1.本发明涉及航空技术领域,特别涉及一种飞行器旋翼系统及控制方法。
背景技术:
2.近十几年来,随着复合材料、动力系统、传感器、尤其是飞行控制等技术的研究进展,无人直升机得到了迅速的发展,正日益成为人们关注的焦点;在无人直升飞机领域,直升无人机成为一种飞行器界的新物种;然而普通直升机其技术已经出现普遍化,发展缓慢,并且此类飞行器的控制方法也相对比较复杂,其结构也相对比较的复杂。
技术实现要素:
3.本发明的目的是为了克服上述问题,提供一种飞行器旋翼系统及控制方法。
4.为达到上述目的,本发明采用的方法是:提供一种飞行器旋翼系统,包括旋翼组件、万向传动组件、倾转机构、倾转运动组件、动力组件;所述的旋翼组件包括旋翼和桨夹,所述的旋翼设置在所述的桨夹上;所述的万向传动组件包括十字万向节、主动传动轴、从动传动轴,十字万向节包括四个成十字分布的铰接轴;从动传动轴包括连接部、与连接部连接的铰接部以及与连接部连接的动盘,连接部与桨夹固定连接,铰接部与两个同向的铰接轴铰接,所述的主动传动轴的一端与十字万向节的另外两个铰接轴铰接,动力组件与主动传动轴的另一端连接,用于驱动主动传动轴转动;所述的倾转机构包括倾斜静盘,倾转轴承;所述的倾斜静盘的内侧通过倾转轴承与所述的从动传动轴动盘外侧铰接,从动传动轴通过倾转轴承可在倾斜静盘内侧转动,倾转运动组件与倾斜静盘连接,用于驱动倾斜静盘倾转。
5.作为本发明的优选,所述的倾转运动组件包括倾转驱动器底座、右倾转驱动器、前倾转驱动器、右驱动力臂、前驱动力臂、右驱动连杆、前驱动连杆;所述的倾斜静盘上设有第一伸出杆与右驱动连杆的一端铰接,所述的右驱动连杆的另一端与右驱动力臂的一端铰接;所述的右驱动力臂的另一端与所述的右倾转驱动器的扭矩输出轴固定连接;所述的倾斜静盘上设有第二伸出杆与右驱动连杆的一端铰接,所述的右驱动连杆的另一端与前驱动力臂的一端铰接;所述的前驱动力臂的另一端与前倾转驱动器的扭矩输出轴固定连接。
6.作为本发明的优选,所述的倾转运动组件还包括倾转盘限制器,倾转盘限制器为通过轴铰接的双连杆结构,其一端与所述的倾斜静盘的一侧铰接,另一端与倾转驱动器底座的外侧铰接。
7.作为本发明的优选,所述的右倾转驱动器和前倾转驱动器分别固定安装在倾转驱动器底座上的不同角度位置上。
8.作为本发明的优选,所述的动力组件为直驱电机,包括定子和转子;所述动力组件的定子与倾转驱动器底座固定安装;所述的转子与主动传动轴的另一端固定连接。
9.作为本发明的优选,所述的旋翼设置有至少两个。
10.本发明还公开了上述一种飞行器旋翼系统的控制方法,包括以下步骤:飞行器旋翼系统通过右倾转驱动器和前倾转驱动器带动倾斜静盘进行倾斜改变旋转中的旋翼组件的桨盘角度,从而改变升力方向,从而控制安装有所述的飞行器旋翼系统的飞行器进行操纵飞行;万向传动组件保证在旋翼组件改变方向的情况下,持续为旋翼组件传递扭矩;通过增加或者减少动力组件的转速改变旋翼组件转速,调整升力大小使飞行器可以升高或者降低。
11.本发明还公开了一种矢量旋翼单桨直升机,包括机身、飞行器旋翼系统以及尾桨动力系统;所述的飞行器旋翼系统安装在机身上方,所述的尾桨动力系统安装在机身尾部;所述的飞行器旋翼系统为上述所述的飞行器旋翼系统。
12.本发明还公开了一种矢量旋翼单桨直升机的控制方法,包括以下步骤:矢量旋翼单桨直升机的尾桨动力系统通过调整尾桨转速平衡飞行器旋翼系统的旋翼所产生的反扭距;通过倾转倾斜静盘使旋转的旋翼桨盘倾斜控制飞行器的横滚和俯仰;通过增加和减少旋翼转速来控制矢量旋翼单桨直升机的升降。
13.有益效果:在微型飞行器领域,本发明通过增加万向传动结构取消了桨叶变距结构,通过直接改变桨盘的角度,来控制升力方向从而控制飞行器。本发明的设计取消了大量的轴承结构,连杆结构,使传动更加直接,结构更加简单,体积更加紧凑,在提供可靠性的同时降低了制造成本,并且没有牺牲性能。本发明的相对直接操纵方式,使飞控可以通过相比普通直升飞机更为简单的控制方法完成自动驾驶。
附图说明
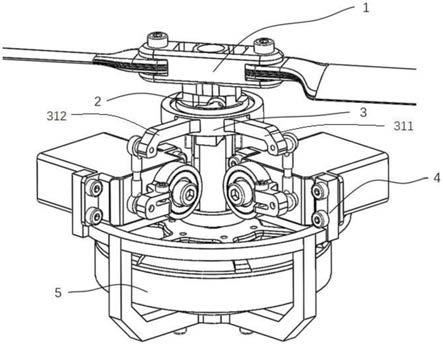
14.图1为本发明的飞行器旋翼系统结构示意图;图2为本发明用于体现倾转运动组件的结构示意图;图3为本发明的从动传动轴的结构示意图;图4为本发明的十字万向节的结构示意图;图5为本发明的体现斜盘限制器结构示意图。
具体实施方式
15.下面结合附图和具体实施例,进一步阐明本发明,本实施例在以本发明技术方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
16.实施例1:如图1到图5所示的一种飞行器旋翼系统,包括旋翼组件1、万向传动组件2、倾转机构3、倾转运动组件4、动力组件5。
17.旋翼组件1包括旋翼11和桨夹12,旋翼11设置桨夹12上,旋翼11的数量可以采用两个、三个、四个、五个等,本实施例中,旋翼11设置有两个。
18.万向传动组件2包括十字万向节21、主动传动轴22和从动传动轴23。十字万向节21包括四个成十字分布的铰接轴211,也就是说四个铰接轴211两两对称的分布。从动传动轴
23包括连接部231、与连接部231连接的铰接部232以及与连接部231连接的动盘233。连接部231与桨夹12的中间位置固定连接,铰接部232设在连接部231的下方,与两个同向的铰接轴211铰接,动盘233为一个环形状,动盘233的上端面与连接部231的下端面固定连接,铰接部232设置在动盘233的内圈内。
19.主动传动轴22的一端与十字万向节21的另外两个铰接轴211铰接,动力组件5与主动传动轴22的另一端连接,用于驱动主动传动轴22转动。动力组件5可以是无刷电机,发动机,有刷电机的一种,本实施例中,动力组件5采用的是无刷直驱电机,包括定子52和转子51。动力组件5的定子52与倾转驱动器底座41固定安装,转子51与主动传动轴22的另一端固定连接。
20.倾转机构3包括倾斜静盘31,倾转轴承32,倾斜静盘31的内侧通过倾转轴承32与从动传动轴23动盘233外侧铰接,这样从动传动轴23通过倾转轴承32可在倾斜静盘31内侧转动,倾转运动组件4与倾斜静盘31连接,用于驱动倾斜静盘31倾转。
21.倾转运动组件4包括倾转驱动器底座41、右倾转驱动器42、前倾转驱动器43、右驱动力臂44、前驱动力臂45、右驱动连杆46、前驱动连杆47。所述的倾斜静盘31上设有第一伸出杆311与右驱动连杆46的一端铰接,右驱动连杆46的另一端与右驱动力臂44的一端铰接;所述的右驱动力臂44的另一端与右倾转驱动器42的扭矩输出轴固定连接。
22.倾斜静盘31上设有第二伸出杆312与右驱动连杆46的一端铰接,右驱动连杆46的另一端与前驱动力臂45的一端铰接;前驱动力臂45的另一端与前倾转驱动器43的扭矩输出轴固定连接。右倾转驱动器42和前倾转驱动器43分别固定安装在倾转驱动器底座41上的不同角度位置上,以便驱动倾斜静盘31可以倾转到任意角度,相应的倾斜静盘31上的第一伸出杆311和第二伸出杆312也是设置在不同的角度上,本实施例中,将第一伸出杆311和第二伸出杆312的方向设置成垂直。
23.倾转运动组件4还包括倾转盘限制器48,倾转盘限制器48为通过轴铰接的双连杆结构,其一端与所述的倾斜静盘31的一侧铰接,另一端与倾转驱动器底座41的外侧铰接,倾转盘限制器48用以限制倾转静盘31的方位角度不变。
24.本实施例还公开了上述一种飞行器旋翼系统的控制方法,包括以下步骤:动力组件5的的转子带动主动传动轴22转动,主动传动轴22带动十字万向节21转动,从而带动从动传动轴23转动,从动传动轴23转动带动旋翼组件1转动。
25.飞行器旋翼系统通过右倾转驱动器42和前倾转驱动器43带动倾斜静盘31进行倾斜改变旋转中的旋翼组件1的桨盘角度,从而改变升力方向,从而控制安装有所述的飞行器旋翼系统的飞行器进行操纵飞行;万向传动组件2保证在旋翼组件1改变方向的情况下,持续为旋翼组件1传递扭矩;通过增加或者减少动力组件5的转速改变旋翼组件1转速,调整升力大小使飞行器可以升高或者降低。
26.实施例2:本实施例公开了一种矢量旋翼单桨直升机,包括机身、飞行器旋翼系统以及尾桨动力系统。飞行器旋翼系统安装在机身上方,尾桨动力系统安装在机身尾部;飞行器旋翼系统为实施例1所述的飞行器旋翼系统。
27.本实施例的矢量旋翼单桨直升机的控制方法,包括以下步骤:
矢量旋翼单桨直升机的尾桨动力系统通过调整尾桨转速平衡飞行器旋翼系统的旋翼11所产生的反扭距;通过倾转倾斜静盘31使旋转的旋翼桨盘倾斜控制飞行器的横滚和俯仰;通过增加和减少旋翼11转速来控制矢量旋翼单桨直升机的升降。
28.本发明方案所公开的技术手段不仅限于上述技术手段所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。以上所述是本发明的具体实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。