1.本发明涉及建筑外墙雨棚技术领域,具体涉及一种建筑外墙自清洗雨棚,还涉及一种建筑外墙自清洗雨棚的清洗方法。
背景技术:
2.在现有技术中,建筑外墙雨棚一般设置在建筑大门入口处,起到遮雨作用,一般建筑外墙雨棚采用钢龙骨与建筑内梁一体化浇筑连接,钢龙骨上架设夹胶安全玻璃,并且通过吊索将钢龙骨外端与建筑外墙连接,夹胶安全玻璃也可以用钢筋混凝土挑板代替,或者建筑外墙雨棚也可以采用钢龙骨+包铝板幕墙的方式实现。
3.建筑外墙雨棚顶面极其容易落灰,形成污渍点或者污渍面,影响建筑整体美观,一般需要清理建筑外墙雨棚顶面时,需要架梯,人工爬上建筑外墙雨棚顶面,大面积使用清洁剂和水进行污渍清除,造成顶面湿滑,清洁人员容易打滑摔跤,清洁危险较大,同时大量使用清洁液和水造成资源浪费和污染,且污水会滴落到地面,造成地面污染。
技术实现要素:
4.本发明的目的是在于针对现有技术存在的上述问题,提供了一种建筑外墙自清洗雨棚。
5.为了实现上述目的,本发明采用以下技术方案:
6.一种建筑外墙自清洗雨棚,包括雨棚面板,雨棚面板顶面两侧设置有两个导轨装置,两个导轨装置的导轨条平行设置在雨棚面板顶面两侧,两个导轨装置的滑块上均设置有横梁支架,横梁两端固定在横梁支架上,横梁内部为空心,药剂管和用水管设置在横梁内,横梁底面两端设置有喷淋轴承座,喷淋管两端分别设置在两个喷淋轴承座上,横梁的底部设置有轨道气缸,轨道气缸的滑块部与喷淋管连接,喷淋管上设置有多个喷嘴,每个喷嘴包括药剂输入口、用水输入口和一个垂直朝下的喷头,药剂输入口通过药剂螺旋软管与药剂管连接,用水输入口通过用水螺旋软管与用水连接,药剂管的端部通过药剂供液螺旋软管与药剂箱中的药剂泵连接,用水管的端部通过用水供液螺旋软管与用水箱中的用水泵连接,
7.横梁底面两端分别设置有垂直推杆气缸,两个垂直推杆气缸的伸缩端分别与擦拭杆两端连接,
8.建筑外壁设置有无线摄像头,横梁顶部设置有光强传感器,横梁内设置有控制器,药剂螺旋软管上设置有药剂电动阀,用水螺旋软管上设置有用水电动阀,控制器分别与光强传感器、无线摄像头、导轨装置、轨道气缸、药剂电动阀、用水电动阀、垂直推杆气缸、药剂泵、以及用水泵连接。
9.如上所述的雨棚面板设置在支架梁上,支架梁与建筑内梁连接,雨棚面板还通过吊索与建筑外墙连接。
10.如上所述的雨棚面板为矩形,两个导轨装置的导轨条平行设置在雨棚面板顶面的
两侧的短边处,两个导轨装置的导轨条的长度均与雨棚面板的短边长度一致。
11.如上所述的雨棚面板位于外侧的长边设置有落水槽,落水槽一端通过排水管与集水箱连接。
12.一种建筑外墙自清洗雨棚的清洗方法,包括以下步骤:
13.步骤1、药剂箱注入清洁液,用水箱注入水;
14.步骤2、控制器获取光强传感器的光强数据,若光强传感器的光强数据在设定的光强区间内,则进入步骤3,否则,终止;
15.步骤3、无线摄像头拍摄雨棚面板的原始顶面图片,并将原始顶面图片传输给控制器;
16.步骤4、控制器从接收的原始顶面图片提取两个导轨装置的导轨条的内侧线条,两个内侧线条的四个端点所围的区域在原始顶面图片上对应的区域为待处理顶面图片;
17.步骤5、控制器对待处理顶面图片进行处理获得待处理顶面灰度图片;
18.步骤6、控制器将待处理顶面灰度图片转换为矩形顶面灰度图片;
19.步骤7、控制器根据矩形顶面灰度图片判断是否需要进行自清洁;
20.若不需要进行自清洁,则终止;
21.若需要进行自清洁,则进入下一步骤;
22.步骤8、控制器根据矩形顶面灰度图片进行阈值分割,获得仅包含赃物覆盖区的二值图像,
23.步骤9、对二值图像进行连通域分析,提取连通域面积大于设定面积阈值的连通域,并确定连通域面积大于设定面积阈值的连通域作为待清洗连通域,
24.步骤10、关闭药剂泵和用水泵,关闭各个喷嘴对应的药剂电动阀和用水电动阀,控制器驱动两个导轨装置的滑块同步以设定步进距离自行程起点至行程终点向远离建筑外墙的方向运动,控制器驱动横梁远离建筑外墙移动设定步进距离后,计算各个喷头中心在雨棚面板上的投影点的位置,计算上述投影点在矩形顶面灰度图片对应的投影像素点;
25.步骤11、若部分或者全部喷嘴中心在雨棚面板上的投影点对应在矩形顶面灰度图片中的投影像素点落在待清洗连通域,则落在待清洗连通域的投影像素点对应的喷嘴所连接的药剂电动阀和用水电动阀均开启,没有落在待清洗连通域的投影像素点对应的喷嘴所连接的药剂电动阀关闭且用水电动阀开启,开启药剂泵和用水泵,
26.若全部喷嘴中心在雨棚面板上的投影点对应在矩形顶面灰度图片中的投影像素点均没有落在待清洗连通域或者不存在待清洗连通域,则所有喷嘴所连接的药剂电动阀关闭且用水电动阀开启,药剂泵关闭且用水泵开启,
27.步骤12、若控制器驱动两个导轨装置的滑块运动至行程终点,则进入步骤13,否则,控制器驱动横梁远离建筑外墙移动设定步进距离后,计算各个喷头中心在雨棚面板上的投影点的位置,计算上述投影点在矩形顶面灰度图片对应的投影像素点,返回步骤11;
28.步骤13、控制器控制轨道气缸的滑块部移动设定平移距离,进而带动喷淋管沿喷淋管中心轴方向移动设定平移距离;
29.步骤14、关闭药剂泵和用水泵,关闭各个喷嘴对应的药剂电动阀和用水电动阀,控制器驱动两个导轨装置的滑块同步以设定步进距离自行程终点至行程起点向靠近建筑外墙的方向运动,控制器驱动横梁朝向建筑外墙移动设定步进距离后,计算各个喷头中心在
雨棚面板上的投影点,计算上述投影点在矩形顶面灰度图片对应的投影像素点;
30.步骤15、重复步骤11后进入步骤16;
31.步骤16、若控制器驱动两个导轨装置的滑块运动至行程起点,关闭药剂泵和用水泵,关闭各个喷嘴对应的药剂电动阀和用水电动阀,控制器控制轨道气缸的滑块部反向移动设定平移距离,进而带动喷淋管沿喷淋管中心轴方向反向移动设定平移距离,等待设定时间后进入下一步骤,
32.步骤17、控制器控制横梁底面两端的垂直推杆气缸伸缩端伸出,将擦拭杆与雨棚面板顶面相抵,控制器再控制两个导轨装置的滑块自行程起点至行程终点运动,控制器再控制横梁底面两端的垂直推杆气缸伸缩端缩回,最后控制器再控制两个导轨装置的滑块自行程终点至行程起点运动,返回步骤3。
33.如上所述的步骤6包括以下步骤:
34.将待处理顶面灰度图片以底边进行行像素点长度对齐,对于像素点长度小于底边的像素点长度的行,进行像素点插值处理获得矩形顶面灰度图片。
35.如上所述的步骤7中控制器根据矩形顶面灰度图片判断是否需要进行自清洁包括以下步骤:
36.步骤7.1、对步骤2设定的光强区间进行分段,获得连续的光强区间段;
37.步骤7.2、判断光强传感器测量的光强数据落入的光强区间段,选取光强数据落入的光强区间段对应的灰度值阈值,求取矩形顶面灰度图片的像素点平均灰度值,将像素点平均灰度值与灰度值阈值进行比较,若像素点平均灰度值小于等于灰度值阈值,则需要进行自清洁;若像素点平均灰度值大于灰度值阈值,则不需要进行自清洁。
38.如上所述的步骤8中控制器根据矩形顶面灰度图片进行阈值分割包括以下步骤:
39.步骤8.1、对步骤2设定的光强区间进行分段,获得连续的光强区间段;
40.步骤8.2、判断光强传感器测量的光强数据落入的光强区间段,选取光强数据落入的光强区间段对应的灰度分割阈值,依据灰度分割阈值对矩形顶面灰度图片进行阈值分割。
41.本发明与现有技术相比,具有以下有益效果:
42.1、本发明可以实现自动化雨棚面板顶面的清洗;
43.2、可以根据识别的待清洗连通域,自适应喷洒清洁剂,减少清洁剂的使用,减少污染,减少水的用量,节约水资源;
44.3、可以用最少的导轨装置的驱动过程以及最少的喷嘴数量,更好的对雨棚面板顶面进行喷洒遍历;
45.4、智能识别雨棚面板的顶面的污染情况,进行是否进行自清洗识别。
附图说明
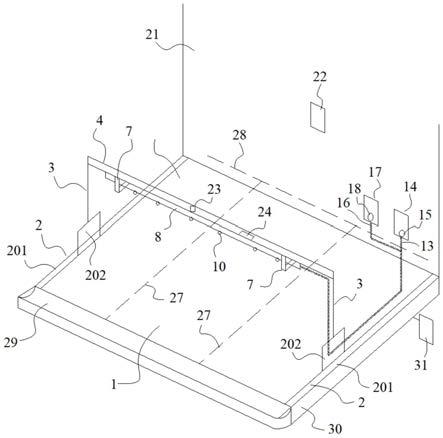
46.图1为本发明的结构示意图。
47.图2为喷淋管的连接结构示意图。
48.图3为擦拭杆的连接结构示意图。
49.图中:1-雨棚面板;2-导轨装置;201-导轨条;202-滑块;3-横梁支架;4-横梁;5-药剂管;6-用水管;7-喷淋轴承座;8-喷淋管;9-轨道气缸;10-喷嘴;101-药剂输入口;102-用
水输入口;103-喷头;11-药剂螺旋软管;12-用水螺旋软管;13-药剂供液螺旋软管;14-药剂箱;15-药剂泵;16-用水供液螺旋软管;17-用水箱;18-用水泵;19-垂直推杆气缸;20-擦拭杆;21-建筑外壁;22-无线摄像头;23-光强传感器;24-控制器;25-药剂电动阀;26-用水电动阀;27-支架梁;28-建筑内梁;29-落水槽;30-排水管;31-集水箱。
具体实施方式
50.为了便于本领域普通技术人员理解和实施本发明,下面结合实施例对本发明作进一步的详细描述,应当理解,此处所描述的实施示例仅用于说明和解释本发明,并不用于限定本发明。
51.实施例1:
52.一种建筑外墙自清洗雨棚,包括雨棚面板1,雨棚面板1可以是底面设置有毛面的夹胶玻璃,也可以是钢筋混凝土挑板,也可以是包铝板幕墙,雨棚面板1顶面两侧设置有两个导轨装置2,两个导轨装置2的导轨条201平行设置在雨棚面板1顶面两侧,两个导轨装置2的滑块202上均设置有横梁支架3,横梁4两端固定在横梁支架3上,横梁4内部为空心,药剂管5和用水管6设置在横梁4内,横梁4底面两端设置有喷淋轴承座7,喷淋管8两端分别设置在两个喷淋轴承座7上,横梁4的底部设置有轨道气缸9,轨道气缸9的滑块部与喷淋管8连接,轨道气缸9用于驱动喷淋管8在喷淋轴承座7的支撑下沿喷淋管中心轴移动设定距离,喷淋管8上设置有多个喷嘴10,各个喷嘴10沿喷淋管8均匀分布,每个喷嘴10包括药剂输入口101、用水输入口102和一个垂直朝下的喷头103,喷头103能垂直向雨棚面板1点喷射或者呈一定放射角度喷射,药剂输入口101通过药剂螺旋软管11与药剂管5连接,用水输入口102通过用水螺旋软管12与用水管6连接,在喷淋管8横向移动时,由于药剂螺旋软管11和用水螺旋软管12具备一定的伸缩弹性,可以适配性的伸长或者缩短,使得药剂输入口101与药剂管5之间、用水输入口102与用水管6之间为柔性连接,药剂管5的端部通过药剂供液螺旋软管13与药剂箱14中的药剂泵15连接,用水管6的端部通过用水供液螺旋软管16与用水箱17中的用水泵18连接。药剂供液螺旋软管13和用水供液螺旋软管16也起到柔性连接的作用,优选的,药剂供液螺旋软管13和用水供液螺旋软管16)中转固定在最接近的导轨装置2的滑块202上。
53.横梁4底面两端分别设置有垂直推杆气缸19,两个垂直推杆气缸19的伸缩端分别与擦拭杆20两端连接,两个垂直推杆气缸19的伸缩端可以在控制器24的驱动下,同步向下伸出或者向上缩回,同步向下伸出时,将擦拭杆20与雨棚面板1顶面相抵,擦拭杆20的轴线平行于雨棚面板1的长度方向,擦拭杆20的长度略小于两个导轨装置2的导轨条201之间的间距,擦拭杆20包括杆体和沿杆体设置的柔性橡胶条或者柔性塑料条,垂直推杆气缸19的伸缩杆伸出时,擦拭杆20的柔性橡胶条与雨棚面板1顶面相抵。
54.建筑外壁21设置有无线摄像头22,无线摄像头22用于从雨棚面板1侧上方拍摄雨棚面板1顶面的相片,并通过无线传输给控制器24,横梁4顶部设置有光强传感器23,光强传感器23用于测量当前光强情况,由于在不同光强情况下,无线摄像头22拍摄的雨棚面板1顶面的相片会不同,在判断是否需要自清洁时,需要结合光强进行判断。横梁4内设置有控制器24,药剂螺旋软管11上设置有药剂电动阀25,用水螺旋软管12上设置有用水电动阀26,控制器24分别与光强传感器23、无线摄像头22、导轨装置2、轨道气缸9、药剂电动阀25、用水电
动阀26、垂直推杆气缸19、药剂泵15、以及用水泵18连接。控制器24用于接收光强传感器23的光强数据;还用于接收无线摄像头22拍摄的雨棚面板1顶面的相片;还用于控制导轨装置2的滑块和轨道气缸2的滑块部运动以及运动方向;还用于控制药剂电动阀25和用水电动阀26的开关,还用于控制药剂泵15和用水泵18的启停;还用于控制垂直推杆气缸19的伸缩端的和缩回。
55.优选的,雨棚面板1设置在支架梁27上,支架梁27与建筑内梁28连接,雨棚面板1还通过吊索与建筑外墙连接。
56.优选的,雨棚面板1为矩形,并行于建筑外墙的两个侧边为长边,另外两对侧边为短边(宽边),两个导轨装置2的导轨条201平行设置在雨棚面板1顶面的两侧的短边处,两个导轨装置2的导轨条201的长度均与雨棚面板1的短边长度一致。
57.雨棚面板1位于外侧的长边设置有落水槽29,落水槽29一端通过排水管30与集水箱31连接。通过擦拭杆20从内侧至外侧对雨棚面板1顶面对刮拭,将污水推至落水槽29,并经排水管流入到集水箱31中,集水箱31、药剂箱14和用水箱17均可设置在建筑外墙的隐藏门后的腔室中。
58.作为一种优选方案,光强传感器23还可以设置在落水槽29外侧或者雨棚面板1的短边侧部或者光强传感器23为多个分别设置在落水槽29外侧和雨棚面板1的短边侧部。
59.实施例2:
60.一种建筑外墙自清洗雨棚的清洗方法,利用实施例1所述的一种建筑外墙自清洗雨棚,包括以下步骤:
61.步骤1、药剂箱14注入清洁液,用水箱17注入水。
62.步骤2、控制器24获取光强传感器23的光强数据,若光强传感器23的光强数据在设定光强区间内,则进入步骤3,否则,终止;
63.由于在不同的光强情况下,即使相同程度的灰尘或者赃物附着,无线摄像头22拍摄雨棚面板1的原始顶面图片也会不同,同时由于在不同的时间段,雨棚面板1可能会有太阳强照射或者出现部分阳光照射且另一部分没有阳光照射的情况,太阳强照射产生的反射光斑以及部分阳光照射会对是否需要自清洁的判断产生影响,而雨棚面板1出现被太阳强照射或者出现部分阳光照射且另一部分没有阳光照射的情况时,一般光强传感器23的测得的光强数据是特定光强区域的,因此可以通过选择避开上述特定光强区域的设定光强区间,避开雨棚面板1被太阳强照射或者部分阳光照射且另一部分没有阳光照射的情况,即光强传感器23的光强数据在设定光强区间内时,无线摄像头22拍摄雨棚面板1的原始顶面图片无反光光斑且光照均匀。
64.当光强传感器23为多个时,取光强传感器23的光强的平均值作为光强数据。
65.作为另一种实施方式,可以根据雨棚面板1阳光照射的实际情况,选择早晨、傍晚或者其他时间,雨棚面板1没有直射阳光的情况下对应的光强区间作为设定光强区间。
66.步骤3、无线摄像头22拍摄雨棚面板1的原始顶面图片,并将原始顶面图片传输给控制器24。
67.步骤4、控制器24从接收的原始顶面图片提取两个导轨装置2的导轨条的内侧线条,两个内侧线条的四个端点所围的区域在原始顶面图片上对应的区域为待处理顶面图片。轨道条的颜色是黑色,通过将原始顶面图片转换为灰度图并通过阈值可以判断出轨道
条,进而找出内侧线条,上述待处理顶面图片基本上覆盖雨棚面板1的顶面。
68.步骤5、控制器24对待处理顶面图片进行处理获得待处理顶面灰度图片;
69.步骤6、控制器24将待处理顶面灰度图片转换为矩形顶面灰度图片,具体为:将待处理顶面灰度图片以底边进行行像素点长度对齐,对于像素点长度小于底边的像素点长度的行,进行像素点插值处理获得矩形顶面灰度图片;由于无线摄像头22设置在雨棚面板1的侧上方,因此原始获得的待处理顶面灰度图片并不是规整的矩形,而是类似于等腰梯形,底边是靠近建筑外墙的边,底边比顶边长,为了方便定位,需要将待处理顶面灰度图片转换为矩形顶面灰度图片,每行插值点的个数为插值点所在行的像素点与底边像素点的差值,每行各个插值点均匀分布在对应行,且插值点的值为所在行左右相邻的设定个数的像素点的平均值。
70.步骤7、控制器24根据矩形顶面灰度图片判断是否需要进行自清洁,具体包括以下步骤:
71.步骤7.1、对步骤2设定光强区间进行分段,获得连续的光强区间段;
72.步骤7.2、判断光强传感器23测量的光强数据落入的光强区间段,选取光强数据落入的光强区间段对应的灰度值阈值,求取矩形顶面灰度图片的像素点平均灰度值,将像素点平均灰度值与灰度值阈值进行比较,若像素点平均灰度值小于等于灰度值阈值,则需要进行自清洁;若像素点平均灰度值大于灰度值阈值,则不需要进行自清洁。由于如果设定光强区间较大,即使雨棚面板1是被均匀光照,可能光照强度的不同,导致相片的亮暗程度也会不一样,为了更准确的对雨棚面板1顶面的污染程度进行判断,针对不同的光强区间段,设置不同灰度值阈值,光强区间段的平均光强越大,则灰度阈值越高,从而更准确的判断是否需要进行自清洁。由于灰度值为0时表示纯黑,因此灰度值越小表示污染程度污染越严重。
73.若不需要进行自清洁,则终止;
74.若需要进行自清洁,则进入下一步骤。
75.步骤8、控制器24根据矩形顶面灰度图片进行阈值分割,获得仅包含赃物覆盖区的二值图像,具体包括以下步骤:
76.步骤8.1、对步骤2设定的光强区间进行分段,获得连续的光强区间段;
77.步骤8.2、判断光强传感器23测量的光强数据落入的光强区间段,选取光强数据落入的光强区间段对应的灰度分割阈值,依据灰度分割阈值对矩形顶面灰度图片进行阈值分割。此处对设定光强区间进行分段的原理与步骤7中相同,此处不再赘述。
78.步骤9、对二值图像进行连通域分析,提取连通域面积大于设定面积阈值的连通域,并确定连通域面积大于设定面积阈值的连通域作为待清洗连通域,由于获得的连通域的面积大小不等,对于面积较小的连通域,一般污染面积较小,只需要喷水对其润化即可,对于污染面积较大的部分,单喷水无法对其软化分离,还需要对其喷洒清洁液,以加强对大面积的污染面的软化清洗。
79.步骤10、关闭药剂泵15和用水泵18,关闭各个喷嘴10对应的药剂电动阀25和用水电动阀26,控制器24驱动两个导轨装置2的滑块同步以设定步进距离自行程起点至行程终点向远离建筑外墙的方向运动,控制器24驱动横梁4远离建筑外墙移动设定步进距离后,计算各个喷头103中心在雨棚面板1上的投影点的位置,计算上述投影点在矩形顶面灰度图片
对应的投影像素点;由于喷头103相对于雨棚面板1的运动轨迹是确定的,因此,各个喷头103中心在雨棚面板1上的投影点的位置是确定的,通过坐标转换,将喷头103中心在雨棚面板1上的投影点的位置转换为对应的投影像素点在矩形顶面灰度图片上的坐标。
80.步骤11、若部分或者全部喷嘴10中心在雨棚面板1上的投影点对应在矩形顶面灰度图片中的投影像素点落在待清洗连通域,则落在待清洗连通域的投影像素点对应的喷嘴10所连接的药剂电动阀25和用水电动阀26均开启,没有落在待清洗连通域的投影像素点对应的喷嘴10所连接的药剂电动阀25关闭且用水电动阀26开启,开启药剂泵15和用水泵18,
81.即,当喷头103位于待清洗连通域对应的雨棚面板1的上方时,喷嘴10同时进入清洁液和水,并通过喷头103将清洁液和水的混合液喷射在雨棚面板1上对应于待清洗连通域的位置,对污染处进行强化润化分离。
82.若全部喷嘴10中心在雨棚面板1上的投影点对应在矩形顶面灰度图片中的投影像素点均没有落在待清洗连通域或者不存在待清洗连通域,则所有喷嘴10所连接的药剂电动阀25关闭且用水电动阀26开启,药剂泵15关闭且用水泵18开启,
83.即,当喷头103没有位于待清洗连通域对应的雨棚面板1的上方时,或者雨棚面板1上没有明显的大片污渍时,喷嘴10仅仅通入水,并通过喷头103水喷射在雨棚面板1上对应的位置,对雨棚面板1进行软化润湿。
84.通过以上方式,在保证雨棚面板1能得到有效清洁度前提下,可以减少水和清洁液的使用,特别是减少清洁液的使用,起到环保作用。
85.步骤12、若控制器24驱动两个导轨装置2的滑块运动至行程终点,则进入步骤13,否则,控制器24驱动横梁4远离建筑外墙移动设定步进距离后,计算各个喷头103中心在雨棚面板1上的投影点的位置,计算上述投影点在矩形顶面灰度图片对应的投影像素点,返回步骤11。
86.步骤13、控制器24控制轨道气缸9的滑块部移动设定平移距离,进而带动喷淋管8沿喷淋管中心轴方向移动设定平移距离。由于每个喷嘴10对应一个药剂电动阀25和一个用水电动阀26,喷嘴10不易过密布置,以免导致成本增加以及排布难度增加,但是过少的喷嘴10设置,可能无法很好的将水和清洁液喷洒整个雨棚面板1,由于导轨装置2的滑块运动到雨棚面板的最外侧时,是需要返回的,所以可以在返回之前,驱动喷淋管8轴向移动设定平移距离,相当于是导轨装置2的一个驱动来回,可以实现双倍的喷嘴10遍历喷洒雨棚面板,通过上述步骤,可以用最少的导轨装置2的驱动过程以及最少的喷嘴10数量,更好的对雨棚面板顶面进行喷洒遍历。
87.步骤14、关闭药剂泵15和用水泵18,关闭各个喷嘴10对应的药剂电动阀25和用水电动阀26,控制器24驱动两个导轨装置2的滑块同步以设定步进距离自行程终点至行程起点向靠近建筑外墙的方向运动,控制器24驱动横梁4朝向建筑外墙移动设定步进距离后,计算各个喷头103中心在雨棚面板1上的投影点,计算上述投影点在矩形顶面灰度图片对应的投影像素点;
88.步骤15、重复步骤11后进入步骤16;
89.步骤16、若控制器24驱动两个导轨装置2的滑块运动至行程起点,关闭药剂泵15和用水泵18,关闭各个喷嘴10对应的药剂电动阀25和用水电动阀26,控制器24控制轨道气缸9的滑块部反向移动设定平移距离,进而带动喷淋管8沿喷淋管中心轴方向反向移动设定平
移距离,等待设定时间后进入下一步骤,
90.步骤17、控制器24控制横梁4底面两端的垂直推杆气缸19伸缩端伸出,将擦拭杆20与雨棚面板1顶面相抵,控制器24再控制两个导轨装置2的滑块自行程起点至行程终点运动,从而实现擦拭杆20对雨棚面板顶面的清洗,清洗后的污水落入到落水槽29中,并通过排水管30排入集水箱31,控制器24再控制横梁4底面两端的垂直推杆气缸19伸缩端缩回,最后控制器24再控制两个导轨装置2的滑块自行程终点至行程起点运动,返回步骤3。
91.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。