1.本发明属于四足机器人技术领域,尤其是涉及一种四足机器人翻身方法。
背景技术:
2.随着经济的增长以及人口红利的消失,社会治安成本逐年升高。使用机器人替代人来从事一些危险区域的安防巡逻、灾区救援等任务能够有效降低人员的伤亡。四足机器人作为腿足式机器人的代表,在野外巡检、灾区救援等领域有广泛的应用场景。由于四足机器人经常处于崎岖、危险的环境,难免遇到失去平衡摔倒的情况。最严重的情况下四足机器人将出现腹部向上、背部贴地的姿态。当缺乏其他辅助翻身手段时,需要四足机器人依靠自身的关节与腿足进行翻身运动,恢复正常的工作状态。
3.四足机器人的结构包括躯干、左前腿、左后腿、右前腿和右后腿,每条腿上分别又连接有侧摆电机(用以控制腿在左右方向上的移动)、髋关节电机(用以控制腿在前后方向上的移动)、膝关节电机(用以控制小腿和大腿之间的相对转动)。
4.实际产品中,部分四足机器人背上较为平整(在背部未设置相关器件);而部分四足机器人背上设置有如激光雷达等装置,导致其背部不平整;所以需要一种能够适应于该两种不同形式的四足机器人在摔倒后的翻身方法。
技术实现要素:
5.为了克服现有技术的不足,本发明提供一种可以在各种情形下顺利实现翻身的四足机器人翻身方法。
6.本发明解决其技术问题所采用的技术方案是:一种四足机器人翻身方法,包括以下步骤:
7.检测机器人姿态,判断是否翻身;
8.将机器人的四足回缩至翻转初始状态;
9.转动机器人位于第一侧的前腿和/或后腿,直至前腿和/或后腿的膝关节接触地面,以将机器人第一侧向上支起;
10.将机器人第一侧的前腿和/或后腿展开,使得机器人的身体转动;
11.将机器人第二侧的前腿和/或后腿的膝关节转动至背部之上,使得第二侧的前腿和后腿所在平面与地面形成支撑;
12.转动机器人第二侧的前腿和/或后腿的侧摆电机,以使得第二侧的前腿和/或后腿的膝关节为支点将机器人翻转;
13.检测机器人姿态,判断是否完成翻身。
14.进一步的,所述检测机器人姿态步骤中,以机器人的身体的前后方向为x轴,左右方向为y轴,上下方向为z轴,当机器人的重力方向和z轴的夹角小于45
°
或者大于135
°
,判断需要翻身。
15.重力方向保持竖直向下,本发明中以相对机器人姿态的坐标系和重力方向作比
较,在机器人运动时,机器人姿态的坐标系时刻和重力方向发生相对改变,因此通过这样的方式去判断机器人是否翻倒,非常准确,不会误判。
16.进一步的,所述检测机器人姿态步骤中,检测机器人翻倒时的倾斜方向。
17.由于实际情况中,机器人翻倒不一定在平地上,也有可能在各种斜坡,不规则地面翻倒,加上机器人背上安装的设备,因此机器人在翻倒后,背部不一定是平整贴着地面的。因此需要根据机器人实际翻倒的姿态,选择将左侧或是右侧的腿支撑,以便更好地翻身;另一方面,将初始状态处于较高处的腿伸直,能够使机器人顶起的高度达到最大,更有利于翻身。
18.进一步的,所述将机器人第二侧的前腿和/或后腿的膝关节转动至背部之上步骤中,第二侧的前腿的大腿部分与机器人背部呈90
°
夹角,后腿的大腿部分与机器人背部呈90
°
夹角。
19.进一步的,所述转动机器人第二侧的前腿和/或后腿的侧摆电机步骤中,机器人的第一侧前腿和后腿收拢。在x轴方向上基本没有移动,更能容易地控制机器人的翻转;对机器人腿部的电机部分损伤较小,不容易使机器人腿部的电机受到损伤;翻身时降低机器人的重心,便于翻身,有些机器人的小腿较长,如果先翻身,再收腿,则小腿足底和地面磨损较大;也可以让机器人重心更接近能翻转的极限位置,降低侧摆电机的转动角度。
20.进一步的,所述转动机器人第二侧的前腿和/或后腿的侧摆电机步骤中,机器人的第一侧前腿同时向机器人腹部方向转动。
21.进一步的,所述机器人翻倒时左侧低于右侧,则机器人右侧为第一侧;或者,所述机器人翻倒时右侧低于左侧,则机器人左侧为第一侧。
22.进一步的,所述将机器人第一侧的前腿和/或后腿展开步骤后,进行第二次检测,以判断是否仍处于需要翻身状态,如果已经未处于翻转的姿态,则翻身完成。
23.进一步的,所述转动机器人位于第一侧的前腿和/或后腿,直至前腿和/或后腿的膝关节接触地面,以将机器人第一侧向上支起的步骤中,机器人倾斜的角度为α;所述机器人身体宽度为l1;将机器人第二侧的前腿和/或后腿的膝关节转动至背部之上的步骤中,支点位置至背部靠近第二侧边缘位置处垂直距离为l2;则α、l1、l2之间关系满足l2≥0.5l1
·
cosα。
24.进一步的,所述转动机器人第二侧的前腿和/或后腿的侧摆电机步骤中,至少转动至机器人左右方向连线和重力方向重合位置。
25.本发明的有益效果是,适用于四足机器人在翻倒后的自主翻身,并且可以适应不同的翻倒情况下的自主翻身;翻身过程对机器人自身损伤小,在翻身过程中,每一步骤都是稳定状态下进行,翻身更平稳。
附图说明
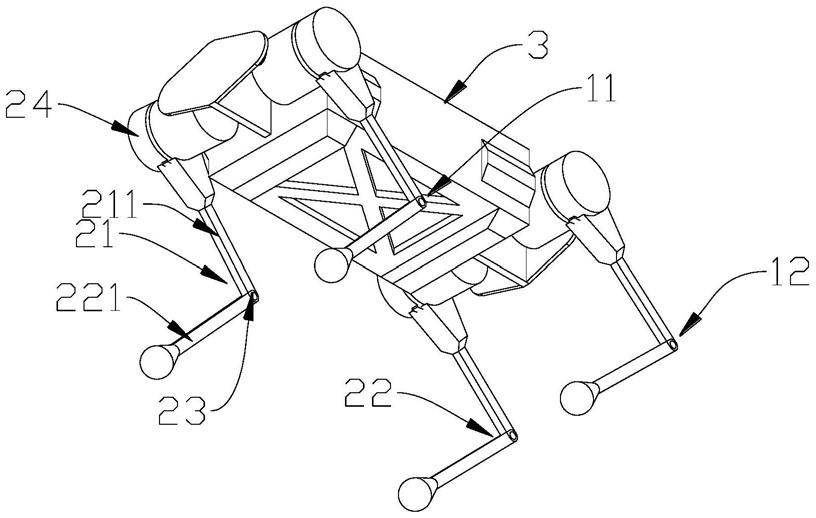
26.图1为本发明的四足机器人的立体图。
27.图2为本发明的流程框架示意图。
28.图3为本发明的动作流程立体示意图。
29.图3-1的放大示意图。
30.图3-2的放大示意图。
31.图3-3的放大示意图。
32.图3-4的放大示意图。
33.图3-5的放大示意图。
34.图3-6的放大示意图。
35.图4为本发明的动作流程主视示意图。
36.图4-1的放大示意图。
37.图4-2的放大示意图。
38.图4-3的放大示意图。
39.图4-4的放大示意图。
40.图4-5的放大示意图。
41.图4-6的放大示意图。
具体实施方式
42.为了使本技术领域的人员更好的理解本发明方案,下面将结合本发明实施例中的附图,对发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
43.以下关于前、后、左、右侧,上、下方位的方向描述均以机器人正常站立姿态为标准进行说明。
44.如图1-图4所示,一种四足机器人翻身方法,包括以下步骤:
45.检测机器人的姿态,判断其是否需要翻身;
46.具体的,以机器人的身体的前后方向为x轴,左右方向为y轴,上下方向为z轴;当z轴的正方向为竖直向上时,当机器人的重力方向和z轴的夹角小于45
°
,则判断需要翻身;当z轴的正方向为竖直向下时,当机器人的重力方向和z轴的夹角大于135
°
,则判断需要翻身。
47.若判断结果为不需要翻身,则机器人保持原有的动作程序。
48.若判断结果为需要翻身,将机器人的四足回缩至翻转初始状态,此处的翻转初始状态指的是,机器人的四个腿部的小腿向大腿收缩,且大腿向机器人身体侧方收缩,如图3-1所示。该步骤便于后续的调节和控制,使得机器人每次翻身动作都比较一致。
49.检测机器人翻倒时的倾斜方向,即向左侧倾斜还是向右侧倾斜,此时靠检测机器人的重力方向和y轴方向的夹角来判断,以机器人身体右侧为y轴正方向进行说明,当重力方向和y轴夹角小于90
°
,则机器人的左侧高于右侧,此时以机器人的左侧为第一侧;若重力方向和y轴夹角大于90
°
,则机器人的右侧高于左侧,此时以机器人的右侧为第一侧。当然在其他实施例中,y轴正方向是机器人身体左侧,则判断条件相应调整,不再赘述。
50.转动机器人位于第一侧的前腿11和后腿12,直至前腿11和后腿12的膝关节13接触地面,从而将机器人的第一侧向上支起,如图3-2所示;此时,机器人倾斜的角度为α,如图4-2所示;
51.当然也可以只转动前腿11至前腿11的膝关节接触地面,或者,只转动后腿12至后腿12的膝关节接触地面,只要能将机器人的第一侧向上支起即可。
52.将机器人第一侧的前腿11和后腿12展开,使得机器人的身体转动,如图3-3所示;
当然也可以只展开前腿11,或只展开后腿12。
53.此时可以进行第二次检测,判断机器人是否仍然处于需要翻身的状态,如果已经未处于翻转的姿态,则判断翻身完成。
54.将机器人第二侧的前腿21和后腿22的膝关节23转动至背部3之上,使得第二侧的前腿21和后腿22所在平面与地面形成支撑,如图3-4所示;当然也可以只将前腿21的膝关节转动至背部3之上,或者,至将后腿22的膝关节转动至背部3之上。
55.定义机器人身体宽度为l1,在将机器人第二侧的前腿21和后腿22的膝关节23转动至背部3之上的步骤下,机器人的第二侧与地面的支点位置至背部3靠近第二侧边缘位置处的垂直距离为l2,则α、l1、l2之间关系满足l2≥0.5l1
·
cosα,如图4-2、4-4所示。
56.更具体的,将机器人第二侧的前腿21和后腿22的膝关节23转动至背部3之上时,第二侧的前腿21的大腿部分211与机器人背部3呈90
°
夹角,后腿22的大腿部分221与机器人背部3呈90
°
夹角。当然在其他实施例中,前腿21的大腿部分211与机器人背部3也可以不呈90
°
夹角,后腿22的大腿部分221与机器人背部3也可以不呈90
°
夹角。
57.转动机器人第二侧的前腿21和后腿22的侧摆电机24,至少转动至机器人左右方向连线和重力方向重合位置,即y轴方向和重力方向重合,以使得第二侧的前腿21和后腿22的膝关节23为支点将机器人翻转,如图3-5所示。当然也可以只转动前腿21的侧摆电机,或只转动后腿22的侧摆电机。
58.在上述步骤的同时,机器人的第一侧前腿11和后腿12收拢,即第一侧前腿11的小腿向大腿收缩,大腿向机器人身体侧方收缩。与此同时,机器人的第一侧前腿11向机器人腹部4方向转动。
59.最后,检测机器人的姿态,判断是否完成翻身。翻身完成后,机器人腹部4着地,趴下待命。
60.上述具体实施方式用来解释说明本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明作出的任何修改和改变,都落入本发明的保护范围。