1.本发明涉及多栖机器人技术领域,尤其是涉及一种水陆空三栖机器人装置。
背景技术:
2.机器人系统以功能及系统实现为载体,通过自主或半自主的感知、移动、操作或人机交互,体现类似于人或是生物的智能水平;它能够扩展人在尺度、时间、空间、环境、情感、智能以及精度、速度、动力等方面所受到的约束和限制,并为人服务。
3.为突破机器人的应用领域限制,目前主要针对智能多栖机器人进行研究,其中的三栖机器人方案主要集中在水面、陆地和空中运动模块的复合,此类三栖机器人都存在模块复杂、作用单一,且模块所需舵机动力源多的缺点。比如中国专利cn112498681a公开了一种水陆空三栖机器人,包括:陆地行驶模块、水面驱动模块、空中飞行模块、电控与感知模块、起落架模块和水面漂浮模块,该方案采用前轮转向、后轮驱动的方式实现机器人在陆地上的全方向运动;采用双舵机控制的方式实现rov水下推进器的升降与转向,并利用rov水下推进器推动螺旋桨高速旋转,实现机器人在水上的全方向运动;采用可伸缩的四旋翼空中飞行模块实现机器人的飞行功能;利用nuc电脑向水陆模块控制板、飞行控制板和起落架模块发布控制指令,实现机器人的全自主运动。
4.尽管上述方案中的三栖机器人能够适用于地面模式、水面模式和空中模式作业,但其不同模式对应的功能模块较为复杂,且所需的舵机数量较多,导致整个三栖机器人的结构复杂,不利于简单可靠地实现多栖作业模式。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种水陆空三栖机器人装置,通过整合不同模式作业对应的功能模块,使得同一舵机能够对应于完成多项作业,从而有效简化机器人的结构,同时保证机器人的作业可靠性。
6.本发明的目的可以通过以下技术方案来实现:一种水陆空三栖机器人装置,包括六旋翼飞行组件,所述六旋翼飞行组件的顶部安装有gps定位组件和摄像头,所述六旋翼飞行组件的底部安装有水陆复合组件,所述水陆复合组件上安装有视觉定位装置,所述六旋翼飞行组件和水陆复合组件分别与控制器单元连接,所述六旋翼飞行组件、gps定位组件、水陆复合组件、视觉定位装置和控制器单元分别与电源组件相连接。
7.进一步地,所述六旋翼飞行组件包括飞行机架,所述飞行机架的两侧设置有左侧旋翼部和右侧旋翼部,所述左侧旋翼部和右侧旋翼部分别包括三个旋翼组件,所述旋翼组件包括飞行臂,所述飞行臂的一端与飞行机架连接,所述飞行臂的另一端安装有旋翼电机,所述旋翼电机的输出轴连接有螺旋桨叶。
8.进一步地,所述飞行机架上开设有环向孔,所述飞行臂通过连接件与对应的环向孔固接,所述旋翼电机通过电机座安装在飞行臂上。
9.进一步地,所述水陆复合组件包括顶板,所述顶板上安装有固定机架,所述固定机
架的两端分别安装有左侧螺旋推进模组、右侧螺旋推进模组。
10.进一步地,所述左侧螺旋推进模组包括左侧螺旋推进电机和依次连接的四节左旋杆,所述四节左旋杆之间通过节间悬挂连接件进行连接,所述四节左旋杆的尾部连接有末端悬挂连接件,所述左侧螺旋推进电机安装在固定机架上,由左侧螺旋推进电机带动四节左旋杆发生转动。
11.进一步地,所述右侧螺旋推进模组包括右侧螺旋推进电机和依次连接的四节右旋杆,所述四节右旋杆之间通过节间悬挂连接件进行连接,所述四节右旋杆的尾部连接有末端悬挂连接件,所述右侧螺旋推进电机安装在固定机架上,由右侧螺旋推进电机带动四节右旋杆发生转动。
12.进一步地,所述左旋杆包括转动轴,所述转动轴的两端安装有轴盖,所述转动轴上套设有第一套筒,所述第一套筒的外表面上设置有左旋螺旋状叶片以及沿周向均匀布置的12道桨片,所述第一套筒的两端分别通过螺母与套筒盖固定连接。
13.进一步地,所述右旋杆包括转动轴,所述转动轴的两端安装有轴盖,所述转动轴上套设有第二套筒,所述第二套筒的外表面上设置有右旋螺旋状叶片以及沿周向均匀布置的12道桨片,所述第二套筒的两端分别通过螺母与套筒盖固定连接。
14.进一步地,所述节间悬挂连接件包括依次连接的第一法兰和第一气动伸缩杆,所述第一气动伸缩杆的下端通过第一滚动轴承配合连接有伸缩型万向连轴器,所述第一气动伸缩杆上套设有第一弹簧,所述第一法兰通过螺栓与顶板固定连接,所述伸缩型万向连轴器的两端分别与两节左旋杆或两节右旋杆连接。
15.进一步地,所述末端悬挂连接件包括依次连接的第二法兰和第二气动伸缩杆,所述第二气动伸缩杆上套设有第二弹簧,所述第二气动伸缩杆的下端通过第二滚动轴承配合连接有传动轴,所述传动轴的一端安装有轴承盖,所述传动轴的另一端连接有十字万向连轴器,所述十字万向连轴器与左旋杆或右旋杆连接。
16.与现有技术相比,本发明具有以下优点:
17.一、本发明通过设置六旋翼飞行组件,在六旋翼飞行组件的底部安装水陆复合组件,以此实现水陆空三栖模式的运动作业,其中,水陆复合组件采用左右侧螺旋推进设计,只需依靠对应于左右两侧的两个推进电机,就能够在陆地或水中可靠地推进移动,从而大大简化装置结构,同时保证机器人的作业可靠性。
18.二、本发明在水陆复合组件中设置依次连接的四节螺旋杆,并在螺旋杆之间设置节间悬挂连接件、在螺旋杆连接尾部设置末端悬挂连接件,以此能够提高整个机器人装置的行动安全性和容错能力,即使某个螺旋杆发生故障,也不会影响机器人的水陆空三栖行走能力。
19.三、本发明通过将多节螺旋杆依次连接,使得机器人能够在垂直于地面的方向产生高度差及角度差,从而能够更好地适用于复杂崎岖地面,提高陆地行走能力。
附图说明
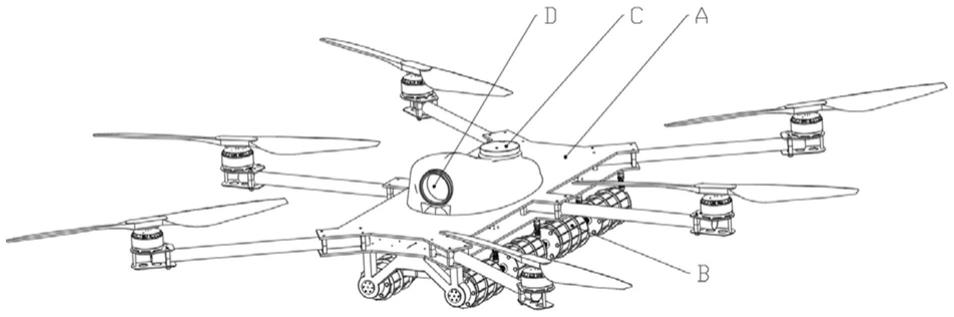
20.图1为本发明的外形结构示意图;
21.图2为本发明的侧视结构示意图;
22.图3为本发明的俯视结构示意图;
23.图4为本发明中六旋翼飞行组件的结构示意图;
24.图5为本发明中水陆复合组件的结构示意图;
25.图6为本发明中控制器单元的连接结构示意图;
26.图7为本发明中左旋杆的结构示意图;
27.图8为本发明中右旋杆的结构示意图;
28.图9为本发明中节间悬挂连接件的结构示意图;
29.图10为本发明中末端悬挂连接件的结构示意图;
30.图11为本发明中机器人运动方向示意图;
31.图中标记说明:a、六旋翼飞行组件,b、水陆复合组件,c、gps定位组件,d、摄像头,e、电源组件,f、控制器单元,g、视觉定位装置,100、飞行机架,200、旋翼组件,201、飞行臂,202、电机座,203、旋翼电机,204、螺旋桨叶,300、固定机架,400、顶板,500、左侧螺旋推进模组,600、右侧螺旋推进模组,510、左侧螺旋推进电机,610、右侧螺旋推进电机,520、节间悬挂连接件,530、左旋杆,540、末端悬挂连接件,521、第一法兰,522、第一气动伸缩杆,523、第一弹簧,524、第一滚动轴承,525、伸缩型万向连轴器,531、第一套筒,532、套筒盖,533、螺母,534、转动轴,535、轴盖,536、左旋螺旋状叶片,537、桨片,541、第二法兰,542、第二气动伸缩杆,543、第二弹簧,544、第二滚动轴承,545、传动轴,546、轴承盖,547、十字万向连轴器,620、右旋杆,621、第二套筒,622、右旋螺旋状叶片。
具体实施方式
32.下面结合附图和具体实施例对本发明进行详细说明。
33.实施例
34.如图1~图3所示,一种水陆空三栖机器人装置,由六旋翼飞行组件a、水陆复合组件b、gps定位组件c、摄像头d、电源组件e、控制器单元f、视觉定位装置g组成。其中,六旋翼飞行组件a的下方与水陆复合组件b固定连接,六旋翼飞行组件a的上方固接gps定位组件c和摄像头组件d;水陆复合组件b固接有可替换的电源组件e和控制器单元f,水陆复合组件b的下方与视觉定位装置g固定连接。
35.如图4所示,六旋翼飞行组件a由飞行机架100和6个均布的旋翼组件200组成,每个旋翼组件200由完全相同的飞行臂201、电机座202、旋翼电机203和螺旋桨叶204组成,其中每个旋翼组件的飞行臂201的一头通过连接件与飞行机架100上均布的环向孔固接,飞行臂201的另一头与电机座202固接,电机座202内安有旋翼电机203,旋翼电机203与螺旋桨叶204的安装孔固接。其中,螺旋桨叶204有正向和反向两种旋转类型,用以飞行时平衡旋转扭矩。
36.如图5所示,水陆复合组件b由前侧固定机架300、顶板400、左侧螺旋推进模组500及右侧螺旋推进模组600组成。其中,左侧螺旋推进模组500由左侧螺旋推进电机510、三节相同节间悬挂连接件520、四节左旋杆530和末端悬挂连接件540组成;
37.左侧螺旋推进模组500的最前侧传动轴由前侧传动机架300通过左侧螺旋推进电机510通过带传动而转动,左侧螺旋推进电机510与前侧固定机架300固定连接;
38.右侧螺旋推进模组600由右侧螺旋推进电机610、三节相同节间悬挂连接装置520、四节右旋螺旋杆节620和末端悬挂连接装置540组成;
39.右侧螺旋推进模组600的最前侧传动轴由前侧固定机架300通过右侧螺旋推进电机610通过带传动而转动,右侧螺旋推进电机610与前侧固定机架300固定连接。
40.在实际应用中,如图6所示,控制器单元f从配置的接收器单元接收控制信号,以分别控制水陆空三栖机器人中六个相同的无人机旋翼电机203、左侧螺旋推进电机510和右侧螺旋推进电机610。
41.如图7所示,单个左旋杆530由第一套筒531、2个套筒盖532、12个螺母533、转动轴534和2个轴盖535组成。每个第一套筒531上设有左旋螺旋状叶片536和12道均布在杆节周向的桨片537,杆节转动轴534带动左旋螺旋杆节530整体旋转。
42.如图8所示,单个右旋杆上620由第二套筒621、2个套筒盖532、12个螺母533、转动轴534和2个轴盖535组成。每个第二套筒621上设有右旋螺旋状叶片622和12道均布在杆节周向的桨片537,杆节转动轴534带动右旋螺旋杆节620整体旋转。
43.如图9所示,节间悬挂连接件520由第一法兰521、第一气动伸缩杆522、第一弹簧523、第一滚动轴承524和伸缩型万向连轴器组成525。第一法兰521底部与顶板400下端通过螺栓固接,第一气动伸缩杆522的上端与第一法兰521固接,第一气动伸缩杆522下端固定有第一滚动轴承524,第一滚动轴承524与伸缩型万向联轴器525中的伸缩轴端过渡配合。
44.相邻的左旋杆530中的杆节转动轴534通过节间悬挂连接件520中的伸缩型万向联轴器525相互连接并传递转动;相邻的右旋杆620中的杆节转动轴534同样通过节间悬挂连接件520中的伸缩型万向联轴器525相互连接并传递转动。
45.如图10所示,末端悬挂连接件540由第二法兰541、第二气动伸缩杆542、第二弹簧543、第二滚动轴承544、传动轴545、轴承盖546和十字万向连轴器组成547,左侧螺旋推进模组500的最后侧传动轴与末端悬挂连接件540的十字万向连轴器547相连接。
46.右侧螺旋推进模组600的末端悬挂连接件540的组成和作用与左侧螺旋推进模组500的末端悬挂连接件540一致。右侧螺旋推进模组500的最后侧传动轴与末端悬挂连接件540的十字万向连轴器547相连接。
47.上述机器人装置的具体工作原理为:
48.飞行时,六旋翼飞行组件a为水陆空三栖机器人提供飞行动力。
49.水陆复合组件b在陆地上前进状态时,左侧螺旋推进电机510顺时针转动,右侧螺旋推进电机610逆时针转动,分别带动左侧所有螺旋杆节顺时针转动与右侧所有螺旋杆节逆时针转动,垂直轴方向的力相互抵消,同时产生向后的推动力,陆地对水陆空三栖机器人产生向前的摩擦力作为反作用力,推动机器人向前行进。
50.水陆复合组件b在陆地上后退状态时,左侧螺旋推进电机510逆时针转动,右侧螺旋推进电机610顺时针转动,分别带动左侧所有螺旋杆节逆时针转动与右侧所有螺旋杆节顺时针转动,垂直轴方向的力相互抵消,同时产生向前的推动力,陆地对水陆空三栖机器人产生向后的摩擦力作为反作用力,推动机器人向后行进。
51.水陆复合组件b在陆地上转弯状态时,以左转为例,左侧螺旋推进电机510顺时针转动,右侧螺旋推进电机610逆时针转动,同时要求右侧螺旋推进电机610的实时工作功率大于左侧螺旋推进电机510的实时工作功率,实现左右两侧差速运动,使水陆空三栖机器人向左侧运动。
52.而水陆复合组件b中的节间悬挂连接件520中的第一气动伸缩杆522与第一弹簧
523可以令杆节与杆节之间存在竖直面高度差和角度差,而伸缩型万向联轴器525保证了杆件上下位移时仍能转动且不会产生水平面的位移,同时补偿了轴向间距离,使模组具有较好的复杂地形自适应能力。
53.利用两侧螺旋状布置叶片和螺旋旋向相反的特性,在陆地上行驶时通过控制两侧模组的转向和转速,实现陆面全方向移动。
54.如图11所示,水陆复合组件b在水中运动状态时,以陆地中的前进朝北方向视为水中的左侧方向朝西,以陆地中的右侧朝东方向视为水中的前进方向朝北。
55.水陆复合组件b在水中前进状态时,左侧螺旋推进电机510顺时针转动,右侧螺旋推进电机610顺时针转动,左旋螺旋状布置叶片536与右旋螺旋状布置叶片622产生的所有力都相互抵消,两侧均布在杆节周向的桨片537向后滚动排水,推动水陆空三栖机器人水中前进。
56.水陆复合组件b在水中后退状态时,左侧螺旋推进电机510逆时针转动,右侧螺旋推进电机610逆时针转动,左旋螺旋状布置叶片536与右旋螺旋状布置叶片622产生的所有力都相互抵消,两侧均布在杆节周向的桨片537向前滚动排水,推动水陆空三栖机器人水中后退。
57.水陆复合组件b在水中转弯状态时,以左转为例,左侧螺旋推进电机510顺时针转动,右侧螺旋推进电机610顺时针转动,同时要求右侧螺旋推进电机610的实时工作功率大于左侧螺旋推进电机510的实时工作功率,使右侧的沿轴方向力大于左侧的沿轴方向力,推动水中向左转弯。
58.在水中行驶时,水陆空三栖机器人结合两侧各12道布置在杆节周向的桨片537的排水能力,实现水面全方向移动。
59.综上可知,本技术方案具有以下特点:
60.1)复合式实现多栖功能:结合多旋翼组件和水陆复合组件,可实现空、地、水面等多种模式的运动。
61.2)模块式提供更高的安全性和容错能力:模块化的螺旋杆节有更高的安全性和容错能力。即使其中一个螺旋杆节在工作中因密封失效而失去浮力,依然能保障机器人在水陆空中基本的行动能力。
62.3)复合式仿生动力装置,实现多栖功能:水陆复合组件利用仿生的概念(鸭蹼、仿蛇形的螺旋式推进),根据地面陆行、水中推进的特点,分别在不同的场景(水、陆)中可实现推进功能。
63.4)复合式动力装置,节省重量,简化控制:只需要2个电机分别负责左右两侧的转速,就能完成水面和陆面的全方向移动,使得整个机器人所需动力源少、控制简单。
64.5)复杂地形适应:多个杆节连接的设计允许水陆空三栖机器人在竖直面有高度差和角度差,使三栖机器人在保证运动性能的同时具有较好的复杂地形自适应能力。