平台142连接,使得起降平台142在驱动机构的驱动下能够折叠在移动车厢141的内部或尾部。也即,起降平台142为可折叠式结构,在折叠状态时,折叠收入移动车厢141内,在打开状态时,从移动车厢141内移出展开,为智能无人机30提供起降场地。
68.在另一种实施方式中,移动车厢141内设置有滑轨,起降平台142的底部设置有滑座,滑座与滑轨适配连接,使得起降平台142能够从移动车厢141的外部移动至移动车厢141的内部。也即,起降平台142为可收缩式结构,在收缩状态时,收缩收入移动车厢141内,在打开状态时,从移动车厢141内移出伸展,为智能无人机30提供起降场地。
69.进一步地,起降指示点12设置至少一个,设置于起降平台142上,为智能无人机30的起飞和降落提供指示或引导标识;充电停靠点13设置至少一个,设置于移动车厢141中,位于靠近自动充电装置20处,为智能无人机30移动至自动充电装置20处充电提供定位。如图6、图7所示,起降指示点12设置一个,充电停靠点13设置一个。通过将基础平台10设置为移动式平台,提高无人机自动充电平台使用灵活性。
70.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详细描述或记载的部分,可以参见其他实施例的相关描述。
71.应当说明的是,上述实施例均可根据需要自由组合。以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。