1.本发明涉及一种多机协同搭建任务系统,属于多无人机协同技术领域。
背景技术:
2.随着人工智能技术的发展,各行各业不断涌现出一些新技术、新方法,得益于此,作为尖端技术代表的无人机技术也随之迅猛发展。而随着无人机需求场景的日益复杂,其承担任务的种类也日趋多样,单架无人机常难以满足实际需要,为此,各科研院所、高校及科技公司深入研究,多无人机协同工作方面取得了一大批丰硕的研究成果。
3.在多机协同工作方面,尤以多无人机协同控制方法和策略居多,如基于模糊控制的无人机距离调整方法、基于人工势场法的集群路径规划方法、基于地理围栏的场景建模方法等方面的理论成果,以及基于多无人机编队的飞行表演技术、协同侦察技术和协同作战技术等已经处以实用阶段的技术成果,然而,在诸多的多机协同作业任务中,还鲜有在建筑领域方面的探索,已有的技术则更多的集中在建筑过程中的土地测量、废物监测、安全改进等方面。
技术实现要素:
4.本发明所要解决的技术问题在于克服现有技术不足,提供一种多机协同搭建任务终端、系统,可以在不改变任务飞行平台的基础上,完成不同形式的多机协同搭建任务。
5.本发明的多机协同搭建任务执行终端,包括一组分别通过子系统安装接口111挂载于各自所对应飞行平台底部的任务子系统;子系统安装接口11包括与飞行平台底部相连接的一级柔性缓冲安装架110以及安装于一级柔性缓冲安装架110中的一组二级柔性触底检测模块111;一级柔性缓冲安装架110包括:固定于飞行平台底部的主安装板1101,安装在主连接板1101下方的四个管夹1102,分别固定在四个管夹1102中的四个竖直导杆1103,套在竖直导杆1103外的一次缓冲弹簧1104,设置有子系统标准安装孔位的子系统安装板1105,套在竖直导杆1103下部末端的四个止动管夹1106。
6.优选地,所述二级柔性触底检测模块111包括:副安装板1111、导套1112、二次缓冲导杆1113、限位环1114、二次缓冲弹簧1115、开关支板1116、触碰开关1117;副安装板1111安装于子系统安装板1105上;导套1112固定于副安装板1111上;二次缓冲导杆1113穿过导套1112,并通过限位环1114将其限位;二次缓冲导杆1113外部套有二次缓冲弹簧1115,二者共同安装于开关支板1116上;触碰开关1117则固定在开关支板1116上。
7.进一步优选地,所述二级柔性触底检测模块111为两个,两个二级柔性触底检测模块111平行反向安装以使得两个触碰开关1117的弹片朝向相反的方向 。
8.优选地,所述任务子系统包括抓取装置12;所述抓取装置12包括:与子系统安装接口11的四个竖直止动管夹(1106)分别连接的四个连接杆121,与连接杆121相连的水平方向的一级承力架122,竖直穿过一级承力架122的抓取滑动导杆123,套在抓取滑动导杆123外的抓取减震弹簧124,套在抓取滑动导杆123上端的止动环125,固定在抓取滑动导杆123下
部末端的固定管夹126,连接于固定管夹126下方的水平方向的二级承力架127,以及安装于二级承力架127下方的一组真空吸盘128。
9.进一步优选地,所述真空吸盘128共有6对,均布于二级承力架127的四个角点和长中心轴线上。
10.优选地,所述任务子系统包括辅助铺设装置13;所述辅助铺设装置13包括由水平方向的对接安装板1311以及与对接安装板1311下部两端固定连接的两片侧向承力板1312所构成的安装架131,其中对接安装板1311与子系统安装接口11对接;两片侧向承力板1312之间安装有平行设置的两个方形的滚筒1315,滚筒舵机1313固定于侧向承力板1312外侧并通过十字转盘1314与滚筒1315的侧面相连,滚筒1315四个工作面的角点处分别安装有垫片1316,垫片1316上方固定有强磁铁1317。
11.进一步优选地,对接安装板1311中心位置还安装有一个竖直向下的相机固定架1318。
12.优选地,子系统安装板1105上设置有多个镂空部,从而可有效降低子系统的空重。
13.基于同一发明构思还可以得到以下技术方案:一种多机协同搭建系统,包括任务执行终端以及用于搭载所述任务执行终端的一组飞行平台;所述任务执行终端为如上任一技术方案所述多机协同搭建任务执行终端。
14.一种附着板材,用于与所述多机协同搭建任务执行终端配套使用;所述附着板材由附着物中心夹层以及分别附着于附着物中心夹层正、反面的正面附着层和反面附着层组成,正面附着层内嵌有铁片,正、反面附着层表面均设置有具有粘结性的附着物。
15.相比现有技术,本发明具有以下有益效果:本发明针对多机协同搭建任务设计了一种可适用于不同任务子系统的标准子系统安装接口,其采用双重柔性缓冲保护及子系统抖动检测方案,基于该双重柔性保护机制的多机协同搭建系统可保证飞行器平台在执行任务过程中有效避免刚性冲击,大幅减小冲击载荷扰动,在提高系统整体安全性的同时,还提高了任务子系统执行任务的精准性。
16.本发明的一个实施例中给出了抓取装置与辅助铺设装置相配合以实现多机协同搭建任务的具体实现形式,为智能化的无人机搭建建筑物提供了一种新的思路和途径,使得完成更为复杂的多机协同搭建任务成为可能。
17.本发明还创新性的提出了一种基于磁吸式的附着物铺设技术,基于该技术可进一步发展铺设压力可控、铺设方式便捷的搭建附着物铺设方法,基于该种辅助搭建思路的方式还可进一步用于基于人工建筑的实际工地建设场景,将传统的漫抹水泥的方式转向基于附着物板材的搭建方式。
附图说明
18.图1为本发明多机协同搭建系统一个具体实施例的结构示意图;图2为带有双重柔性保护机制的子系统安装接口结构示意图;图3为二级柔性触底检测模块的安装方向示意图;图4为抓取装置的结构示意图;图5为辅助铺设装置的结构示意图;图6为抓取机抓取过程示意图;
图7为匠工机工作原理示意图。
19.图中包含以下附图标记:01、抓取机,02、匠工机,1、飞行平台,11、子系统安装接口,110、一级柔性缓冲安装架,1101、主安装板,1102、管夹,1103、竖直导杆,1104、一次缓冲弹簧,1105、子系统安装板,1106、止动管夹,111、二级柔性触底检测模块,1111、副安装板,1112、导套,1113、二次缓冲导杆,1114、限位环,1115、二次缓冲弹簧,1116、开关支板,1117、触碰开关,12、抓取装置,121、连接杆,122、一级承力架,123、抓取滑动导杆,124、抓取减震弹簧,125、止动环,126、固定管夹,127、二级承力架,128、真空吸盘,13、辅助铺设装置,131、安装架,1311、对接安装板,1312、侧向承力板,1313、滚筒舵机,1314、十字转盘,1315、滚筒,1316、垫片,1317、强磁铁,1318、相机固定架,132、附着板材,1321、附着物中心夹层,1322、反面附着层,1323、正面附着层,1324、填充垫片,1325、铁片。
具体实施方式
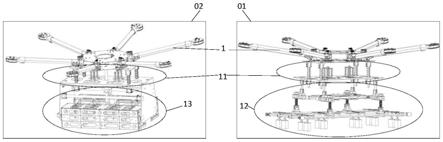
20.为了便于公众理解,下面以最简单的双机协同搭建系统为例并结合附图来对本发明的技术方案进行详细说明:本实施例中使用一架抓取机01与一架匠工机02完成双机协同搭建过程的演示。如图1所示,抓取机01由飞行平台1及子系统安装接口11、抓取装置12共同构成,匠工机02由飞行平台1及子系统安装接口11、辅助铺设装置13共同构成,两架完成组装的无人飞行平台共同构成本实施例中所述的双机协同搭建系统。
21.本实施例中使用统一的飞行平台和子系统安装接口,如图2所示,所述子系统安装接口11包括:与飞行平台1相连接的一级柔性缓冲安装架110,其中主安装板1101固定于机架1下方,安装在主连接板1101上的四个管夹1102,固定在管夹1102中的四个竖直导杆1103,套在竖直导杆1103外的一次缓冲弹簧1104,含有子系统标准安装孔位的子系统安装板1105,套在竖直导杆执行末端的四个止动管夹1106;此外,子系统安装接口11中还包括了两个二级柔性触底检测模块111,所述二级柔性触底检测模块111包括:副安装板1111、导套1112、二次缓冲导杆1113、限位环1114、二次缓冲弹簧1115、开关支板1116、触碰开关1117;其中副安装板1111安装于子系统安装板1105上,导套1112固定于副安装板1111上,二次缓冲导杆1113穿过导套1112,并通过限位环1114将其限位,二次缓冲导杆1113外部套有二次缓冲弹簧1115,二者共同被安装与开关支板1116上,触碰开关1117则固定在开关支板1116上。特别地,本实施例中的两个二级柔性触底检测模块111需要按图3所示的方式平行反向安装,以使得两个触碰开关1117的弹片朝向相反的方向。
22.本实施例中所使用的抓取装置12如图4所示,包括:与子系统安装接口11的四个竖直止动管夹(1106)分别连接的四个连接杆121,与连接杆121相连的水平方向的一级承力架122,竖直穿过一级承力架122的抓取滑动导杆123,套在抓取滑动导杆123外的抓取减震弹簧124,套在抓取滑动导杆123上端的止动环125,固定在抓取滑动导杆123下部末端的固定管夹126,连接于固定管夹126下方的水平方向的二级承力架127,以及安装于二级承力架127下方的一组真空吸盘128。其中,抓取减震弹簧124需要提供比较紧致的预紧力,以确保抓取装置12能够平滑作动,本实施例中的六对真空吸盘128分别均布于二级承力架四个角点和长中心轴线上,以此确保在无人机飞行平台有飞行偏差的情况下,吸附点仍可构成稳
定的三角形结构。
23.本实施例中所使用的辅助铺设装置13如图5所示,主要包括由水平方向的对接安装板1311以及与对接安装板1311下部两端固定连接的两片侧向承力板1312所构成的安装架131,其中对接安装板1311与子系统安装接口11对接;两片侧向承力板1312之间安装有平行设置的两个方形的滚筒1315,滚筒舵机1313固定于侧向承力板1312外侧并通过十字转盘1314与滚筒1315的侧面相连,滚筒1315四个工作面的角点处分别安装有垫片1316,垫片1316上方固定有强磁铁1317;此外,对接安装板1311中心位置还安装有一个竖直向下的相机固定架1318。
24.上述辅助铺设装置13需要使用适配的附着板材132,其结构如图5所示,其中附着物中心夹层1321置于附着板材132的中心,反面附着层1322固定于附着物中心夹层1321背面,正面附着层1323固定于附着物中心夹层1321正面,且正面附着层1323需开孔(盲孔、通孔均可),孔内部需填充垫片1324,并在填充垫片1324下方固定铁片1325,反面附着层1322表面设置有具有粘结性的附着物。特别地,本实施例中所选的附着物为强力3m双面胶,并且在滚筒1315表面附一层离型隔离硅油纸。
25.下面将结合实施例的具体结构,对多机协同搭建的协作方式进一步加以说明。
26.1)抓取机抓取构件:如图6所示,抓取机01在抓取过程中,首先飞行至待抓取构件的正上方中心点处,而后缓慢降低飞行高度,抓取机01的真空吸盘128触碰到构件之后,抓取机的机架1仍然会继续下降高度,此时由于抓取机下方已与构件有所接触,无人飞行平台的子系统安装接口11中的一次缓冲弹簧1104开始逐渐压缩,竖直导杆1103平滑沿着其导向孔向下移动,此过程中真空吸盘128同构件表面之间由虚接触过渡至紧密接触,且在一次缓冲弹簧的减震保护下,抓取机01在下降高度的过程中受到的扰动小,可始终保持较好的飞行姿态。该下压过程持续至主连接板1101触碰到触碰开关1117,该时刻可判定为真空吸盘128已将构件牢固的抓紧,下压过程结束,抓取机01开始携带构件起飞,并将其运往搭建地点。由于二级柔性触底检测模块111的存在,下压的终止位置允许有部分的过冲。
27.2)抓取机释放构件:抓取机01携带构件飞至指定的搭建地点正上方后缓慢下降,该过程同抓取过程的下降方式完全一致,抓取机01携带构件下降至主连接板1101触碰到触碰开关1117后,释放真空吸盘128的电源即可完成构件的摆放。
28.3)匠工机辅助搭建:如图7所示,匠工机02的滚筒1315各个面均以磁吸的方式挂载附着板材132,在抓取机01工作工程中,匠工机02飞至安全的高空,并将一对带有附着板材132的滚筒1315旋转至地面方向,待抓取机01将构件摆放完成后,匠工机02飞行至摆放好的构件正上方,并开始沿竖直方向缓慢下压,当附着板材132接触到构件之后,匠工机02继续下压,直至下压至子系统接口11中的触碰开关1117被触发,此时实施例中附着板材132完全粘贴在构件表面,匠工机02完成本次铺设附着材料的任务,开始执行竖直起飞命令,附着板材132此时因其本身和构件之间的粘合力大于同圆形强磁铁之间的吸合力,因此会顺利的脱离滚筒1315表面,并且均匀的被铺设于当前构件的最上层。匠工机02完成一次辅助铺设操作后继续执行飞往空中的安全等待点,等待执行下一次辅助任务,当滚筒1315各个表面的附着板材132均使用
后,匠工机02可返回起飞点快速完成附着板材132的装机。