1.本实用新型涉及电路控制技术领域,特别是涉及一种交直流铁路信号转辙机互控换向动作电路。
背景技术:
2.转辙机是指用以可靠地转换道岔位置,改变道岔开通方向,锁闭道岔尖轨,反映道岔位置的重要的信号基础设备,它可以很好地保证行车安全,提高运输效率,改善行车人员的劳动强度。
3.对于转辙机,为了保证其可靠性,需要对其进行跑合试验以及寿命试验。现有转辙机的跑合试验(即磨合试验)以及寿命试验,均是通过专用控制系统进行往复动作的控制,而控制系统多采用机械式继电器或者电气元件,因此,控制系统长期使用后,会因为继电器或电气元件老化而造成试验终止,需要更换后才能进行,并且控制系统进行老化零件的更换,也会产生一定的维护成本。
4.需要说明的是,转辙机跑合试验,主要是对转辙机零件进行磨合,确保转辙机出厂即达到最佳使用状态。寿命试验主要是验证设备零部件在规定寿命其内的使用状态或验证零部件的寿命极限。
5.此外,在户外现场进行大电流的交流转辙机和直流转辙机试验时,如果出现继电器或电气元件老化问题,会因为无法找到合适的控制电气元件进行更换而造成试验无法继续进行。
技术实现要素:
6.本实用新型的目的是针对现有技术存在的技术缺陷,提供一种交直流铁路信号转辙机互控换向动作电路。
7.为此,本实用新型提供了一种交直流铁路信号转辙机互控换向动作电路,包括第一转辙机和第二转辙机;
8.第一转辙机为直流转辙机,第二转辙机为三相交流转辙机;
9.其中,第一转辙机,包括转辙机直流电机和第一转辙机自身接点组;
10.转辙机直流电机和第一转辙机自身接点组相导电连接;
11.其中,第二转辙机,包括转辙机交流电机和第二转辙机自身接点组;
12.转辙机交流电机和第二转辙机自身接点组相导电连接;
13.其中,转辙机直流电机,与直流电源相导电连接;
14.转辙机交流电机,与交流电源相导电连接;
15.其中,直流电源的供电输出线路上,设置有第二控制开关;
16.直流电源,通过第二控制开关与第一转辙机自身接点组相导电连接;
17.其中,交流电源的供电输出线路上,设置有第一控制开关;
18.交流电源,通过第一控制开关与第二转辙机自身接点组相导电连接;
19.其中,第一转辙机自身接点组和第二转辙机自身接点组,均包括四个纵排的接点,且每个纵排的接点包括三对接点开关;
20.第一转辙机自身接点组和第二转辙机自身接点组,两者通过导线相导电连接。
21.优选地,关于第一转辙机自身接点组和第二转辙机自身接点组,两者通过导线相导电连接,具体的连接结构如下:
22.其中,对于第一转辙机自身接点组,其第一纵排第一对接点的接点15,与第二转辙机自身接点组中第二纵排第一对接点的接点25,通过导线相导电连接;
23.对于第一转辙机自身接点组,其第二纵排第一对接点的接点25,与第二转辙机自身接点组中第四纵排第一对接点的接点45,通过导线相导电连接;
24.对于第一转辙机自身接点组,其第三纵排第一对接点的接点35,与第二转辙机自身接点组中第一纵排第一对接点的接点15,通过导线相导电连接;
25.对于第一转辙机自身接点组,其第四纵排第一对接点的接点45,与第二转辙机自身接点组中第三纵排第一对接点的接点35,通过导线相导电连接;
26.其中,对于第一转辙机自身接点组,其第二纵排第二对接点的接点23,与第二转辙机自身接点组中第四纵排第二对接点的接点43,通过导线相导电连接;
27.对于第一转辙机自身接点组,其第三纵排第二对接点的接点33,与第二转辙机自身接点组中第一纵排第二对接点的接点13,通过导线相导电连接。
28.优选地,关于转辙机直流电机和第一转辙机自身接点组相导电连接,具体的连接结构如下:
29.转辙机直流电机的直流接线端d2,与第一转辙机自身接点组中第一纵排第一对接点的接点16,通过导线相导电连接;
30.转辙机直流电机的直流接线端d1,与第一转辙机自身接点组中第一纵排第一对接点的接点46,通过导线相导电连接。
31.优选地,关于转辙机交流电机和第二转辙机自身接点组相导电连接,具体的连接结构如下:
32.转辙机交流电机中的交流接线端v1,与第二转辙机自身接点组中第一纵排第二对接点的接点14和第四纵排第一对接点的接点46,通过导线相导电连接;
33.转辙机交流电机中的交流接线端w1,与第二转辙机自身接点组中第一纵排第一对接点的接点16和第四纵排第二对接点的接点44,通过导线相导电连接。
34.优选地,交流电源的c相端、b相端和a相端,分别与第一控制开关的动触点1、动触点2和动触点3相连接;
35.其中,对于第一控制开关,其包括静触点4、静触点5和静触点6,静触点4、静触点5和静触点6分别与动触点1、动触点2和动触点3对应设置;
36.其中,第一控制开关的静触点4,分别通过导线与第一转辙机自身接点组中第二纵排第二对接点的接点24和第三纵排第二对接点的接点34相导电连接;
37.第一控制开关的静触点5,分别通过导线与第一转辙机自身接点组中第二纵排第一对接点的接点26和第三纵排第一对接点的接点36相导电连接;
38.第一控制开关的静触点6,通过导线,与转辙机交流电机中的交流接线端u1相导电连接;
39.其中,直流电源的电压输出端dz和电压输出端df,分别与第二控制开关的动触点1和动触点2相连接;
40.对于第二控制开关,其包括静触点3和静触点4,静触点3和静触点4分别与动触点1和动触点2对应设置;
41.其中,第二控制开关的静触点3,分别通过导线与第二转辙机自身接点组中第二纵排第一对接点的接点26和第三纵排第一对接点的接点36相导电连接;
42.第二控制开关的静触点4,通过导线,与转辙机直流电机501中的直流接线端d4相导电连接。
43.由以上本实用新型提供的技术方案可见,与现有技术相比较,本实用新型提供了一种交直流铁路信号转辙机互控换向动作电路,其结构设计科学,该动作电路不需要传统的转辙机专用控制系统,通过对一台交流转辙机和一台直流转辙机的自身接点组进行通断控制(即接通或者断开控制),结合交流转辙机和直流转辙机自身接点组具有的转辙机动作逻辑控制功能,即可实现控制转辙机进行连续往返动作或者单次动作(即单次拉入或者单次伸出动作),从而满足两台不同电源制式的转辙机的跑合试验(即磨合试验)以及寿命试验需求,具有重大的实践意义。
44.对于本实用新型提供的交直流铁路信号转辙机互控换向动作电路,由于该动作电路对转辙机动作的控制逻辑是采用转辙机自身接点组来实现,因此可以承受较大电流的冲击,保证具有较长的使用寿命。
附图说明
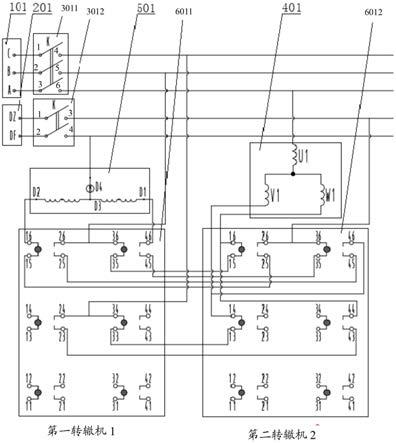
45.图1为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路的实施例的结构示意图,在实施例中,采用一个交流电源和一个直流电源,进行两台不同电源制式的转辙机的跑合试验(即磨合试验)或寿命试验图2a为对于本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,其中第一转辙机或者第二转辙机处于拉入位状态时,对应的第一转辙机自身接点组或第二转辙机自身接点组中相应纵排接点的接通状态示意图;
46.图2b为对于本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,其中第一转辙机或者第二转辙机处于转换状态时,对应的第一转辙机自身接点组或第二转辙机自身接点组中相应纵排接点的接通状态示意图;
47.图2c为对于本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,其中第一转辙机或者第二转辙机处于伸出位状态时,对应的第一转辙机自身接点组或第二转辙机自身接点组中相应纵排接点的接通状态示意图;
48.图3为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路中,对于第一转辙机自身接点组或第二转辙机自身接点组,转辙机自身接点组的结构示意图;
49.图4a为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图一;
50.图4b为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图二;
51.图4c为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图三;
52.图4d为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图四;
53.图4e为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图五;
54.图4f为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图六;
55.图4g为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图七;
56.图4h为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图八;
57.图4i为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图九;
58.图4j为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图十;
59.图4k为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图十一;
60.图4l为本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,在实施例一中,两台直流转辙机的互控动作示意图十二;
61.图中,101、交流电源,102、直流电源;
62.3011、第一主控制开关,3012、第二主控制开关;
63.401、转辙机交流电机,501、转辙机直流电机;
64.6011、第一转辙机自身接点组,6012、第二转辙机自身接点组。
具体实施方式
65.为使本实用新型实现的技术手段更容易理解,下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关申请,而非对该申请的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分。
66.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
67.参见图1至图4l所示,本实用新型提供了一种交直流铁路信号转辙机互控换向动作电路,用于铁路信号转辙机的电路控制,具体包括第一转辙机1和第二转辙机2;
68.第一转辙机1为直流转辙机,第二转辙机2为三相交流转辙机;
69.其中,第一转辙机1,包括转辙机直流电机501和第一转辙机自身接点组6011;
70.转辙机直流电机501和第一转辙机自身接点组6011相导电连接;
71.其中,第二转辙机2,包括转辙机交流电机401和第二转辙机自身接点组6012;
72.转辙机交流电机401和第二转辙机自身接点组6012相导电连接;
73.其中,转辙机直流电机501,与直流电源201相导电连接;
74.转辙机交流电机401,与交流电源101相导电连接;
75.其中,直流电源201的供电输出线路上,设置有第二控制开关3012;
76.直流电源201,通过第二控制开关3012与第一转辙机自身接点组6011相导电连接;
77.其中,交流电源101的供电输出线路上,设置有第一控制开关3011;
78.交流电源101,通过第一控制开关3011与第二转辙机自身接点组6012相导电连接;
79.其中,第一转辙机自身接点组6011和第二转辙机自身接点组6012,均包括四个纵排的接点,且每个纵排的接点包括三对接点开关(每对接点开关,包括两个接点);
80.第一转辙机自身接点组6011和第二转辙机自身接点组6012,两者通过导线相导电连接。
81.对于本实用新型,需要说明的是,参见图2a至图2c所示,第一转辙机自身接点组6011和第二转辙机自身接点组6012,都是作为直流转辙机的第一转辙机1以及作为交流转辙机的第二转辙机自身上的接点组,结构相同。
82.第一转辙机自身接点组6011和第二转辙机自身接点组6012,是现有的作为直流转辙机的第一转辙机1和作为交流转辙机的第二转辙机2自身具有的接点组,是现有直流转辙机和交流转辙机上具有的控制转辙机动作状态的电路逻辑单元,具有对转辙机动作逻辑控制功能,可以控制转辙机的动作状态(例如包括拉入位状态、转换状态以及伸出位状态)。具体如下:
83.参见图2a所示,对于第一转辙机自身接点组6011或第二转辙机自身接点组6012,当转辙机自身接点组第一纵排接点和第3纵排接点均接通时,转辙机处于拉入位状态;
84.参见图2b所示,对于第一转辙机自身接点组6011或第二转辙机自身接点组6012,当转辙机自身接点组第一纵排接点和第4纵排接点均接通时,转辙机处于转换状态;
85.参见图2c所示,对于第一转辙机自身接点组6011或第二转辙机自身接点组6012,当转辙机自身接点组第二纵排接点和第4纵排接点均接通时,转辙机处于伸出位状态为例。
86.需要说明的是,以上图2a至图2c所示的控制转辙机的动作状态的功能,是现有的转辙机自身接点组具有的功能,为现有技术,在此不再赘述。
87.需要说明的是,在本实用新型中,所描述的转辙机、电机、接点组不针对任何厂家的产品,仅是基于现有的转辙机的动作过程中接点组的位置关系,来搭建、设置转辙机中电机动作电路的开关逻辑,触发转辙机执行相应的动作。基于国内转辙机的实际情况,在本实用新型中,直流电机(转辙机直流电机501)的工作电压为dc160 v~dc220 v,交流电机(包括转辙机交流电机401)的工作电压为三相ac320 v~dc420 v,接点组为排骨式接点。
88.具体实现上,直流转辙机作为现有的转辙机,例如可以采用天津铁路信号有限责任公司生产的zd6型直流转辙机或zd9型直流转辙机。交流转辙机作为现有的转辙机,可以采用天津铁路信号有限责任公司生产的zdj9型交流转辙机。
89.在本实用新型中,转辙机自身接点组(包括第一转辙机自身接点组6011或第二转辙机自身接点组6012),主要是根据转辙机所处的位置,来接通不同的开关量,进而实现转辙机的互控电路逻辑。
90.参见图3所示,在本实用新型中,对于第第一转辙机自身接点组6011和第二转辙机自身接点组6012,转辙机自身接点组(第一转辙机自身接点组6011或第二转辙机自身接点组6012)的结构示意如图3所示,其中第1纵排、第2纵排、第3纵排及第4纵排均为静接点组(即图3所示的第1纵排静接点组j1、第2纵排静接点组j2、第3纵排静接点组j3和第4纵排静
接点组j4),即安装后相对静止;
91.在本实用新型中,第1纵排静接点组j1和第2纵排静接点组j2之间,以及第3纵排静接点组j3和第4纵排静接点组j4之间,分别具有一个包括3个导电环的动接点组d(每排静接点组包括3对接点开关,每个导电环与一个对接点开关相对应设置);
92.在此需要说明的是,静接点组和动接点组的结构设计、工作原理,为现有转辙机中公知的技术结构和工作原理,在此不再赘述。
93.即动接点组会根据要让转辙机进行的不同动作状态,来对应接通不同的静接点组。动接点组在接通不同的静接点组时,可以触发转辙机进行不同的动作,从而让转辙机处于不同的动作状态。
94.其中,每排静接点组由3对接点开关组成(每对接点开关,包括两个接点),主要是基于转辙机现场控制电路所需开关的数量设置,而进行本实用新型所述的转辙机互控换向动作电路设计时,并不需要全部使用,选择其中任意对应排的接点开关均可。
95.在本实用新型中,转辙机的动作状态,包括拉入位状态、转换状态以及伸出位状态。其中,拉入、转换、伸出等动作状态均是以转辙机的杆件伸出端的状态进行定义的,一般情况下,对于转辙机,静接点组的第1纵排和第3纵排接通时为拉入位状态,第1纵排和第4纵排接通时为转换状态,第2纵排和第4纵排接通时为伸出位状态。用拉入或伸出进行描述,主要是为区分转辙机的动接点组的位置。
96.在本实用新型中,具体实现上,参见图1所示,关于第一转辙机自身接点组6011和第二转辙机自身接点组6012,两者通过导线相导电连接,具体的连接结构如下:
97.其中,对于第一转辙机自身接点组6011,其第一纵排第一对接点的接点15(即一个端口),与第二转辙机自身接点组6012中第二纵排第一对接点的接点25,通过导线相导电连接;
98.对于第一转辙机自身接点组6011,其第二纵排第一对接点的接点25(即一个端口),与第二转辙机自身接点组6012中第四纵排第一对接点的接点45,通过导线相导电连接;
99.对于第一转辙机自身接点组6011,其第三纵排第一对接点的接点35(即一个端口),与第二转辙机自身接点组6012中第一纵排第一对接点的接点15,通过导线相导电连接;
100.对于第一转辙机自身接点组6011,其第四纵排第一对接点的接点45(即一个端口),与第二转辙机自身接点组6012中第三纵排第一对接点的接点35,通过导线相导电连接;
101.其中,对于第一转辙机自身接点组6011,其第二纵排第二对接点的接点23(即一个端口),与第二转辙机自身接点组6012中第四纵排第二对接点的接点43,通过导线相导电连接;
102.对于第一转辙机自身接点组6011,其第三纵排第二对接点的接点33(即一个端口),与第二转辙机自身接点组6012中第一纵排第二对接点的接点13,通过导线相导电连接;
103.在本实用新型中,具体实现上,参见图1所示,关于转辙机直流电机501和第一转辙机自身接点组6011相导电连接,具体的连接结构如下:
104.转辙机直流电机501的直流接线端d2,与第一转辙机自身接点组6011中第一纵排第一对接点的接点16,通过导线相导电连接;
105.转辙机直流电机501的直流接线端d1,与第一转辙机自身接点组6011中第一纵排第一对接点的接点46,通过导线相导电连接;
106.在本实用新型中,具体实现上,参见图1所示,关于转辙机交流电机401和第二转辙机自身接点组6012相导电连接,具体的连接结构如下:
107.转辙机交流电机401中的交流接线端v1,与第二转辙机自身接点组6012中第一纵排第二对接点的接点14和第四纵排第一对接点的接点46,通过导线相导电连接;
108.转辙机交流电机401中的交流接线端w1,与第二转辙机自身接点组6012中第一纵排第一对接点的接点16和第四纵排第二对接点的接点44,通过导线相导电连接。
109.为了更加清楚地理解本实用新型的技术方案,下面结合具体实施例,来进行详细说明。
110.实施例。
111.在本实用新型中,具体实现上,本实用新型的电路,其实施例的电路结构如图1所示,在实施例中,采用一个交流电源和一个直流电源,进行两台不同电源制式的转辙机的跑合试验(即磨合试验)或寿命试验
112.参见图1所示,交流电源101的c相端、b相端和a相端,分别与第一控制开关3011的动触点1、动触点2和动触点3相连接;
113.其中,对于第一控制开关3011,其包括静触点4、静触点5和静触点6,静触点4、静触点5和静触点6分别与动触点1、动触点2和动触点3对应设置;
114.其中,第一控制开关3011的静触点4,分别通过导线与第一转辙机自身接点组6011中第二纵排第二对接点的接点24和第三纵排第二对接点的接点34相导电连接;
115.第一控制开关3011的静触点5,分别通过导线与第一转辙机自身接点组6011中第二纵排第一对接点的接点26和第三纵排第一对接点的接点36相导电连接;
116.第一控制开关3011的静触点6,通过导线,与转辙机交流电机401中的交流接线端u1相导电连接。
117.其中,直流电源201的电压输出端dz和电压输出端df,分别与第二控制开关3012的动触点1和动触点2相连接;
118.对于第二控制开关3012,其包括静触点3和静触点4,静触点3和静触点4分别与动触点1和动触点2对应设置;
119.其中,第二控制开关3012的静触点3,分别通过导线与第二转辙机自身接点组6012中第二纵排第一对接点的接点26和第三纵排第一对接点的接点36相导电连接;
120.第二控制开关3012的静触点4,通过导线,与转辙机直流电机501中的直流接线端d4相导电连接。
121.需要说明的是,第一控制开关3011采用三刀三掷开关(隔离开关),第二控制开关3012采用双刀双掷开关(隔离开关)。
122.为方便对本实用新型中转辙机互控原理的理解,现就图1控制电路中,两台转辙机的动作过程进行逐步说明,具体过程如下:
123.初始状态:第一转辙机与第二转辙机均处于拉入位状态,即接点组第1纵排和第3
纵排接通。
124.第1步:参见图4a所示,第一转辙机处于拉入位状态,其接点组第1纵排和第3纵排接通;第二转辙机伸出启动,之前的状态是:其接点组第1纵排和第3纵排接通。
125.第2步:参见图4b所示,第一转辙机处于拉入位状态,其接点组第1纵排和第3纵排接通;第二转辙机处于伸出转换状态,其接点组第1纵排和第4纵排接通。
126.第3步:参见图4c所示,第一转辙机处于拉入位状态,接点组第1纵排和第3纵排接通;第二转辙机伸出到位(即处于伸出位状态),接点组第1纵排断开,切断电机电源,其接点组第2纵排和第4纵排接通。
127.第4步:参见图4d所示,第一转辙机伸出启动,之前的状态是:其接点组第1纵排和第3纵排接通;第二转辙机伸出位状态,其接点组第2纵排和第4纵排接通。
128.第5步:参见图4e所示,第一转辙机处于伸出转换状态,其接点组第1纵排和第4纵排接通;第二转辙机处于伸出位状态,其接点组第2纵排和第4纵排接通。
129.第6步:参见图4f所示,第一转辙机伸出到位(即处于伸出位状态),其接点组第1纵排断开,切断电机电源,接点组第2纵排和第4纵排接通;第二转辙机处于伸出位状态,其接点组第2纵排和第4纵排接通。
130.第7步:参见图4g所示,第一转辙机处于伸出位状态,其接点组第2纵排和第4纵排接通;第二转辙机拉入启动,之前的状态是:接点组第2纵排和第4纵排接通。
131.第8步:参见图4h所示,第一转辙机处于伸出位状态,接点组第2纵排和第4纵排接通;第二转辙机处于拉入转换状态,接点组第1纵排和第4纵排接通。
132.第9步:参见图4i所示,第一转辙机处于伸出位状态,其接点组第2纵排和第4纵排接通;第二转辙机拉入到位(即处于拉入位状态),其接点组第4纵排断开,切断电机电源,接点组第1纵排和第3纵排接通。
133.第10步:参见图4j所示,第一转辙机拉入启动,之前的状态是:其接点组第2纵排和第4纵排接通;第二转辙机处于拉入位状态,其接点组第1纵排和第3纵排接通。
134.第11步:参见图4k所示,第一转辙机处于拉入转换状态,其接点组第1纵排和第4纵排接通;第二转辙机处于拉入位状态,其接点组第1纵排和第3纵排接通。
135.第12步:参见图4l所示,第一转辙机拉入到位(即处于拉入位状态),接点组第4纵排断开,切断电机电源,接点组第1纵排和第3纵排接通;第二转辙机处于拉入位状态,其接点组第1纵排和第3纵排接通。
136.两台转辙机一个动作循环结束,转辙机接点组恢复至初始状态。
137.需要说明的是,对于本实用新型,拉入(或者伸出)启动,表示转辙机杆件往拉入(或者伸出)方向动作的电源回路沟通,即接点处于2排和4排接通(1排和3排接通);拉入(或者伸出)转换状态,表示转辙机杆件往拉入(或者伸出)方向转换过程中,即接点处于1排和4排接通(或者1排和4排接通);拉入(或者伸出)到位,表示转辙机杆件往拉入(或者伸出)方向动作结束,即接点处于1排和3排接通(或者2排和4排接通)。
138.对于本实用新型,拉入(或者伸出)启动,对应转辙机伸出位状态(或者拉入位状态);拉入(或者伸出)到位,对应转辙机拉入位状态(或者伸出位状态)。
139.还需要说明的是,处于拉入位状态,即处于拉入到位状态(也可以称为拉入位静止状态);
140.处于伸出位状态,即处于伸出到位状态(也可以称为伸出位静止状态)。
141.在本实用新型中,具体实现上,第一转辙机1为直流转辙机,其具有的转辙机直流电机为双向旋转电机,d1、d2、d3和d4为电机线圈引出线端,其中d3为电机线圈短接端;d1和d4通电,则电机将正向旋转;d2和d4通电,则电机将反向旋转。
142.在本实用新型中,具体实现上,第二转辙机2为三相交流转辙机,其具有的转辙机交流电机为双向旋转电机,u1、v1、w1为电机线圈引出线端,其中,当u1、v1、w1分别接通电源a、b、c三相电源时,电机将正向旋转;当u1、v1、w1分别接通电源a、c、b三相电源时,电机将反向旋转。
143.在本实用新型中,具体实现上,交流电源101,可以根据转辙机工作电压的实际情况选择,例如可以是ac320 v~dc420 v范围内的任意电压的电源。
144.具体实现上,直流电源201可以根据转辙机工作电压的实际情况选择,例如可以是dc160 v~dc220 v范围内的任意电压的电源。
145.具体实现上,对于直流电源201,其中的电压输出端dz和电压输出端df,分别表示直流电源的正极和负极。
146.在本实用新型中,需要说明的是,交流电源101和直流电源201,用于作为转辙机的动力源;
147.第一主控制开关3011和第二主控制开关3012,用于作为接通或切断交流电源输出线路的开关;
148.转辙机交流电机401,是现有三相交流转辙机自身具有的交流电机,是用于将电能转换为机械运动的部件;转辙机直流电机501,是是现有直流转辙机自身具有的直流电机,是用于将电能转换为机械运动的部件;
149.第一转辙机自身接点组6011和第二转辙机自身接点组6012,是现有转辙机自身具有的接点组,是现有转辙机上具有的控制转辙机动作状态的电路逻辑单元,具有对转辙机动作逻辑控制功能,可以控制转辙机的动作状态(例如包括拉入位状态、转换状态以及伸出位状态)。
150.在本实用新型中,当图1中的控制开关闭合,两台转辙机将通过自身接点组具有的对转辙机动作的控制逻辑,实现相互交替动作。
151.需要说明的是,对于本实用新型,两台转辙机的交替动作为:第一转辙机拉入
→
第二转辙机拉入
→
第一转辙机伸出
→
第二转辙机伸出
→
第一转辙机拉入
……
,依次循环。
152.当第一转辙机1的控制开关(即第二主控制开关3012)闭合,通过第二转辙机2的控制开关(即第一主控制开关3011)通断,实现第一转辙机1的单次转换控制,而当第二转辙机2的控制开关(即第一主控制开关3011)闭合,可以通过第一转辙机1的控制开关(即第二主控制开关3012)通断,实现第二转辙机2的单次转换控制。
153.在本实用新型中,所述的单次转换控制,是指通过切断、接通其中一台转辙机的电源,使两台转辙机之间的交替动作,仅完成半个循环或一个循环。
154.具体实现上,对于本实用新型,当切断两台转辙机中其中任意电源的控制开关时,两台转辙机之间的交替动作将中止,再次通电后将继续动作,因此可以通过根据电源控制开关通断的时机,来完成对另一台转辙机的单次转换控制。
155.需要说明的是,第一转辙机1和第二转辙机2这两台转辙机,可以通过各自的接点
组,实现转辙机转换到位后自动切断电源,从而停止转换动作。这是转辙机自身具有的功能,是转辙机自身接点组具有的功能,为现有技术,在此不再赘述。
156.在本实用新型中,第一转辙机1可以通过其接点组(即第一转辙机自身接点组6011),接通转辙机2的电源回路;第二转辙机2可以通过其接点组(即第二转辙机自身接点组6012)接通第一转辙机1的电源回路。
157.在本实用新型中,两台交流转辙机,可以通过不同接点组的通断,实现转辙机的换向动作。
158.对于本实用新型,当采用一个交流电源和一个直流电源,可以进行两台不同电源制式的转辙机的跑合试验和寿命试验等性能指标的测试工作。
159.对于本实用新型,该电路可以通过每个电源的控制开关,实现转辙机的单次转换实验。
160.相对于现有技术,本实用新型提供的交直流铁路信号转辙机互控换向动作电路,具有以下优势:
161.1、本实用新型的动作电路,可通过原有转辙机自身接点组的自身逻辑控制原理,实现两台转辙机的交替动作,即能够实现第一转辙机1转换到位后自动切断其电源,从而停止转换,并接通第二转辙机2的电源回路使其转换,在转辙机2到位后,可以自动切断其电源,从而停止转换,并接通第一转辙机1反向动作电源回路,使其反向动作,在第一转辙机1反向动作到位后自动切断其电源,从而停止转换,并接通第二转辙机2反向动作电源回路,使其反向动作,进而完成两台转辙机的交替动作。
162.2、本实用新型的动作电路,可以在没有转辙机专用控制系统的情况下,完成转辙机设备的跑合实验,并且该电路的逻辑开关直接采用了转辙机自身接点组,具有承受大电流冲击的能力。
163.3、本实用新型的动作电路,可以采用一个交流电源和一个直流电源,进行两台不同电源制式的转辙机的跑合试验(即磨合试验)或者寿命试验等性能指标的测试工作;
164.4、对于本实用新型,该电路可以通过每个电源的控制开关,实现转辙机的单次转换实验。
165.综上所述,与现有技术相比较,本实用新型提供的一种交直流铁路信号转辙机互控换向动作电路,其结构设计科学,该动作电路不需要传统的转辙机专用控制系统,通过对一台交流转辙机和一台直流转辙机的自身接点组进行通断控制(即接通或者断开控制),结合交流转辙机和直流转辙机自身接点组具有的转辙机动作逻辑控制功能,即可实现控制转辙机进行连续往返动作或者单次动作(即单次拉入或者单次伸出动作),从而满足两台不同电源制式的转辙机的跑合试验(即磨合试验)以及寿命试验需求,具有重大的实践意义。
166.对于本实用新型提供的交直流铁路信号转辙机互控换向动作电路,由于该动作电路对转辙机动作的控制逻辑是采用转辙机自身接点组来实现,因此可以承受较大电流的冲击,保证具有较长的使用寿命。
167.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。