1.本实用新型涉及轨道交通领域中的司机控制器。
背景技术:
2.轨道交通近些年来在我国的交通运输领域中占据着不可或缺的地位,而司机控制器作为轨道交通的主令电器,其在轨道交通列车中也是不可缺少的,常见的司机控制器其组成主要分为牵引制动手柄,方向手柄,钥匙开关。目前常用的司机控制器构成大都是由牵引制动手柄,方向手柄,钥匙开关三者或两者组合而成。而这样的司机控制器有以下缺点:1.安装位置受限。2.司机控制器模块多,并且主体大多为金属件,导致重量较大。3.结构复杂,维护不便。
技术实现要素:
3.本实用新型的目的在于解决现有问题,提供一种安装尺寸小、维护方便、可靠性高的自复位司机控制器。
4.为解决上述问题,本实用新型的技术方案是,一种自复位司机控制器,包括牵引制动手柄、其特征是还包括四个立板、弹片、拉伸弹簧、凸轮轴、电位器安装板、面板、微动开关、电位器;
5.所述牵引制动手柄通过第一立板、第二立板、面板连接柱、弹片连接柱连接;所述牵引制动手柄上安装有牵引制动手柄轴芯、牙板、主动伞齿轮、滚子、滚子轴芯;
6.所述凸轮轴上安装有凸轮、圆齿轮、限位轮、从动伞齿轮;所述凸轮轴安装于第三立板和电位器安装板之间;所述电位器安装在电位器安装板上,电位器齿轮安装在电位器上;
7.所述第三立板与电位器安装板通过微动开关连接柱和六方连接柱连接;所述第三立板安装在弹片连接柱上,调节器安装在第三立板上;
8.所述拉伸弹簧安装在限位拉杆与第一立板之间,限位拉杆安装在第一立板上;
9.所述牵引制动手柄通过主动伞齿轮与凸轮轴连接,凸轮轴与电位器之间通过电位器齿轮进行连接。
10.进一步地,所述调节器由调节器安装座、调节器顶杆、螺套、滚轮、压缩弹簧组成,其中滚轮安装在调节器顶杆上,调节器顶杆安装在调节器安装座前端,螺套安装在调节器安装座后端。
11.进一步地,弹片安装在弹片连接柱上。
12.进一步地,面板安装在面板连接柱上。
13.进一步地,,所述微动开关安装在微动开关连接柱上。
14.本实用新型将司机控制器设计为单手柄操作的模式,其主要架构包含了牵引制动手柄、面板、主动伞齿轮、凸轮轴、连接柱等。
15.牵引制动手柄通过主动伞齿轮与凸轮轴连接,凸轮轴与电位器之间同样采用齿轮
进行连接,凸轮轴上安装有凸轮,通过凸轮上的凹槽与触点的杠杆与滚轮进行动作,实现触头的闭合与断开,其余各结构件之间采用连接柱进行连接。
16.牵引制动手柄为牵引自复位式,通过拉伸弹簧拉动限位拉杆,然后限位拉杆通过压动手柄上的滚子使手柄自动复位,手柄复位到垂直位时,通过限位轮及牙板对牵引制动手柄进行定位。
17.本实用新型有益效果:将手柄设计为单手柄形式,并采用锥齿轮传动,极大的减小了司机控制器的空间,司机控制器手柄设计为牵引自复位式,增加司机操纵的安全可靠性,司机控制器输出信号采用高精度电位计与触头配合输出,输出信号稳定、准确可靠。
附图说明
18.图1是主动锥齿轮安装示意图。
19.图2是牙板安装示意图。
20.图3是主体结构自复位部件安装示意图。
21.图4是主体之间连接示意图。
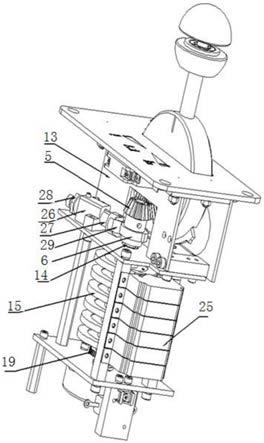
22.图5是主体各零部件安装示意图。
23.图6是自复位限位装置限位示意图。
具体实施方式
24.为了使本实用新型的目的、技术方案和优点更加清楚,下面将对本实用新型的技术方案进行详细描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所得到的所有其他实施方式,都属于本实用新型所保护的范围。
25.本实施例自复位司机控制器采用自复位单手柄设计,包含牵引制动手柄1、牵引制动手柄轴芯2、牙板3、主动伞齿轮4、从动伞齿轮5、限位轮6、限位拉杆7、滚子8、滚子轴芯9、弹片10、拉伸弹簧11、第一立板12、第二立板13、凸轮轴14、凸轮15、第三立板16、电位器安装板17、圆齿轮18、电位器齿轮19、微动开关连接柱20、六方连接柱21、面板连接柱22、弹片连接柱23、面板24、微动开关(25)、调节器安装座26、调节器顶杆27、螺套28、滚轮29、压缩弹簧30、电位器31。
26.如图1、图2所示,牵引制动手柄轴芯2、牙板3、主动伞齿轮4、滚子8、滚子轴芯9安装在牵引制动手柄1上。
27.如图3、图4、图5所示,牵引制动手柄1通过第一立板12、第二立板13、面板连接柱22、弹片连接柱23进行连接;凸轮15、圆齿轮18、限位轮6、从动伞齿轮5安装在凸轮轴17上,凸轮轴14安装于第三立板16和电位器安装板17之间,第三立板16与电位器安装板17通过微动开关连接柱20和六方连接柱21进行连接;第三立板16安装在弹片连接柱23上;微动开关25安装在微动开关连接柱20上,电位器31安装在电位器安装板17上,电位器齿轮19安装在电位器上31。
28.当转动牵引制动手柄1时,安装在牵引制动手柄1上的牙板3与主动伞齿轮4随之转动,转动的同时主动伞齿轮4带动安装在凸轮轴17上的从动伞齿轮5转动,从而带动凸轮轴17转动,随之带动安装在凸轮轴17上的凸轮15与圆齿轮18转动,通过凸轮轴17上的圆齿轮
18转动带动电位器齿轮19转动,从而带动电位器31转动。
29.当牵引制动手柄1向前转动时,安装在牵引制动手柄1上的滚子8与安装在第一立板12上的限位拉杆7形成反作用力,从而使安装在第一立板12上的限位拉杆7将安装在限位拉杆7与第一立板12之间的拉伸弹簧11进行拉伸,从而提供给牵引制动手柄1向后复位的作用力。
30.当松开牵引制动手柄1后,拉伸弹簧11拉动限位拉杆7压迫安装在牵引制动手柄1上的滚子8使牵引制动手柄1向垂直位回复,当牵引制动手柄1回复至垂直位时,安装在第三立(16上的调节器(图6所示)与安装在凸轮轴14上的限位轮6进行限位定位。
31.如图6所示,调节器由调节器安装座26、调节器顶杆27、螺套28、滚轮29、压缩弹簧30组成,主要是通过安装在调节器顶杆27上的滚轮29压迫压缩弹簧30,从而给调节器顶杆27一个反向作用力,然后配合安装在凸轮轴14上的限位轮6,对牵引制动手柄1进行限位定位。
技术特征:
1.一种自复位司机控制器,包括牵引制动手柄(1)、其特征是还包括四个立板、弹片(10)、拉伸弹簧(11)、凸轮轴(14)、电位器安装板(17)、面板(24)、微动开关(25)、电位器(31);所述牵引制动手柄(1)通过第一立板(12)、第二立板(13)、面板连接柱(22)、弹片连接柱(23)连接;所述牵引制动手柄(1)上安装有牵引制动手柄轴芯(2)、牙板(3)、主动伞齿轮(4)、滚子(8)、滚子轴芯(9);所述凸轮轴(14)上安装有凸轮(15)、圆齿轮(18)、限位轮(6)、从动伞齿轮(5);所述凸轮轴(14)安装于第三立板(16)和电位器安装板(17)之间;所述电位器(31)安装在电位器安装板(17)上,电位器齿轮(19)安装在电位器上(31);所述第三立板(16)与电位器安装板(17)通过微动开关连接柱(20)和六方连接柱(21)连接;所述第三立板(16)安装在弹片连接柱(23)上,调节器安装在第三立板(16)上;所述拉伸弹簧(11)安装在限位拉杆(7)与第一立板(12)之间,限位拉杆(7)安装在第一立板(12)上;所述牵引制动手柄(1)通过主动伞齿轮(4)与凸轮轴(14)连接,凸轮轴(14)与电位器(31)之间通过电位器齿轮(19)进行连接。2.如权利要求1所述的自复位司机控制器,其特征是,所述调节器由调节器安装座(26)、调节器顶杆(27)、螺套(28)、滚轮(29)、压缩弹簧(30)组成,其中滚轮(29)安装在调节器顶杆(27)上,调节器顶杆(27)安装在调节器安装座(26)前端,螺套(28)安装在调节器安装座(26)后端。3.如权利要求1所述的自复位司机控制器,其特征是,所述弹片(10)安装在弹片连接柱(23)上。4.如权利要求1所述的自复位司机控制器,其特征是,所述面板(24)安装在面板连接柱(22)上。5.如权利要求1所述的自复位司机控制器,其特征是,所述微动开关(25)安装在微动开关连接柱(20)上。
技术总结
本实用新型公开了一种自复位司机控制器,其主要架构包含了牵引制动手柄、面板、主动伞齿轮、凸轮轴、连接柱等。牵引制动手柄通过主动伞齿轮与凸轮轴连接,凸轮轴与电位器之间同样采用齿轮进行连接,凸轮轴上安装有凸轮,通过凸轮上的凹槽与触点的杠杆与滚轮进行动作,实现触头的闭合与断开,其余各结构件之间采用连接柱进行连接。牵引制动手柄为牵引自复位式,通过拉伸弹簧拉动限位拉杆,然后限位拉杆通过压动手柄上的滚子使手柄自动复位,手柄复位到垂直位时,通过限位轮及牙板对牵引制动手柄进行定位。极大的减小了司机控制器的空间,增加司机操纵的安全可靠性。司机操纵的安全可靠性。司机操纵的安全可靠性。
技术研发人员:郭希锋 曹福龙 胡亚峰 王涛
受保护的技术使用者:西安驰必易电气有限公司
技术研发日:2021.04.02
技术公布日:2021/12/16