1.本发明涉及无人机复位平台技术领域,特别是涉及一种基于限位开关的无人机复位平台。
背景技术:
2.无人机行业发展迅速,为提高无人机的反应速度和效率,无人机值守平台也悄然而生。由于无人机运行的全过程实现自动化,所以需要保证无人机的降落精度,当无人机降落在平台的任何一个位置,甚至是边缘,都有可能使得收纳仓不能成功的对无人机进行收纳,并且进一步引发损坏装置的现象。另外,现有的无人机复位平台对无人机的兼容性较差,不能适配不同的无人机降落。因此,研发一种新型的无人机复位平台显得极为重要。
技术实现要素:
3.本发明的目的是提供一种基于限位开关的无人机复位平台,兼容性高,可以适应不同型号的无人机降落,并能保证无人机复位时的快速和稳定。
4.为实现上述目的,本发明提供了一种基于限位开关的无人机复位平台,包括降落平台和支撑框,所述支撑框通过连接块与所述降落平台的底面边缘连接,所述降落平台的顶面的两侧边分别设有第一保护罩和第二保护罩,所述第一保护罩和所述第二保护罩内均设有第一双螺旋丝杠,两个所述第一双螺旋丝杠的同一端设有第一传动轮,所述第一传动轮通过传动带与第一动力装置连接,所述第一动力装置固定在所述支撑架的底面,两个所述第一双螺旋丝杠上均设有左滚珠滑块和右滚珠滑块,两个所述左滚珠滑块之间连接有第一横向推杆,两个所述右滚珠滑块之间连接有第二横向推杆,所述第一横向推杆和所述第二横向推杆均与所述第一双螺旋丝杠垂直,其中一个第一双螺旋丝杠的一端的固定座上设有第一限位开关,所述第一限位开关与所述第一横向推杆对应设置;
5.所述降落平台的底面的两端分别设有第三保护罩和第四保护罩,所述第三保护罩和所述第四保护罩内均设有第二双螺旋丝杠,所述第二双螺旋丝杠与所述第一双螺旋丝杠垂直设置,两个所述第二双螺旋丝杠的同一端设有第二传动轮,所述第二传动轮通过传动带与第二动力装置连接,所述第二动力装置固定在所述支撑架的底面,两个所述第二双螺旋丝杠上均设有第一滚珠滑块和第二滚珠滑块,所述第一滚珠滑块和所述第二滚珠滑块的顶端穿过所述降落平台上的滑槽位于所述降落平台的上方,两个所述第一滚珠滑块之间连接有位于所述降落平台上方的第一纵向推杆,两个所述第二滚珠滑块之间连接有位于所述降落平台上方的第二纵向推杆,所述第一纵向推杆和所述第二纵向推杆均与所述第二双螺旋丝杠垂直,所述滑槽设有两个且分别与两个所述第二双螺旋丝杠对应设置,其中一个所述滑槽的一端设有固定在所述降落平台上的第二限位开关,所述第二限位开关与所述第一纵向推杆对应设置。
6.优选的,所述第一动力装置和所述第二动力装置均为无刷减速电机。
7.优选的,所述降落平台的顶面中部设有充电槽。
8.优选的,所述第一动力装置与位于所述支撑架上的第一固定板连接,所述第二动力装置与位于所述支撑架上的第二固定板连接,所述第一固定板和所述第二固定板上均设有对称设置的第一转向轮和第二转向轮。
9.优选的,所述滑槽的中部设有断口,所述断口与所述降落平台一体式连接。
10.优选的,所述第一动力装置、所述第二动力装置、所述第一限位开关、所述第二限位开关均与控制器连接。
11.因此,本发明采用上述结构的基于限位开关的无人机复位平台,兼容性高,可以适应不同型号的无人机降落,并能保证无人机复位时的快速和稳定。
12.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
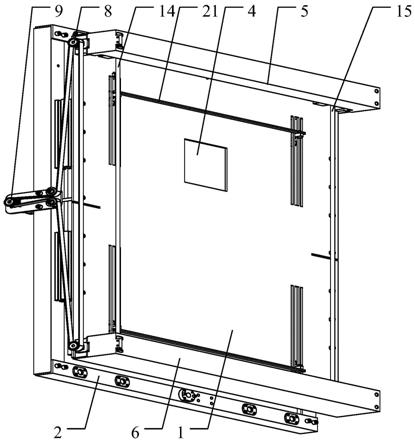
13.图1是本发明基于限位开关的无人机复位平台实施例的示意图;
14.图2是本发明基于限位开关的无人机复位平台中第一双螺旋丝杠的实施例的示意图;
15.图3是本发明基于限位开关的无人机复位平台中的降落平台底面的实施例的示意图;
16.图4是本发明基于限位开关的无人机复位平台中的a处的实施例的示意图。
17.附图标记
18.1、降落平台;2、支撑框;3、连接块;4、充电槽;5、第一保护罩;6、第二保护罩;7、第一双螺旋丝杠;8、第一传动轮;9、第一动力装置;10、控制器;11、第一固定板;12、第一转向轮;13、第二转向轮;14、第一横向推杆;15、第二横向推杆;16、第一限位开关;17、第三保护罩;18、第四保护罩;19、第二动力装置;20、滑槽;21、第一纵向推杆;22、第二纵向推杆;23、第二限位开关。
具体实施方式
19.下面结合附图对本发明的实施方式做进一步的说明。
20.图1是本发明基于限位开关的无人机复位平台实施例的示意图,图2是本发明基于限位开关的无人机复位平台中第一双螺旋丝杠的实施例的示意图,图3是本发明基于限位开关的无人机复位平台中的降落平台底面的实施例的示意图,图4是本发明基于限位开关的无人机复位平台中的a处的实施例的示意图,如图所示,一种基于限位开关的无人机复位平台,包括降落平台1和支撑框2,支撑框2通过连接块3与降落平台1的底面边缘连接。降落平台1的顶面中部设有充电槽4,充电槽4用于向降落平台1充电,以为复位平台提供动力源。降落平台1的顶面的两侧边分别设有第一保护罩5和第二保护罩6,第一保护罩5和第二保护罩6内均设有第一双螺旋丝杠7。两个第一双螺旋丝杠7的同一端设有第一传动轮8,第一传动轮8通过传动带与第一动力装置9连接,第一动力装置9为无刷减速电机,第一动力装置9与控制器10连接,第一动力装置9在控制器10的控制下为两个第一双螺旋丝杠7的旋转提供动力。第一动力装置9固定在支撑架的底面,第一动力装置9与位于支撑架上的第一固定板11连接,第一固定板11上设有对称设置的第一转向轮12和第二转向轮13,传动带依次绕设在第一动力装置9的输出轴、第一转向轮12、两个第一传动轮8、第二转向轮13上,最终绕设
回第一动力装置9的输出轴,使得传动带能够将第一动力装置9上的动力传递给两个第一双螺旋丝杠7。
21.两个第一双螺旋丝杠7上均设有左滚珠滑块和右滚珠滑块,两个左滚珠滑块之间连接有第一横向推杆14,两个右滚珠滑块之间连接有第二横向推杆15,第一横向推杆14和第二横向推杆15均与第一双螺旋丝杠7垂直,第一横向推杆14和第二横向推杆15能够在两个第一双螺旋丝杠7旋转时进行相互靠近运动或相互远离运动,进而对无人机在降落平台1上进行横向复位。其中一个第一双螺旋丝杠7的一端的固定座上设有第一限位开关16,第一限位开关16与第一横向推杆14对应设置,第一限位开关16与控制器10连接,第一横向推杆14运动到第一限位开关16的位置后,第一限位开关16传递信号给控制器10,控制器10控制第一动力装置9停止运行。
22.降落平台1的底面的两端分别设有第三保护罩17和第四保护罩18,第三保护罩17和第四保护罩18内均设有第二双螺旋丝杠,第二双螺旋丝杠与第一双螺旋丝杠7垂直设置。两个第二双螺旋丝杠的同一端设有第二传动轮,第二传动轮通过传动带与第二动力装置19连接,第二动力装置19为无刷减速电机,第二动力装置19与控制器10连接,第二动力装置19在控制器10的控制下为两个第二双螺旋丝杠提供旋转动力。第二动力装置19固定在支撑架的底面,第二动力装置19与位于支撑架上的第二固定板连接,第二固定板上设有对称设置的第一转向轮12和第二转向轮13,传动带依次绕设在第二动力装置19的输出轴、第一转向轮12、两个第二传动轮、第二转向轮13上,最终绕设回第二动力装置19的输出轴。
23.两个第二双螺旋丝杠上均设有第一滚珠滑块和第二滚珠滑块,第一滚珠滑块和第二滚珠滑块的顶端穿过降落平台1上的滑槽20位于降落平台1的上方,两个第一滚珠滑块之间连接有位于降落平台1上方的第一纵向推杆21,两个第二滚珠滑块之间连接有位于降落平台1上方的第二纵向推杆22,第一纵向推杆21和第二纵向推杆22均与第二双螺旋丝杠垂直,第一纵向推杆21和第二纵向推杆22能够在两个第二双螺旋丝杠旋转时进行相互靠近运动或相互远离运动,进而对无人机在降落平台1上进行纵向复位。滑槽20设有两个且分别与两个第二双螺旋丝杠对应设置,其中一个滑槽20的一端设有固定在降落平台1上的第二限位开关23,第二限位开关23与第一纵向推杆21对应设置,第二限位开关23与控制器10连接,第一纵向推杆21运动到第二限位开关23的位置后,第二限位开关23传递信号给控制器10,控制器10使得第二动力装置19停止运行。滑槽20的中部设有断口,断口与降落平台1一体式连接,断口的设置能够减少滑槽20的面积,进而增加降落平台1的强度。
24.使用时,在控制器10上根据无人机的尺寸对第一动力装置9和第二动力装置19的旋转进行设定以得出第一横向推杆14和第二横向推杆15之间的最短距离,和第一横向推杆14和第二横向推杆15之间的最短距离,控制器10控制第一动力装置9和第二动力装置19旋转,使第一横向推杆14和第二横向推杆15相互靠近至与无人机尺寸相匹配的最短距离,第一纵向推杆21和第二纵向推杆22相互靠近至与无人机尺寸相匹配的最短距离,此过程中第一横向推杆14、第二横向推杆15、第一横向推杆14和第二横向推杆15将无人机推至降落平台1的中间位置,之后,控制器10控制第一动力装置9和第二动力装置19反向旋转,使第一横向推杆14和第二横向推杆15相互远离,第一纵向推杆21和第二纵向推杆22相互远离,当第一横向推杆14运动到第一限位开关16的位置后,第一限位开关16传递信号给控制器10,控制器10控制第一动力装置9停止运行,当第一纵向推杆21运动到第二限位开关23的位置后,
第二限位开关23传递信号给控制器10,控制器10使得第二动力装置19停止运行,至此完成一次无人机复位动作。
25.因此,本发明采用上述结构的基于限位开关的无人机复位平台,兼容性高,可以适应不同型号的无人机降落,并能保证无人机复位时的快速和稳定。
26.最后应说明的是:以上实施例仅用以说明本发明的技术方案而非对其进行限制,尽管参照较佳实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本发明的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本发明技术方案的精神和范围。