1.本新型涉及一种旋翼无人机用降落减震架,属无人机技术领域。
背景技术:
2.旋翼式无人机在航空测绘、农业生产、航空拍摄等领域中有着广泛的用途,但由于旋翼式无人机在起飞和降落时均是通过承载架直接与地面着落场地接触,从而导致该类无人机在降落过程中,极易因无人机自重、地表气流干扰及操作不当等因素对无人机及机载设备产生较大的冲击作用力;同时由于地表着陆场地相对较为复杂,尤其是在野外操作及应急着落作业时,着陆场地地表结构复杂,从而极易导致无极人承载架无法有效适应着落场地而导致无人机承受较冲击作用力的同时,还极易造成无人机倾斜甚至侧翻等情况发生,而针对这一现状,当前尚无可同时解决对无人机着陆有效减震和实现对着陆产地环境灵活匹配适应的无人机用起落架设备,因此给无人机设备的使用造成了较大的限制和困扰。
3.因此针对这一问题,迫切需要开发一种全新的通讯线缆检测设备及方法,以满足实际使用的需要。
技术实现要素:
4.为了解决现有技术上的不足,本新型提供了一种旋翼无人机用降落减震架,该新型设备结构简单,使用灵活方便,通用性好、且自重小,可有效的节省无人机设备的载荷,同时一方面可有效满足多种类型无人机设备配套运行及多种复杂场地降落作业的需要,并实现在降落过程中对复杂着陆场地的自适应性,提高无人机降落作业的灵活性和可靠性;另一方面在具有良好的承载能力的同时,另可有效的实现对降落作业时产生的机械振动作用力进行吸收减震,从而达到防止机械振动作用力对无人机机载设备造成的冲击损害,极大的提高无人机设备运行的稳定性和可靠性。
5.为了实现上述目的,本实用新型是通过如下的技术方案来实现:
6.一种旋翼无人机用降落减震架,包括连接滑轨、承载横担、减震柱、承载底托、缓冲弹簧柱,连接滑轨至少两条,各连接滑轨间相互平行分布,承载横担共两个,两承载横担间平行分布并对称分布在连接滑轨中点两侧,其上端面通过滑块与连接滑轨滑动连接,且承载横担轴线与连接滑轨轴线垂直分布,连接滑轨内设至少一条与连接滑轨同轴分布的缓冲弹簧柱,缓冲弹簧柱两端与滑块侧表面连接并与滑块侧表面垂直分布,承载横担下端面与至少两条减震柱连接,减震柱上端面通过弹性铰链与承载横横担下端面铰接,其轴线与承载横担轴线呈0
°
—90
°
夹角,且同一承载横担连接的各减震柱沿承载横担轴线方向均布,两承载横担连接的各减震柱间以连接滑轨中点对称分布,减震柱下端面通过弹性铰链与承载底托上端面铰接,承载底托下端面与水平面呈0
°
—135
°
夹角,其上端面与减震柱轴线呈0
°
—120
°
夹角。
7.进一步的,所述的减震柱中,以连接滑轨中点对称分布的两条减震柱间轴线呈
45
°
—135
°
夹角并相交,交点位于连接滑轨上方至少10毫米处,且以连接滑轨中点对称分布的两条减震柱下端面之间间距为两承载横担之间间距的至少1.5倍。
8.进一步的,所述的减震柱包括连接弹簧、压簧、导向环、承载杆,其中所述连接弹簧上端面通过弹性铰链与承载横担下端面连接,下端面与导向环连接,所述导向环与连接弹簧内侧面连接,其轴线与连接弹簧轴线平行分布,所述承载杆嵌导向环内并与导向环同轴分布,其上端面位于导向环上端面外并与压簧下端面连接,所述压簧与承载杆同轴分布,其上端面与连接弹簧内侧面连接,所述导向杆下端面位于导向环下端面外,并通过弹性铰链与承载底托上端面连接,且导向环下端面位置承载杆长度为导向环上端面位置承载杆长度的至少1.5倍。
9.进一步的,所述的连接弹簧为横断面呈矩形的弹片、螺旋弹簧柱结构中的任意一种。
10.进一步的,所述的承载底托包括调节承载板、辅助承载板,其中所述调节承载板为横断面呈圆弧状板状结构,其上端面通过弹性铰链与减震柱下端面铰接,且减震柱轴线沿调节承载板直径方向分布,所述调节承载板侧表面通过至少一个弹性铰链与辅助承载板铰接,所述辅助承载板上端面与减震柱呈0
°
—90
°
夹角,并位于两承载横担之间位置,所述辅助承载板下端面为矩形平面结构,并与调节承载板外侧面平齐分布,所述辅助承载板上端面设横断面呈“凵”字形的限位槽,且当辅助承载板上端面与减震柱间夹角为0
°
时,减震柱下半部分嵌于限位槽内并与限位槽同轴分布,且位于限位槽内的减震柱长度为减震柱总长度的10%—60%。
11.进一步的,所述的承载横担两端面上端面另设弹性垫块,所述弹性垫块上端面比连接滑轨上端面高0—10毫米。
12.本新型设备结构简单,使用灵活方便,通用性好、且自重小,可有效的节省无人机设备的载荷,同时一方面可有效满足多种类型无人机设备配套运行及多种复杂场地降落作业的需要,并实现在降落过程中对复杂着陆场地的自适应性,提高无人机降落作业的灵活性和可靠性;另一方面在具有良好的承载能力的同时,另可有效的实现对降落作业时产生的机械振动作用力进行吸收减震,从而达到防止机械振动作用力对无人机机载设备造成的冲击损害,极大的提高无人机设备运行的稳定性和可靠性。
附图说明
13.下面结合附图和具体实施方式来详细说明本发明;
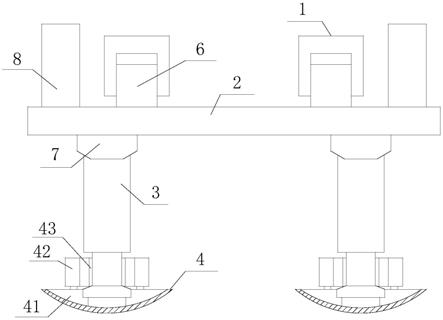
14.图1为本新型主视结构示意图;
15.图2为本新型侧视结构示意图。
具体实施方式
16.为使本发明实现的技术手段、创作特征、达成目的与功效易于施工,下面结合具体实施方式,进一步阐述本发明。
17.如图1和2所示,一种旋翼无人机用降落减震架,包括连接滑轨1、承载横担2、减震柱3、承载底托4、缓冲弹簧柱5,连接滑轨1至少两条,各连接滑轨1间相互平行分布,承载横担2共两个,两承载横担2间平行分布并对称分布在连接滑轨1中点两侧,其上端面通过滑块
6与连接滑轨1滑动连接,且承载横担2轴线与连接滑轨1轴线垂直分布,连接滑轨1内设至少一条与连接滑轨1同轴分布的缓冲弹簧柱5,缓冲弹簧柱5两端与滑块6侧表面连接并与滑块6侧表面垂直分布,承载横担2下端面与至少两条减震柱3连接,减震柱3上端面通过弹性铰链7与承载横横担2下端面铰接,其轴线与承载横担2轴线呈0
°
—90
°
夹角,且同一承载横担2连接的各减震柱3沿承载横担2轴线方向均布,两承载横担2连接的各减震柱3间以连接滑轨1中点对称分布,减震柱3下端面通过弹性铰链7与承载底托4上端面铰接,承载底托4下端面与水平面呈0
°
—135
°
夹角,其上端面与减震柱3轴线呈0
°
—120
°
夹角。
18.本实施例中,所述的减震柱3中,以连接滑轨1中点对称分布的两条减震柱3间轴线呈45
°
—135
°
夹角并相交,交点位于连接滑轨1上方至少10毫米处,且以连接滑轨1中点对称分布的两条减震柱3下端面之间间距为两承载横担2之间间距的至少1.5倍。
19.重点说明的,所述的减震柱3包括连接弹簧31、压簧32、导向环33、承载杆34,其中所述连接弹簧31上端面通过弹性铰链7与承载横担2下端面连接,下端面与导向环33连接,所述导向环33与连接弹簧31内侧面连接,其轴线与连接弹簧31轴线平行分布,所述承载杆34嵌导向环33内并与导向环33同轴分布,其上端面位于导向环33上端面外并与压簧32下端面连接,所述压簧32与承载杆34同轴分布,其上端面与连接弹簧31内侧面连接,所述导向杆34下端面位于导向环33下端面外,并通过弹性铰链7与承载底托4上端面连接,且导向环33下端面位置承载杆34长度为导向环33上端面位置承载杆34长度的至少1.5倍。
20.进一步优化的,所述的连接弹簧31为横断面呈矩形的弹片、螺旋弹簧柱结构中的任意一种。
21.与此同时,所述的承载底托4包括调节承载板41、辅助承载板42,其中所述调节承载板41为横断面呈圆弧状板状结构,其上端面通过弹性铰链7与减震柱3下端面铰接,且减震柱3轴线沿调节承载板41直径方向分布,所述调节承载板41侧表面通过至少一个弹性铰链42与辅助承载板42铰接,所述辅助承载板42上端面与减震柱3呈0
°
—90
°
夹角,并位于两承载横担2之间位置,所述辅助承载板42下端面为矩形平面结构,并与调节承载板41外侧面平齐分布,所述辅助承载板42上端面设横断面呈“凵”字形的限位槽43,且当辅助承载板42上端面与减震柱3间夹角为0
°
时,减震柱3下半部分嵌于限位槽43内并与限位槽43同轴分布,且位于限位槽43内的减震柱3长度为减震柱3总长度的10%—60%。
22.进一步优化的,所述辅助承载板42长度不大于两承载横担2之间间距的1/3。
23.本实施例中,所述的承载横担2两端面上端面另设弹性垫块8,所述弹性垫块8上端面比连接滑轨1上端面高0—10毫米。
24.本新型在具体实施中,首先对构成本新型的连接滑轨、承载横担、减震柱、承载底托、缓冲弹簧柱进行组装,然后将组装后的本新型安装到无人机设备的下端面并与无人机同轴分布,同时使承载横横担通过天性垫块与无人机下端面进行相抵并弹性连接。同时调整无人机与本新型连接后的重心位于本新型上端面下方10毫米—上方10毫米处,并位于无人机设备中心下方至少5毫米处。
25.在组装过程中,根据无人机运行时的最大自重重量,设定减震柱的连接弹簧的弹性形变作用力为无人机运行时的最大自重重量的0.8—1.5倍,压簧的弹性形变作用力为无人机运行时的最大自重重量的1.1—1.5倍,所述缓冲弹簧柱的弹性形变作用力为无人机运行时的最大自重重量的0.9—1.1倍。
26.本新型在运行中,当无人机设备在降落作业时,本新型的承载底托直接与着落场地间相抵,并随着无人机设备下降时承载底托承受的重力增加,承载底托与减震柱间通过弹性铰链翻转并发生相对位移,使承载底托的托调节承载板在与地面接触的同时,使辅助承载板位于减震柱与地面直接位置或直接与地面接触,通过调整辅助承载板的位置为承载底托与地面接触时中心配重调整,或直接与地平面接触,从而达到承载托盘与地平面接触定位的稳定性;
27.同时在无人机下降过程中受到外力冲击振动时,一方面通过减震柱的连接弹簧和压簧直接对冲击作用力进行减震吸收;另一方面通过承载杆、导向环及压簧相互配合,实现承载杆在冲击作用力下进行伸缩位移,进一步对冲击减震作业的同时,另可实现根据着落场地地平面结构灵活调整各减震柱的长度,从而达到满足对不同坐落场地降落时的调整及适应能力。
28.此外,减震柱在受到冲击作用力时,减震柱无法吸收的冲击作用力沿减震柱轴线方向传递至承载横担,使承载横担在冲击作用力下沿连接滑轨进行进行水平位移,从而达到改变冲击作用力方向,避免冲击作用力对无人机设备造成的损伤,同时在承载横担沿连接滑轨进行水平位移时,另通过缓冲弹簧柱对冲击作用力进行吸收减震作业。
29.本新型设备结构简单,使用灵活方便,通用性好、且自重小,可有效的节省无人机设备的载荷,同时一方面可有效满足多种类型无人机设备配套运行及多种复杂场地降落作业的需要,并实现在降落过程中对复杂着陆场地的自适应性,提高无人机降落作业的灵活性和可靠性;另一方面在具有良好的承载能力的同时,另可有效的实现对降落作业时产生的机械振动作用力进行吸收减震,从而达到防止机械振动作用力对无人机机载设备造成的冲击损害,极大的提高无人机设备运行的稳定性和可靠性。
30.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。