1.本发明涉及车辆自动控制技术领域,尤其涉及一种自动驾驶辅助过程中压线的目标车辆筛选方法。
背景技术:
2.专利申请号为cn202010086273.8的中国文件,具体公开了障碍物筛选方法、装置、电子设备及存储介质,进一步分析,该申请获取主车对应的环境感知信息,所述主车为待处理的自动驾驶车辆,环境感知信息中包括感知区域内的障碍物信息;确定出主车在未来预定时长内的行驶轨迹;从感知区域内的障碍物中筛选出位于行驶轨迹内的障碍物,将筛选出的障碍物作为所需的目标障碍物,可提升行车安全等,此类技术通过传感器检测前方车辆与本车间纵向距离、横向距离信息,通过计算一段时间内,目标车辆位置的变化判断目标车是否跨越车道线切入或切出自车道,且现有技术未将前方车辆压线行驶过程中,是否对本车自适应巡航产生干扰做出判断;现有技术对目标车辆压线过程行驶时,会筛选为感兴趣目标,造成自适应巡航过程出现误刹车现象;现有技术对压线的目标车辆筛选会存在一定的误差,存在目标车辆很小部分在自车道内时,并且与本车无重叠风险时,误将该目标筛选为感兴趣目标的几率,因此,我们提出了一种自动驾驶辅助过程中压线的目标车辆筛选方法。
技术实现要素:
3.本发明提出的一种自动驾驶辅助过程中压线的目标车辆筛选方法,解决了现有的目标车辆筛选存在的易受前方车辆干扰,造成自适应巡航过程出现误刹车现象,筛选精确度低,存在误差,导致安全性降低的问题。
4.为了实现上述目的,本发明采用了如下技术方案:
5.一种自动驾驶辅助过程中压线的目标车辆筛选方法,包括如下步骤:
6.s1、获取目标信息:通过传感器获取前方车辆的信息;
7.s2、获取车道信息:通过传感器输出车导线以三次多项式方式计算车道信息;
8.s3、计算车辆位置:对前方车辆的所处位置进行计算;
9.s4、计算车辆比例:通过车辆的横向距离差值计算车辆跨入车道部分的比例;
10.s5、计算车辆重叠风险:通过对比自车到左右侧车道线的距离,对车辆重叠风险进行计算。
11.优选的,所述步骤s1中所涉及的获取目标信息,其通过前视摄像头、前毫米波雷达的传感器获取前方车辆的信息,其中包括车长obs_length、车宽obs_width、车高obs_high、纵向相对距离obs_dx、横向相对距离obs_dy、纵向相对速度obs_dxv、横向相对速度obs_dyv以及前方车辆的方向角obs_yaw_angle的系数。
12.优选的,所述步骤s2中所涉及的获取车道信息,其通过传感器输出车导线以三次多项式方式对车道信息进行计算,其中三次多项式方式如下所示:
13.y=c0+c1x+c2x2+c3x314.其中自车道左侧车道线系数为c0_l、c1_l、c2_l、c3_l,右侧车道线系数为c0_r、c1_r、c2_r、c3_r。
15.优选的,所述步骤s3中所涉及的计算车辆位置,其在与计算前方车辆dx处本车所在车道左车道线上的y坐标为dy_l,对应右侧车道线上y坐标为dy_r。
16.优选的,所述步骤s4中所涉及的计算车辆比例,其通过横向相对距离obs_dy与dy_l和dy_r的差值计算目标车辆跨入自车道部分的比例ratio。
17.优选的,所述步骤s4中所涉及的计算车辆比例,若横向相对距离obs_dy》0,表示目标车辆处于自车的右侧;
18.若obs_dy《0则表示目标车辆处于自车左侧。
19.优选的,所述步骤s4中所涉及的计算车辆比例,若横向相对距离obs_dy》0,则:
20.若obs_dy-dy_r》0.5*obs_width,表示目标车辆处于右侧车道,ratio=0;
21.若obs_dy-dy_r《-0.5*obs_width,表示目标车辆处于自车道内,ratio=1;
22.若obs_dy-dy_r》-0.5*obs_width且obs_dy-dy_r《0.5*obs_width,则
[0023][0024]
优选的,所述步骤s4中所涉及的计算车辆比例,若横向相对距离obs_dy《0,则:
[0025]
若obs_dy-dy_l》0.5*obs_width,表示为目标车辆处于自车道内,ratio=1;
[0026]
若obs_dy-dy_l《-0.5*obs_width,表示为目标车辆处于左侧车道内,ratio=1;
[0027]
若obs_dy-dy_l》-0.5*obs_width且
[0028]
obs_dy-dy_l《0.5*obs_width,则
[0029][0030]
优选的,所述步骤s5中所涉及的计算车辆重叠风险,其自车到左侧车道线距离为c0_l、自车到右侧车道线距离为c0_r,通过|c0_l|与|c0_r|对自车的位置进行计算,从而计算目标车辆与自车是否有重叠风险。
[0031]
优选的,所述步骤s5中所涉及的计算车辆重叠风险,若|c0_l|》|c0_r|,则表示为自车在本车道内靠右侧行驶,此时计算出自车与目标车辆是否存在重叠,若存在重叠部分,则目标车辆需要被筛选为感兴趣目标。
[0032]
本发明的有益效果为:
[0033]
1、通过对前方的目标车辆在本车道内的比例进行实时计算,筛选出感兴趣目标,从而有效避免前方车辆切入和切出时压线过程对本车控制的影响,提高控制的稳定性和安全性。
[0034]
2、通过对目标车辆与自车重叠风险进行计算,从而对自适应巡航过程中造成的误筛选中前方压线目标为感兴趣目标造成的刹车现象进行优化,避免无刹车现象的产生,提高自适应巡航的精确度,优化自适应巡航的稳定性和舒适性。
[0035]
综上所述,该目标车辆筛选方法通过实时计算有效提高筛选的精确度,保证车辆的安全性,且车辆控制的稳定性和舒适性高。
附图说明
[0036]
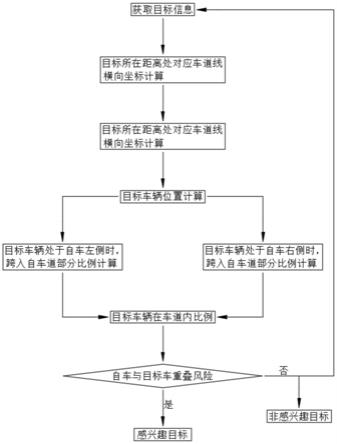
图1为本发明所述的自动驾驶辅助过程中压线的目标车辆筛选方法的流程图。
具体实施方式
[0037]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0038]
实施例1
[0039]
参照图1,一种自动驾驶辅助过程中压线的目标车辆筛选方法,包括如下步骤:
[0040]
s1、获取目标信息:通过传感器获取前方车辆的信息;
[0041]
s2、获取车道信息:通过传感器输出车导线以三次多项式方式计算车道信息;
[0042]
s3、计算车辆位置:对前方车辆的所处位置进行计算;
[0043]
s4、计算车辆比例:通过车辆的横向距离差值计算车辆跨入车道部分的比例;
[0044]
s5、计算车辆重叠风险:通过对比自车到左右侧车道线的距离,对车辆重叠风险进行计算。
[0045]
实施例2
[0046]
参照图1,一种自动驾驶辅助过程中压线的目标车辆筛选方法,包括如下步骤:
[0047]
s1、获取目标信息,其通过前视摄像头、前毫米波雷达的传感器获取前方车辆的信息,其中包括车长obs_length、车宽obs_width、车高obs_high、纵向相对距离obs_dx、横向相对距离obs_dy、纵向相对速度obs_dxv、横向相对速度obs_dyv以及前方车辆的方向角obs_yaw_angle的系数;获取车道信息,其通过传感器输出车导线以三次多项式方式对车道信息进行计算,其中三次多项式方式如下所示:
[0048]
y=c0+c1x+c2x2+c3x3[0049]
其中自车道左侧车道线系数为c0_l、c1_l、c2_l、c3_l,右侧车道线系数为c0_r、c1_r、c2_r、c3_r;
[0050]
s2、计算车辆位置,其在与计算前方车辆dx处本车所在车道左车道线上的y坐标为dy_l,对应右侧车道线上y坐标为dy_r。
[0051]
s3、计算车辆比例,其通过横向相对距离obs_dy与dy_l和dy_r的差值计算目标车辆跨入自车道部分的比例ratio;
[0052]
若横向相对距离obs_dy》0,表示目标车辆处于自车的右侧;
[0053]
若obs_dy《0则表示目标车辆处于自车左侧;
[0054]
s3.1、若横向相对距离obs_dy》0,则:
[0055]
若obs_dy-dy_r》0.5*obs_width,表示目标车辆处于右侧车道,ratio=0;
[0056]
若obs_dy-dy_r《-0.5*obs_width,表示目标车辆处于自车道内,ratio=1;
[0057]
若obs_dy-dy_r》-0.5*obs_width且obs_dy-dy_r《0.5*obs_width,则
[0058][0059]
s3.2、若横向相对距离obs_dy《0,则:
[0060]
若obs_dy-dy_l》0.5*obs_width,表示为目标车辆处于自车道内,ratio=1;
[0061]
若obs_dy-dy_l《-0.5*obs_width,表示为目标车辆处于左侧车道内,ratio=1;
[0062]
若obs_dy-dy_l》-0.5*obs_width且
[0063]
obs_dy-dy_l《0.5*obs_width,则
[0064][0065]
s4、计算车辆重叠风险,其自车到左侧车道线距离为c0_l、自车到右侧车道线距离为c0_r,通过|c0_l|与|c0_r|对自车的位置进行计算,从而计算目标车辆与自车是否有重叠风险,若|c0_l|》|c0_r|,则表示为自车在本车道内靠右侧行驶,此时计算出自车与目标车辆是否存在重叠,若存在重叠部分,则目标车辆需要被筛选为感兴趣目标。
[0066]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。