1.本发明属于接触网检测技术领域,尤其涉及一种接触悬挂吊弦区域异物检测方法及系统。
背景技术:
2.接触网是在电气化铁道中,沿钢轨上空“之”字形架设的,供受电弓取流的高压输电线。接触网是铁路电气化工程的主构架,是沿铁路线上空架设的向电力机车供电的特殊形式的输电线路。
3.接触网主要由接触悬挂、支持装置、定位装置、支柱与基础几部分组成,其中,接触悬挂通过支持装置架设在支柱上,其功用是将从牵引变电所获得的电能输送给电力机车,接触悬挂包括接触线、吊弦、承力索以及连接零件和绝缘子,而接触网吊弦是输送电能的关键部件,一旦接触网吊弦出现故障将会产生巨大的影响,严重时可能引发弓网事故,从而给列车运行带来安全隐患。
4.目前,检测接触网吊弦上是否包含有异物的技术手段,主要是采用基于深度学习的方法,利用特征图像的识别完成对吊弦图像中的异物进行识别,例如,现有技术中,公开号为“cn112102302a”,公开时间为2020年12月18日,名称为“图像识别方法及装置、电子设备和存储介质”的中国发明申请文献,其公开的技术方案中,通过神经网络对图像进行分割,得到至少一个第一掩码图,然后根据该第一掩码图确定吊弦上是否挂在有异物。
5.但是,现有技术的这种方法,其吊弦异物检测准确度受限于是否具有丰富的正负检测样本对识别模型和算法进行训练,然而实际的现场环境中,吊弦上的异物形态各异,很难有足够的正负检测样本用于对模型和算法进行训练,算法上不够精确就难以保证对吊弦异物的检测准确度。
技术实现要素:
6.为了克服上述现有技术中存在的问题和不足,本发明旨在于提供一种基于区域轮廓异常检测方法、能够提高对吊弦区域异物检测准确度的异物检测方法及系统。
7.一种接触悬挂吊弦区域异物检测方法,包括以下步骤:吊弦区域图像获取步骤,通过图像采集设备获取包括承力索线、接触线以及连接承力索线和接触线之间的吊弦本体的接触悬挂吊弦区域图像;边缘检测步骤,对所述吊弦区域图像获取步骤中获取的吊弦区域图像进行边缘检测,定位接触悬挂吊弦区域图像中的承力索线、接触线和吊弦本体所在区域,得到承力索线区域、接触线区域和吊弦本体区域;进一步的,所述边缘检测步骤中,对所述吊弦区域图像获取步骤中获取的吊弦区域图像进行边缘检测,具体的,包括以下步骤:步骤1,根据先验阈值在所述吊弦区域图像上设置包括承力索线、接触线以及吊弦本体的感兴趣区域;
步骤2,对步骤1中得到的感兴趣区域进行边缘检测,得到承力索线、接触线以及吊弦本体在自由曲线上的边缘点集合;步骤3,将步骤2中得到的承力索线、接触线以及吊弦本体所在的自由曲线上的边缘点集进行曲线拟合,得到对应承力索线、接触线以及吊弦本体的封闭曲线段,封闭曲线段内即为对应承力索线、接触线以及吊弦本体的接触悬挂吊弦区域图像。
8.轮廓线检测步骤,在接触悬挂吊弦区域图像中对所述边缘检测步骤中得到的承力索线区域、接触线区域和吊弦本体区域进行膨胀处理,然后对膨胀处理后的区域进行承力索线、接触线和吊弦本体的轮廓线检测;具体的,所述膨胀处理,是将所述边缘检测步骤中得到的、接触悬挂吊弦区域图像中的承力索线区域、接触线区域和吊弦本体区域进行二值化处理,然后根据灰度阈值获取承力索线、接触线和吊弦本体的像素点,将像素点进行关于原点的反射得到反射合集,完成膨胀处理。
9.轮廓线细化处理步骤,将轮廓线检测步骤中检测到的轮廓线以逐像素点进行细化处理,使在接触悬挂吊弦区域图像中检测出的轮廓线的每个像素点的8邻域内,有且仅有两个其他轮廓点,得到细化后的承力索线轮廓线、接触线轮廓线和吊弦本体轮廓线;所述轮廓线细化处理步骤中,将轮廓线检测步骤中检测到的轮廓线,根据设定的色域、锐度、灰度值阈值,逐像素点进行补偿处理,任何对每个像素点的8邻域内的其他像素点进行合并处理。
10.曲率特征提取步骤,提取所述轮廓线细化处理步骤中得到的承力索线轮廓线、接触线轮廓线和吊弦本体轮廓线的曲率特征,根据曲率特征的提取结果定位出承力索线、接触线和吊弦本体的轮廓线上,连续处异常的凹凸轮廓,并判定为异物所在区域。
11.优选的,所述曲率特征提取步骤中,是采用线性回归算法对承力索线轮廓线、接触线轮廓线和吊弦本体轮廓线的曲率特征进行计算提取特征的。
12.具体的,采用线性回归算法对承力索线轮廓线、接触线轮廓线或吊弦本体轮廓线上的每个点(xi,yi)与相邻的前pre个点以及之后共next个点组成的线段的弯曲程度进行计算,则,线段由(pre+next+1)个点组成,线段的坐标视为沿着承力索线轮廓线、接触线轮廓线或吊弦本体轮廓线的点(x
i-pre
,y
i-pre
)到点(x
i+next
,y
i+next
),将点(x
i-pre
,y
i-pre
)到点(x
i+next
,y
i+next
)拟合为直线,并将拟合结果的决定系数记为r,则提取特征描述符cur=1-r作为该线段的曲率特征,特征描述符cur的值越大,曲率特征越明显,反之特征描述符cur的值越小,曲率特征越不明显。
13.对应上述方法,本发明还提供了一种接触悬挂吊弦区域异物检测装置,包括图像采集设备、边缘检测单元、轮廓线检测单元、轮廓线细化单元和异物检测单元;所述图像采集设备,用于获取包括承力索线、接触线以及连接承力索线和接触线之间的吊弦本体的接触悬挂吊弦区域图像,并将接触悬挂吊弦区域图像发送至所述边缘检测单元进行边缘检测;所述边缘检测单元,用于对所述图像采集设备采集到的吊弦区域图像进行边缘检测,通过内嵌的机器学习模型自动定位接触悬挂吊弦区域图像中的承力索线、接触线和吊弦本体所在区域,并将得到承力索线区域、接触线区域和吊弦本体区域发送至所述轮廓线检测单元;
所述轮廓线检测单元,用于对承力索线区域、接触线区域和吊弦本体区域做膨胀处理,然后对膨胀处理后的区域进行承力索线、接触线和吊弦本体的轮廓线检测识别,并将识别出的承力索线、接触线和吊弦本体的轮廓线发送至所述轮廓线细化单元;所述轮廓线细化单元,用于对轮承力索线、接触线和吊弦本体的轮廓线进行细化处理,将承力索线、接触线和吊弦本体的轮廓线逐像素处理为每个像素点的8邻域内有且仅有两个其他轮廓点,并将处理结果发送至所述异物检测单元;所述异物检测单元,用于对所述轮廓线细化单元处理的轮廓线进行曲率特征提取,并根据曲率特征结果定位出承力索线连续处异常的凹凸轮廓作为异物区域。
14.具体的,所述图像采集设备包括采集装置、接触网图像几何处理装置、电源装置、安装架和图综合处理装置,所述采集装置安装在安装架朝向接触网进行图像采集,采集装置将采集到的接触网图像发送至所述接触网图像几何处理装置中进行图像的几何处理,经过几何处理后的图像发送至所述图综合处理装置进行接触悬挂吊弦区域的提取。
15.更为优选地,所述图综合处理装置进行接触悬挂吊弦区域的提取,是采用经过训练的目标检测模型、从经过几何处理后的图像中提取以接触悬挂吊弦区域为目标部件的目标区域,然后对目标区域进行图像分割得到目标部件的零件图像,并通过训练好的分类模型对所述零件图像进行分类,提取出承力索线、接触线以及吊弦本体的区域图像,所述目标检测模型、分类模型,可以采用现有的机器学习模型、通过已经经过识别确认的接触悬挂吊弦区域图像进行训练。
16.此外,本技术还提供了一种电子设备,包括处理器和存储器,所述处理器与存储器通讯相连,所述存储器用于存储计算机程序,所述处理器用于执行所述存储器中存储的计算机程序,以使得所述电子设备执行本发明的这种接触悬挂吊弦区域异物检测方法。
17.有益效果:与现有技术方案相比,本发明所提供的这种接触悬挂吊弦区域异物检测方法根据吊弦异物的曲率特征进行异物检测,充分利用了吊弦区域目标的多为直线的背景特征,避免了深度学习方法由于异物样本缺乏导致的异物检测准确度低问题。
18.进一步的,本发明采用线性拟合的方法计算类曲率特征,可根据识别精度和计算时限的需要选择线性拟合窗口内的轮廓点数,相比传统的曲率公式计算曲率值计算方式简捷、灵活性高,适应接触网悬挂零部件缺陷在线识别的需求。
附图说明
19.本发明的前述和下文具体描述在结合以下附图阅读时变得更清楚,附图中:图1为本发明一种优选方案的流程示意图;图2为本发明吊弦区域图像示意图;图3为本发明吊弦区域轮廓线示意图;图4为本发明吊弦区域轮廓线膨胀处理后示意图;图5为本发明吊弦区域异物示意图。
具体实施方式
20.下面通过几个具体的实施例来进一步说明实现本发明目的技术方案,需要说明的
是,本发明要求保护的技术方案包括但不限于以下实施例。
21.实施例1本实施例公开了一种接触悬挂吊弦区域异物检测方法,包括吊弦区域图像获取步骤、边缘检测步骤、轮廓线检测步骤、轮廓线细化处理步骤和曲率特征提取步骤,根据吊弦异物的曲率特征进行异物检测,充分利用了吊弦区域目标的多为直线的背景特征,避免了深度学习方法由于异物样本缺乏导致的异物检测准确度低问题。
22.所述吊弦区域图像获取步骤,如图2,通过图像采集设备获取包括承力索线、接触线以及连接承力索线和接触线之间的吊弦本体的接触悬挂吊弦区域图像。
23.所述边缘检测步骤,对所述吊弦区域图像获取步骤中获取的吊弦区域图像进行边缘检测,定位接触悬挂吊弦区域图像中的承力索线、接触线和吊弦本体所在区域,得到承力索线区域、接触线区域和吊弦本体区域。
24.所述轮廓线细化处理步骤,如图3,将轮廓线检测步骤中检测到的轮廓线以逐像素点进行细化处理,使在接触悬挂吊弦区域图像中检测出的轮廓线的每个像素点的8邻域内,有且仅有两个其他轮廓点,得到细化后的承力索线轮廓线、接触线轮廓线和吊弦本体轮廓线;轮廓线检测步骤,如图4,在接触悬挂吊弦区域图像中对所述边缘检测步骤中得到的承力索线区域、接触线区域和吊弦本体区域进行膨胀处理,然后对膨胀处理后的区域进行承力索线、接触线和吊弦本体的轮廓线检测;曲率特征提取步骤,如图5,提取所述轮廓线细化处理步骤中得到的承力索线轮廓线、接触线轮廓线和吊弦本体轮廓线的曲率特征,根据曲率特征的提取结果定位出承力索线、接触线和吊弦本体的轮廓线上,连续处异常的凹凸轮廓,并判定为异物所在区域。
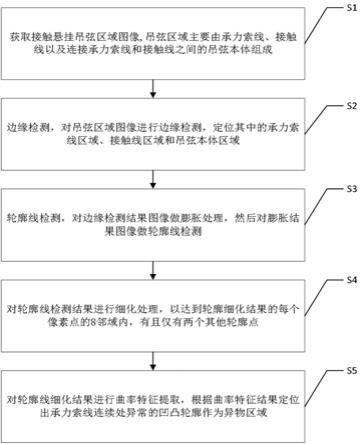
25.更为具体的,如图1,上述的接触悬挂吊弦区域异物检测方法:步骤s1,如图2所示,获取接触悬挂吊弦区域图像,吊弦区域主要由承力索线、接触线以及连接承力索线和接触线之间的吊弦本体组成。
26.步骤s2,对接触网吊弦区域图像进行二值化,并通过任意算子进行边缘检测,对吊弦区域图像进行边缘检测,定位其中的承力索线区域、接触线区域和吊弦本体区域,优选地,二值化采用基于wall算法的自适应阈值方法,具体为按行遍历图像,计算一个移动的平均值,如果当前像素低于这个平均值,则设置为黑色,否则设置为白色,边缘检测结果如图3所示。
27.步骤s3,轮廓线检测,如图4所示,对步骤s2的边缘检测结果图像做膨胀处理,然后对膨胀结果图像做轮廓线检测。
28.步骤s4,膨胀后的轮廓线检测结果某些像素点可能出现临近点数量》2的情况,这样会影响后续步骤按照顺序提取轮廓像素点进行线性拟合,因此,需要对轮廓线检测结果进行细化处理,以达到轮廓细化结果的每个像素点的8邻域内,有且仅有两个其他轮廓点;细化后的轮廓,保证了某像素点的8邻域内,有且仅有两个其他轮廓点(一个是遍历的上一个像素点,一个是遍历的下一个像素点),从任意一个轮廓点(xi,yi)出发, 沿着其8邻域内且未遍历过的像素点前进,直至回到起始点。除初始点外,其他点可供选择的邻域像素有且仅有一个,从而保证了能够正确地从初始点出发,遍历所有点后回到初始点。
29.步骤s5,如图4所示,对轮廓线细化结果进行曲率特征提取,根据曲率特征结果定
位出承力索线连续处异常的凹凸轮廓作为异物区域。
30.更为优选地,所述边缘检测步骤中,对所述吊弦区域图像获取步骤中获取的吊弦区域图像进行边缘检测,具体的,包括以下步骤:步骤1,根据先验阈值在所述吊弦区域图像上设置包括承力索线、接触线以及吊弦本体的感兴趣区域;步骤2,对步骤1中得到的感兴趣区域进行边缘检测,得到承力索线、接触线以及吊弦本体在自由曲线上的边缘点集合;步骤3,将步骤2中得到的承力索线、接触线以及吊弦本体所在的自由曲线上的边缘点集进行曲线拟合,得到对应承力索线、接触线以及吊弦本体的封闭曲线段,封闭曲线段内即为对应承力索线、接触线以及吊弦本体的接触悬挂吊弦区域图像。
31.所述轮廓线检测步骤中的膨胀处理,是将所述边缘检测步骤中得到的、接触悬挂吊弦区域图像中的承力索线区域、接触线区域和吊弦本体区域进行二值化处理,然后根据灰度阈值获取承力索线、接触线和吊弦本体的像素点,将像素点进行关于原点的反射得到反射合集,完成膨胀处理。
32.所述轮廓线细化处理步骤中,将轮廓线检测步骤中检测到的轮廓线,根据设定的色域、锐度、灰度值阈值,逐像素点进行补偿处理,任何对每个像素点的8邻域内的其他像素点进行合并处理。
33.所述曲率特征提取步骤中,是采用线性回归算法对承力索线轮廓线、接触线轮廓线和吊弦本体轮廓线的曲率特征进行计算提取特征的,具体的,采用线性回归算法对承力索线轮廓线、接触线轮廓线或吊弦本体轮廓线上的每个点(xi,yi)与相邻的前pre个点以及之后共next个点组成的线段的弯曲程度进行计算,则,线段由(pre+next+1)个点组成,线段的坐标视为沿着承力索线轮廓线、接触线轮廓线或吊弦本体轮廓线的点(x
i-pre
,y
i-pre
)到点(x
i+next
,y
i+next
),将点(x
i-pre
,y
i-pre
)到点(x
i+next
,y
i+next
)拟合为直线,并将拟合结果的决定系数记为r,则提取特征描述符cur=1-r作为该线段的曲率特征,特征描述符cur的值越大,曲率特征越明显,反之特征描述符cur的值越小,曲率特征越不明显。
34.此外,本实施例对应还提供了一种电子设备,包括处理器和存储器,所述处理器与存储器通讯相连,所述存储器用于存储计算机程序,所述处理器用于执行所述存储器中存储的计算机程序,以使得所述电子设备执行本实施例的这种接触悬挂吊弦区域异物检测方法。
35.实施例2对应上述实施例1的方法,本实施例还提供了一种接触悬挂吊弦区域异物检测装置,包括图像采集设备、边缘检测单元、轮廓线检测单元、轮廓线细化单元和异物检测单元。
36.所述图像采集设备,用于获取包括承力索线、接触线以及连接承力索线和接触线之间的吊弦本体的接触悬挂吊弦区域图像,并将接触悬挂吊弦区域图像发送至所述边缘检测单元进行边缘检测。
37.具体的,所述图像采集设备包括采集装置、接触网图像几何处理装置、电源装置、安装架和图综合处理装置,所述采集装置安装在安装架朝向接触网进行图像采集,采集装置将采集到的接触网图像发送至所述接触网图像几何处理装置中进行图像的几何处理,经过几何处理后的图像发送至所述图综合处理装置进行接触悬挂吊弦区域的提取。
38.更为优选地,所述图综合处理装置进行接触悬挂吊弦区域的提取,是采用经过训练的目标检测模型、从经过几何处理后的图像中提取以接触悬挂吊弦区域为目标部件的目标区域,然后对目标区域进行图像分割得到目标部件的零件图像,并通过训练好的分类模型对所述零件图像进行分类,提取出承力索线、接触线以及吊弦本体的区域图像,所述目标检测模型、分类模型,可以采用现有的机器学习模型、通过已经经过识别确认的接触悬挂吊弦区域图像进行训练。
39.所述边缘检测单元,用于对所述图像采集设备采集到的吊弦区域图像进行边缘检测,通过内嵌的机器学习模型自动定位接触悬挂吊弦区域图像中的承力索线、接触线和吊弦本体所在区域,并将得到承力索线区域、接触线区域和吊弦本体区域发送至所述轮廓线检测单元。
40.所述轮廓线检测单元,用于对承力索线区域、接触线区域和吊弦本体区域做膨胀处理,然后对膨胀处理后的区域进行承力索线、接触线和吊弦本体的轮廓线检测识别,并将识别出的承力索线、接触线和吊弦本体的轮廓线发送至所述轮廓线细化单元。
41.所述轮廓线细化单元,用于对轮承力索线、接触线和吊弦本体的轮廓线进行细化处理,将承力索线、接触线和吊弦本体的轮廓线逐像素处理为每个像素点的8邻域内有且仅有两个其他轮廓点,并将处理结果发送至所述异物检测单元。
42.所述异物检测单元,用于对所述轮廓线细化单元处理的轮廓线进行曲率特征提取,并根据曲率特征结果定位出承力索线连续处异常的凹凸轮廓作为异物区域。