自主无人机诊断
背景技术:
1.无人飞行器(uav)的操作目前仅限于视觉视线。也就是说,uav一般必须在操作员的视觉接触范围内操作。uav在视觉视线之外(即人操作员的视觉接触范围之外)操作的能力可能要求操作员遵守与系统可靠性、故障保护冗余和维护/检查协议相关的更严格的规定。虽然目前没有定义,但为了在视线之外操作,包括用于商业目的(诸如递送包裹),uav可能有必要在每次飞行/任务之前和/或之后接受安全和维护检查。
技术实现要素:
2.概括地讲,本文描述的各方面涉及用于在uav的每次任务之前和/或之后执行各种安全和维护检查的自主无人机诊断系统。特别地,本文描述的无人机诊断系统可以被部署为车载uav控制系统的一部分。车载uav控制系统的一个用例可以是用于使用uav来递送包裹。相应地,车载uav控制系统可以包括递送卡车(例如,传统上用于包裹递送服务的卡车)、回收/发射系统和无人机诊断系统。通过使用自主检查和维护系统,诸如本文描述的无人机诊断系统,可以在不要求维护技术人员实际在场的情况下完成高度技术性的检查和维护程序,提高效率,减少uav在任务之间的停机时间,并且确保uav在视线之外的安全操作,在视线之外,潜在的危险故障不太容易被实时检测到。
3.此“发明内容”旨在以简化的形式介绍下面将在本公开的详细描述部分中进一步描述的精选概念。此“发明内容”并非旨在指出所要求保护的主题的关键特征或必要特征,亦非旨在用于协助确定所要求保护的主题的范围。
4.该技术的附加目的、优点和新颖特征将部分地在随后的描述中阐述,并且部分将在研究下文或通过实践该技术而了解后对本领域技术人员变得显而易见。
附图说明
5.下面参考附图详细描述本技术,其中:
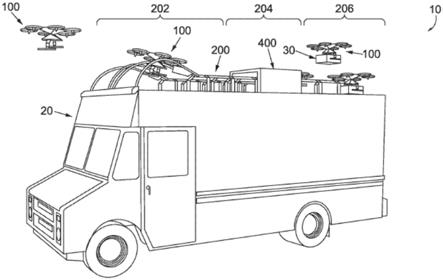
6.图1例示了根据本文描述的实施例的车载uav控制系统的示例;
7.图2是根据本文描述的实施例的与uav控制系统的操作兼容的uav的透视图;
8.图3是根据本文描述的实施例的图2的uav的侧视图;
9.图4例示了根据本文中的实施例的uav控制系统的一个方面;
10.图5例示了根据本文描述的实施例的图4的检查部分的放大部分;
11.图6是根据本文描述的实施例的自含式(self
‑
contained)无人机诊断系统的一个方面;
12.图7a至7b是根据本文描述的实施例的图6的自含式无人机诊断系统的剖视图;
13.图8是根据本文描述的实施例的用于自主地执行无人机诊断的示例性方法的流程图;以及
14.图9是根据本文描述的实施例的适于执行本公开的一个或多个操作的示例性计算环境。
具体实施方式
15.本公开参考附图更全面地描述了各种实施例。应当理解,本文示出并且描述了一些实施例,但不是所有实施例。实际上,这些实施例可以采取许多不同的形式,并且相应地,本公开不应被解释为限于本文阐述的实施例。相反,提供这些实施例以使本公开满足适用的法律要求。相同的数字通篇指代相同的元件。
16.i.概述
17.各种实施例是针对用于执行或促进uav的自主检查和维护的系统、装置、方法和计算机存储介质。在一个方面中,公开了一种系统,包括:uav部署车辆、检查站(在本文中也被称为无人机诊断系统),该检查站包括被配置为收集结构完整性数据的至少一个成像传感器和被配置为收集飞行参数数据的至少一个方向力传感器(在本文中也被称为重量或力传感器)。该系统还可以包括计算机处理组件,该计算机处理组件通信联接到检查站,并且被配置为从检查模块接收结构完整性数据并且确定uav的结构完整性是否超过结构完整性阈值,以及从检查模块接收飞行参数数据并且确定飞行参数是否超过飞行参数阈值。
18.ii.操作环境
19.图1例示了uav控制系统10的一个方面,该uav控制系统的任何一个或多个部分都是本公开的主题。在一些方面中,uav控制系统10促进uav的安全和有效操作,尤其当单个uav(诸如uav 100)执行多个任务时。在此情况下,如上所述,可能期望或有必要在任务之间检查uav。uav控制系统10包括多个组件、模块、站等,它们合作为(多个)uav的部署提供单一、统一的操作基础。在多个方面中,uav控制系统10一般可以包括车辆20和联接到车辆20的轨道系统200。在其他方面中,uav控制系统可以是固定的地面系统(即,在没有被置于可移动物体上的情况下不能移动),或者是半移动的地面系统(即,在拖车上,能够被拖曳,但是没有这样做的固有能力)。在任何方面中,可以说轨道系统被分成多个部分,诸如回收部分202、检查部分和发射部分206。回收部分202被配置为允许接近uav 100用以被引导到轨道系统200中和/或轨道系统上。在一些方面中,回收部分202也可以包括卸载开口,该开口允许空货物或货物运送器(诸如包裹运送器)用以被返回到车辆20的内部。检查部分204包括无人机诊断系统,该系统将在本文中更详细地讨论。在一些方面中,检查部分204可以包括机库400,以至少部分地容纳用来对uav 100执行一个或多个检查(inspection)、测试(test)和/或检验(check)的一个或多个诊断组件。被描绘为在检查部分204的后方,轨道系统可以包括发射部分206,该发射部分被配置为促进uav 100从车辆20起飞。在一些方面中,发射部分206可以是装载开口,该开口允许货物或货物运送器(诸如运送包裹30的包裹运送器)用以在起飞前从车辆20的内部取回并且联接到uav 100。
20.iii.无人飞行器
21.本公开提供了一种无人机诊断系统。如上所介绍,无人机诊断系统可以是uav控制系统上的组件,其中uav控制系统还可以包括回收组件、卸载组件、货物组件、检查组件和发射组件,所有这些组件都被配置为促进uav的安全和有效操作。
22.整个本公开中,“无人系统”包括能够在没有来自机载人员的输入的情况下操作至少一段时间的系统。无人系统可以包括陆地交通工具、水上交通工具或飞行器(uav)。无人系统有时可以包括能够控制无人车辆或向无人系统提供指令的机载人员。一些无人系统可以在没有机载人员的情况下操作,但是可以由人飞行员/操作员远程控制或部分地控制。一
些无人系统可以通过从计算机程序接收指令来自主地操作。因此,为了完成目标,无人系统可以在接收到的指令的引导下,或者在人操作员的部分或全部控制下自主地操作。一般来讲,词语“无人机(drone)”可以被认为是与“无人系统”同义,或者具体来讲,如本文所用的“uav”。
23.适用于本公开的uav的一个示例是能够进行垂直和/或短距起降(vstol)操作的多旋翼飞行器。也就是说,与常规飞机相比,uav的操作更类似于直升机,其原因在于它可以获得垂直升力,同时需要足够的水平加速度来产生足够的起飞升力,在本文被称为常规起降(ctol)。本文例示的uav被示出为具有六个旋翼;然而,可以明确地设想,与当前公开的无人机诊断系统兼容使用的uav可以具有任何数量的旋翼,或者可以是固定翼飞机,无论uav是否能够进行vstol操作或ctol操作,或者两种操作的某种组合。
24.如本公开所用,词语“递送”旨在意指“放下”和“拾取”,除非选项中的一个不可行。例如,“递送车”是能够在某个位置拾取包裹并且放下包裹的车辆。
25.概括地讲,本技术描述了一种无人机诊断系统,该系统可以用来促进uav的安全和有效操作。具体来讲,无人机诊断系统可以被配备和/或被配置为在很少或没有人工干预的情况下对uav执行任何一种或多种诊断测试、检查、查询等。相应地,图2示出了uav 100和包裹运送器200的透视图,该包裹运送器被配置为联接到uav 100并且接合包裹以实现基于uav的包裹递送。在一些方面,并且如美国专利申请第15/582,200号(该申请的全部内容通过引用并入本文)中进一步解释的,包裹运送器200被配置为被临时固定到uav 100以用于运输包裹30(图1),并且可以包括电源,该电源被配置为当包裹运送器200与uav 100接合时给uav 100供电。在其他方面中,替代或者除了位于包裹运送器200中或联接到包裹运送器的电源之外,电源可以结合到或可拆卸地联接到uav 100。
26.uav 100可以说一般包括uav机架110和从uav机架110向外延伸的多个推进构件102。在一些方面中,推进构件102可以包括被配置为循环地操作一个或多个螺旋桨104的一个或多个旋翼或旋翼头。在多个方面中,螺旋桨104可以是固定螺距螺旋桨,其中uav 100可以通过改变旋翼的每分钟转数(rpm)和/或扭矩来实现各种推力水平。在其他方面中,螺旋桨104可以是可变/可控螺距螺旋桨(cpp),其中uav 100可以通过保持基本恒定的rpm但改变螺旋桨104的螺距来实现各种推力水平。uav机架110一般限定uav 100的主体,其中推进构件102被配置为在飞行期间提供并且保持升力和推进力。推进构件102能够在“开”配置与“关”配置之间操作,在“开”配置中,推进构件102可以以可变速度和/或螺距操作来提升uav 100,在“关”配置中,推进构件是静止的和/或不向uav 100提供升力。在又一些方面中,推进构件可以包括定向/矢量推力系统的任何一个或多个部分,该系统利用发动机排气(无论是方向可变的还是固定的)来提供推力。根据各种实施例,uav机架110可以由合适强度和重量的任何材料(包括可持续和可重复使用的材料)形成,包括但不限于复合材料、铝、钛、聚合物等,并且可以通过任何合适的工艺来形成。
27.多个推进构件102中的每一个推进构件都联接到uav机架110的上部114的周边并且围绕该周边延伸(清楚地见图3)。多个推进构件102中的每一个推进构件都包括定位在螺旋桨护栅内的螺旋桨104。每个螺旋桨104的组成有多个叶片,这些叶片被配置为在螺旋桨护栅内旋转,以提供升力并且促进uav 100的飞行。在所例示的实施例中,螺旋桨护栅在螺旋桨104旋转时包围螺旋桨104,这可以有助于防止螺旋桨104与uav 100在飞行期间可能遇
到的各种物体之间的无意接触。虽然图2所描绘的实施例将螺旋桨104描绘为包括被配置为在螺旋桨护栅内旋转的三个叶片,但是应当理解,螺旋桨104可以包括被配置为在螺旋桨护栅内旋转并且向uav 100提供足够的升力的任何合适数量的叶片。
28.在所例示的实施例中,推进构件102是电力驱动的(例如,由控制螺旋桨104旋转的速度和/或螺距的电动机驱动的)。然而,如将会认识到的,推进构件102可以由传动交流发电机、氢燃料电池等的内燃发动机驱动。在一些方面中,在特定配置中,推进构件可以固定到uav机架110;在其他方面中,每个推进构件102在接头处枢转地联接到uav机架110,使得每个推进构件102可以相对于uav机架110旋转和/或枢转。如图3所见,uav机架110可以限定上部114、下部118(定位在上部114下方)和喉部115(垂直定位在上部114与下部118之间)。进一步地,uav机架110一般可以被认为用于容纳uav操作所必需的一个或多个控制和飞行系统。
29.在一些方面中,诸如图2至图3所例示的,uav机架110的下部118可以被配置为接收并且接合包裹运送器200或任何其他类似的货物运送设备或有效载荷。在所例示的实施例中,下部118从uav机架的上部114向下延伸,并且像一个中空、倾斜的金字塔形构件。下部118限定向上延伸到下部118中的内腔。内腔限定底部开口,通过该开口可以接近内腔。包裹运送器200的至少一部分可以通过开口插入内腔,以便将包裹运送器200可拆卸地联接到uav机架110。
30.uav 100还可以包括一个或多个起落架116。在所例示的实施例中,起落架116设在uav机架的上部114的下侧或面向下的一侧。在所例示的实施例中,起落架116包括一对取向为在垂直方向上面向下的滚轮。在一些实施例中,起落架116的滚轮可以由uav驱动,以便沿着轨道系统200移动uav。在一些方面中,起落架116可以与喉部115协同工作,以建立并且保持uav在轨道系统200上的相对定位。在其他方面中,起落架116也可以定位在uav机架的喉部115的相对的垂直侧上,使得起落架116跨立于宽度减小的部分115。此外,在各种其他实施例中,起落架116可以包括被配置用于接合轨道系统200的其他设备,诸如相对于uav机架110旋转的轴承、脚轮等,它们可以在uav与轨道系统200接合时有助于移动uav机架110。
31.如图3所例示,uav 100可以包括一个或多个传感器164、一个或多个通信端口166和一个或多个摄像头168。尽管被例示在下部118上,但是可以设想,一个或多个传感器164、一个或多个通信端口166和/或一个或多个摄像头168一般可以定位在uav机架110或uav 100的任何合适的部分上。在多个方面中,一个或多个传感器164可以包括飞行控制传感器,诸如加速度计、罗盘、陀螺仪、定位系统等。在其他方面中,传感器164可以包括着陆传感器(诸如压力传感器、接近传感器等),该着陆传感器可以被配置为提供用于确定uav 100相对于轨道系统200的接近度或定位的输入。通信端口166提供用于与外部系统、计算机、组件、模块等通信的部件。通信端口166可以采取有线端口(例如,用于接收对应的公连接的母端口)或无线端口(例如,nfc、蓝牙、ir等)的形式。一个或多个摄像头168可以被uav 100利用以向飞行控制系统提供导航输入,可以被利用以拍摄用户/顾客感兴趣的物品,等。
32.iv.uav控制系统
33.现转到图4,例示了车载uav控制系统10的示例性方面的透视图。如图所例示,uav控制系统10包括至少一个轨道系统200,该至少一个轨道系统联接到车辆20(例如,包裹递送车)的面向外的表面22(例如,车顶)。尽管在本文中是在车载平台的背景下提及的,但是
可以设想,如本文所公开的,当前所公开的主题可以在其他平台上实施。如图所例示,轨道系统200可以包括单对轨道210或多对轨道。每对导轨210可以经由多个支腿214联接到面向外的表面30。在一些方面中,该对轨道210可以包括机车组件213,该机车组件被配置为将uav 100从轨道系统200的一部分移送到另一部分。在所例示的实施例中,机车组件213被示出为多个连续的动力式滚轮,其被配置为与uav 100的喉部115接合,并且在被回收之后相对于面向外的表面22将uav 100逐渐向后移动。
34.轨道系统200可以说被分成或特征在于多个功能部分。轨道系统200的最前的部分可以包括回收部分202。向后移动,轨道系统200可以包括卸载部分203、检查部分204和发射部分206。回收部分202被配置为允许uav 100在轨道系统200上着陆和/或进入轨道系统。在多个方面中,回收部分202的特征在于加宽开口和导向件,该导向件被配置为捕捉uav 100的喉部115并且将其引导到相对于机车组件213的适当协作方位。在成功回收并且与轨道系统200接合后,轨道系统200可以经由操作机车组件213将uav 100从回收部分202移送到卸载部分203。
35.卸载部分203可以包括用于接收空货物或货物运送器的第一开口14。例如,uav 100可以被配置为使用包裹运送器120执行包裹递送任务。任务完成后,包裹运送器120可以是空的,并且返回到uav控制系统10以供重新使用。当在卸载部分203中时,空包裹运送器120可以经由第一开口14返回到车辆20的内部车厢。尽管在本文中被称为卸载部分,但是在一些方面中,卸载部分203可以用来执行装载操作,其中新货物(诸如联接到包裹30的已装载包裹运送器120)可以从车辆20的内部车厢被取回并且联接到uav 100。在卸载部分203中完成卸载和/或装载操作之后,轨道系统200可以用来将uav 100从卸载部分203移送到检查部分204。
36.检查部分204的特征在于无人机诊断系统,该无人机诊断系统用来自主地或半自主地执行检查和维护程序。无人机诊断系统可以是传感器、装置和/或计算机处理组件的集合。概括地讲,无人机诊断系统可以包括摄像头220、重量传感器230、通信组件242和定位组件240中的任何一个或多个。在一个方面中,传感器、装置和/或计算机处理组件中的任何一个或多个可以集成到一对轨道210中、多个支腿214中的一个或多个中,和/或联接到车辆20的面向外的表面30。在其他方面中,参考图6至图7b更详细地描述的,无人机诊断系统可以采取自含式模块的形式,诸如图1的机库400。
37.无人机诊断系统可以包括一个或多个摄像头220。一个或多个摄像头220可以是单个类型或多个类型的。一个或多个摄像头220可以包括用来感知电磁(em)频谱的可见部分(例如,380nm
‑
750nm)中的电磁波的光学摄像头、用来检测热特征的红外照摄像头和/或x射线摄像头系统。一个或多个摄像头220可以用来执行任意数量的检查和维护检验。例如,一个或多个摄像头220可以用来检查每个螺旋桨104,以确定螺旋桨是否受到任何损坏或有缺陷。可以通过捕捉螺旋桨104的图像并且将捕捉的图像与同一螺旋桨的任务前图像和/或螺旋桨104的标准化图像进行比较来识别损坏和缺陷。该比较可以揭示螺旋桨104或uav机架110的裂纹、裂缝、碎片、翘曲、变色或任何其他类型缺陷的视觉指示。任何一个或多个所述视觉指示可以被称为“结构完整性数据”的总称。在一些方面中,无人机诊断系统可以利用机器学习或人工智能算法来执行基于摄像头的检查。
38.一个或多个摄像头220可以被利用以执行非结构检查和维护检验。在一个方面中,
无人机诊断系统可以向uav 110提供指令,以打开uav 110上的任何定位和/或导航灯,从而确定所述定位和/或导航灯是否正常工作。在另一方面中,无人机诊断系统可以向uav提供指令,以使其循环通过任何运动件,以检验它们的流体和准确运动。例如,无人机诊断系统可以向uav 100提供指令,以致动推进构件102的一个或多个旋翼。一个或多个摄像头220可以用来捕捉一个或多个图像或视频,以便确定螺旋桨和/或旋翼是否正在经历过度振动,这可能指示发动机轴、发动机支座、旋翼和/或螺旋桨上的缺陷。在另一示例中,无人机诊断系统可以向uav 100提供指令,以致动一个或多个飞行控制表面,诸如副翼、货物释放机构、起落架或uav 100的任何其他可移动组件。无人机诊断系统可以捕捉所述致动运动的一个或多个图像,以便确定可移动组件是否可能具有缺陷,这可以基于有限或断裂运动的识别或检测。
39.在其中无人机诊断系统包括红外摄像头或能够热成像的任何其他类型的摄像头的方面中,所述摄像头可以用作推进构件102的应力测试的一部分。也就是说,当被致动时,推进构件可以被热成像摄像头观察到,以便确定旋翼/发动机没有过热(即,它通过了应力测试)。热成像摄像头还可以用来检测电池温度是否在操作范围内和/或飞行控制器、传感器或uav100上的任何其他电子组件/电路的温度是否在操作范围或安全范围内操作。
40.无人机诊断系统还可以包括可以被配置为检测与uav 100相关联的重量和垂直拉力的一个或多个重量传感器230。基于从一个或多个重量传感器捕获、测量、确定或以其他方式获得的信息的任何一个或多个数据点可以被称为“飞行参数数据”的总称。在一个方面中,一个或多个重量传感器230可以集成到一对轨道210中。另选地,一个或多个重量传感器230可以定位在一对轨道210的一个或多个面向外的表面上,以便它们可以容易地被去除或替换。一个或多个重量传感器230可以是被配置为或能够测量或确定施加于一对轨道210上的重量和/或力的传感器(诸如应变仪、力仪、测压元件等)的任何组合。所述传感器中的一些传感器可以被配置为基于传感器的电阻、电容、阻抗等的测量变化来确定施加的重量或力。一个或多个传感器230中的每一个传感器可以通信地联接到与无人机诊断系统相关联的计算机处理组件,以便将测量值和/或确定传送至无人机诊断系统。
41.清楚地见图5,一个或多个重量传感器230可以定位在一对轨道210的顶部。例如,一个或多个重量传感器230可以包括第一重量传感器232和第二重量传感器234,该第一重量传感器和该第二重量传感器联接到或集成到一对轨道210的第一轨道211的顶面216中。一个或多个重量传感器也可以包括第三重量传感器236和第四重量传感器238,该第三重量传感器和该第四重量传感器联接到或集成到一对轨道210的第二轨道212的顶面中。重量传感器232
‑
238中的任何一个或多个传感器可以协同地工作以确定uav 100的向下的力/重量。例如,测量的一个或多个力可以被平均、相加或以其他方式组合,以便确定uav 100的当前重量(有或没有货物,诸如附有包裹的包裹运送器)是否超过最大起飞重量。重量传感器232
‑
238中的任何一个或多个传感器也可以用来识别重量/力的差异,该差异可以指示负载/货物相对于uav 100不平衡或未正确附接/存放。
42.因为uav 100完全由一对轨道210固定,所以一个或多个推进构件102可以被启动和操作,而不会使uav 100飞走。为了利用这种截留,一个或多个重量传感器230可以定位在或集成到一对轨道210的底面上,这将检测由推进构件102的操作产生的升力而得来的力或重量的大小。例如,如果每个推进构件102同时地被操作,则可以确定总的或平均的测量重
量或力,并且用来确定总升力。将总升力与标准进行比较,以确定uav 100是否在适当的参数范围内操作。如果当所有推进构件102被操作时,在一对轨道210的底部上的一个或多个重量传感器之间检测到差异,则无人驾驶飞机诊断系统可以确定一个或多个推进构件102具有由不均匀升力反映的故障。该故障可能是旋翼缺陷或uav 100的飞行控制器向推进构件102传送飞行控制指令的能力缺陷的结果。在另一方面中,推进构件102的一部分可以被操作,以便确定uav 100是否能够按需围绕三维轴偏航、俯仰、平移或以其他方式移动,从而成功执行任务。
43.见图4至图5,无人机诊断系统可以附加地包括一个或多个电子通信组件242。电子通信组件242可以包括到uav 100的有线或无线连接的任何组合,以便从uav 100获得电子状态信息。例如,电子通信组件可以包括具有有线连接(类似于加油吊杆)的致动构件,该致动构件可以被致动以便使有线连接用以联接到uav 100上的对应的通信端口166。在另一方面中,如果uav 100上的通信端口166是无线通信端口,则电子通信组件242可以包括对应的无线通信接收器/收发器。无论是有线、无线还是两者的组合,电子通信组件242使得无人机诊断系统能够获得有价值的飞行和uav状态信息。具体来讲,无人机诊断系统可以接收包括uav本地全机载系统自诊断、卫星定位信息、来自位于uav 100上的任何一个或多个传感器164的信息以及电池状态信息的信息。
44.uav 100可以被配置为执行本地机载系统自诊断。在此情况下,uav 100可以基于一系列内部测试或者基于uav在先前任务中的表现来识别任何一个或多个问题。此自诊断信息对于无人机诊断系统可能是有价值的,尤其是如果与无人机诊断系统的传感器不能够容易地检测或识别的特征、缺陷、故障等相关的话。uav 100可以配备有一个或多个定位指示传感器(例如,gps、蜂窝三角测量等),这些传感器向uav 100提供实时或近实时的定位信息。无人机诊断系统可以从uav 100接收关于其当前确定的定位的信息,同时被截留在轨道系统200的检查部分204中。该本地定位可以与无人机诊断系统经由靠近检查部分204的固定的定位指示传感器240获得/确定的定位进行比较。如果存在差异,则无人机诊断系统可以向uav 100提供校正信息(例如,校准新定位或提供增量,诸如用在d
‑
gps中)。
45.uav 100可以配备有一个或多个防撞传感器。当被截留在检查部分204中时,防撞传感器可以由从车辆20的面向外的表面22延伸的一个或多个物体触发。在一些方面中,位于车辆20的面向外的表面22上的一个或多个测试物体可以被致动,以便迫使防撞传感器被触发。一旦被触发,来自防撞传感器的信息可以被传送至无人机诊断系统,并且与车辆20的面向外的表面22上的物体的已知位置进行比较,以确保所述防撞传感器正确地检测潜在障碍物/危险的存在和范围。uav 100也可以被被配置为测量机载电池的电池电量或电池健康状况。如果是,uav 100可以将所述电池测量值传送至无人机诊断系统。
46.使用电子通信组件242或通过使用视线(los)/blos通信链路,可以测试被uav 100在任务期间用来与uav控制系统10通信的通信链路(例如,vhf、uhf)。uav 100可以被配置为记录飞行数据信息,包括任务、任务路径、任务事故、每个组件的生命周期管理和总飞行小时等。所述飞行数据信息可以被传送至无人机诊断系统。无人机诊断系统也可以向uav 100传送未来的飞行数据,包括针对下一次任务的飞行路径或飞行计划以及相对于当前电池电量的估计的飞行时间。
47.无人机诊断系统可以包括可用在uav 100的自主维修的附加特征。在一个方面中,
检查部分204或无人机诊断系统可以包括一个或多个异物和碎片(fod)去除组件。一个或多个fod组件可以是吹送压缩空气的喷嘴、刮水片、或者可以从uav 100的任何一个或多个部分去除fod(例如,灰尘和碎片)的任何其他接触或非接触组件,具体来讲,是防撞传感器和一个或多个摄像头168。
48.无人机诊断系统可以包括一个或多个计算机处理组件,该一个或多个计算机处理组件可以用来接收和/或处理来自本文描述的一个或多个传感器的测量值和/或确定。一个或多个计算机处理组件可以被配置为给每个检查和/或维护检验的结果打分。在一些方面中,得分可以是数字的(例如,在1到10的范围内);在其他方面中,每个得分可以是通过/未通过。如果被数字评分,则无人机诊断系统可以确定总检查得分,其中单独评分的结果被平均、相加或以其他方式合计以形成单个综合得分。可以将单个综合得分与安全操作阈值进行比较,以确定uav 100是否足够安全来操作。无人机诊断系统也可以具有一个或多个不安全操作阈值。当一个或多个单独评分的结果低于不安全阈值时,uav 100可以被确定为不安全或要求人工跟踪,并且被停飞(即,被阻止在后续任务中发射)。在通过/未通过评分系统中,如果每个单独评分的结果都是“通过”,则无人机诊断系统可以确定uav 100对于后续任务足够安全。
49.在检查部分204中完成诊断操作之后,轨道系统200可以用来将uav100从检查部分204移送到发射部分206。如果无人机诊断系统确定uav 100的状况超过安全操作阈值,则发射部分206可以被配置为允许uav 100发射用于后续任务。如果无人机诊断确定uav 100的状况低于安全操作阈值,则uav 100可以经由车辆20的面向外的表面22中的第二开口16存放。应当注意,在车辆20的面向外的表面22中可以存在更多或更少的开口,以便促进装载和卸载操作。例如,第三开口可以位于卸载部分203与检查部分204之间,以便将新货物或有效载荷装载到uav 100(例如,运送包裹30的包裹运送器200)上。
50.现转到图6至图7b,根据本文中的实施例例示了自含式无人机诊断系统。可能期望无人机诊断系统完全且独立地被包含在单个模块中,使得该模块可以容易地去除、维修等,或者为被包含在其中的一个或多个传感器提供免受元件影响的保护。在多个方面中,自含式无人机诊断系统可以包括机库400,该机库可以至少部分地围住检查部分204的至少一部分。在一些方面中,机库400可以装备有除尘组件402,诸如刷子/刷毛,以在uav100进入机库400时从其上去除fod。自含式实施例可以具有相对于图4至图5描述的传感器、装置和计算机处理组件中的任何一个或多个。一个或多个摄像头204可以联接到轨道410,这对于自含式实施例是独特的。在见图7a的方面中,一个或多个摄像头204可以被配置为围绕轨道移动,以便获得用于捕捉本文描述的各种图像的期望角度。在图7b中示出的另一方面中,一个或多个摄像头204可以固定到轨道410的特定位置,以便获得用于捕捉本文描述的各种图像的期望角度。
51.v.使用方法
52.参考图8,根据本文的各方面,表示了一种用于自主无人机诊断的方法。方法800可以始于框802,在如上所述的车载uav控制系统的车顶安装轨道的回收部分中回收uav。在框804,uav被从回收部分移送到检查站或检查部分。当处于检查部分中时,在框806,uav可以经历任何一个或多个适航性检查、测试、维护检验等,如本文针对图4至图7b所描述的。在完成框808中的操作后,uav被移送到发射区域,诸如图4的发射部分206。在框810,如果无人机
诊断系统提供uav对于后续任务足够安全的指示,如相对于图4所描述的,则uav在新任务中从车载uav控制系统发射。如果确定uav对于操作不够安全,则uav可以被存放在车载uav控制系统的车厢中。在每个成功完成的任务之后,方法800可以对每个uav重复。
53.vi.计算设备
54.参考图9,示出了用于实施本发明实施例的示例性操作环境,并且一般被指定为计算设备900。计算设备900只是合适的计算环境的一个示例,并且不旨在暗示对本发明的使用范围或功能性的任何限制。计算设备900也不应被解释为对所例示组件中的任何一个组件或组合有任何依赖性或要求。
55.本发明可以在计算机代码或机器可用指令的一般内容中被描述,包括由计算机或其他机器(诸如个人数据助理或其他手持设备)执行的计算机可执行指令,诸如程序模块。一般来讲,包括例程、程序、对象、组件、数据结构等的程序模块指的是执行特定任务或实施特定抽象数据类型的代码。本发明可以在多种系统配置中实践,包括手持设备、消费电子器件、通用计算机、更专业的计算设备等。本发明也可以在分布式计算环境中实践,其中任务由通过通信网络链接起来的远程处理设备执行。
56.参考图9,计算设备900包括直接或间接联接以下设备的总线910:存储器912、一个或多个处理器914、一个或多个呈现组件916、输入/输出端口918、输入/输出组件920和例示性电源922。总线910表示一个或多个总线(诸如地址总线、数据总线或它们的组合)。尽管为了清楚起见,图9的各种框用线来示出,但实际上,勾画各种组件并不太清楚,并且比喻来讲,线更准确来讲是灰色和模糊的。例如,可以将诸如显示设备之类的呈现组件视为i/o组件。同样,处理器具有存储器。可以认识到这是本领域的本质,并且重申图9的图示仅仅是可以结合本发明的一个或多个实施例使用的示例性计算设备的例示。在诸如“工作站”、“服务器”、“笔记本电脑”、“手持设备”等类别之间不作区分,因为所有这些都被设想在图9和对“计算设备”的引用的范围内。
57.计算设备900通常包括多种计算机可读介质。计算机可读介质可以是可以由计算设备900访问的任何可用介质,并且包括易失性和非易失性介质、可移动和不可移动介质两者。举例来说而非限制,计算机可读介质可以包括计算机存储介质和通信介质。
58.计算机存储介质包括以任何方法或技术实施的易失性和非易失性介质、可移动和不可移动介质,以用于存储诸如计算机可读指令、数据结构、程序模块或其他数据之类的信息。计算机存储介质包括但不限于ram、rom、eeprom、闪存或其他存储技术、cd
‑
rom、数字多功能盘(dvd)或其他光盘存储、盒式磁带、磁带、磁盘存储或其他磁存储设备,或可以用来存储期望信息并且可以由计算设备900访问的任何其他介质。计算机存储介质不包括信号本身。
59.通信介质通常以诸如载波或其他传输机制之类的经调制的数据信号来体现计算机可读指令、数据接收、程序模块或其他数据,并且包括任何信息递送介质。术语“经调制的数据信号”意指一种信号,该信号使其一个或多个特性以对信号中的信息进行编码的方式设置或改变。举例来说而非限制,通信介质包括诸如有线网络或直接有线连接之类的有线介质,以及诸如声学、射频(rf)、红外和其他无线介质之类的无线介质。以上各项中的任一个的组合也应被包括在计算机可读介质的范围内。
60.存储器912包括易失性和/或非易失性存储器形式的计算机存储介质。存储器可以
是可移动的、不可移动的或它们的组合。示例性硬件设备包括固态存储器、硬盘驱动器、光盘驱动器等。计算设备900包括从诸如存储器912或i/o组件920之类的各种实体读取数据的一个或多个处理器。呈现组件916向用户或其他设备呈现数据指示。示例性呈现组件包括显示设备、扬声器、打印组件、振动组件等。
61.i/o端口918允许计算设备900用以被逻辑联接到包括i/o组件920的其他设备,其中的一些可以内置。例示性组件包括摄像头、重量传感器、卫星定位系统、外部通信组件和/或本文中描述的一个或多个电子诊断组件。附加组件可以包括麦克风、操纵杆、游戏手柄、圆盘式卫星天线、扫描仪、打印机、无线设备等。
62.以上段落中描述的实施例可以与一个或多个具体描述的替代方案相结合。具体地,所要求保护的实施例可以包含对多于一个的其他实施例的引用。所要求保护的实施例可以指定所要求保护的主题的进一步限制。
63.本文具体描述了本发明实施例的主题,以满足法定要求。然而,本描述本身并不旨在限制本专利的范围。相反,发明人已经考虑到,所要求保护的主题也可以以其他方式体现,以包括不同的步骤或类似于本文件中描述的步骤的步骤组合,以结合其他当前或未来的技术。此外,尽管术语“步骤”和/或“框”在本文中可以用来表示所采用的方法的不同元素,但是这些术语不应该被解释为意指本文公开的各种步骤当中或之间的任何特定顺序,除非明确描述了各个步骤的顺序。
64.贯穿本公开,除非另有相反指示,否则诸如“一”和“一个”的词语包括复数以及单数。因此,例如,在存在一个或多个特征的情况下,满足“特征”的约束。同样,术语“或”包括连接词、非连接词和两者(a或b因此包括a或b,以及a和b)。
65.已经针对特定实施例描述了本发明的实施例,这些实施例在所有方面中都旨在例示性的,而不是限制性的。对于本发明所属领域的普通技术人员来说,替代实施例将变得显而易见,而不脱离其范围。
66.从上文可以看出,本发明很好地适用于达到上文阐述的所有目的和目标,以及其它明显的和结构固有的优点。
67.应当理解,某些特征和子组合是实用的,并且可以在不参考其他特征或子组合的情况下采用。这是权利要求所设想的并且在权利要求的范围内。所描述的技术可以在不脱离范围的情况下进行,应当理解,本文描述的或附图中例示的所有内容都应被解释为例示性的,而不是限制性的。