1.本发明涉及地砖铺设技术领域,具体而言,涉及一种地砖铺设装置及地砖铺设机器人。
背景技术:
2.传统的建筑业通过人工去贴瓷砖,基本是手工操作,需要建筑工人有较高的经验。建筑工人的经验不同,施工中贴出的地板砖的质量也是不同的。随着生活水平的提高,施工人员日益短缺。地砖铺贴作为装修过程中的重要环节,市场容量大,因此出现了一些地砖铺设机器人。
3.但是,在发明人所知道的地砖铺设机器人中,地砖铺设装置包括竖向立柱、与竖向立柱连接的横向机械臂以及与横向机械臂连接的地砖抓取机构,横向机械臂只能相对于竖向立柱在竖直方向可移动地设置,地砖抓取机构的作业范围较窄,无法较为准确地控制地砖抓取机构相对于竖向立柱的转动角度,地砖抓取机构的控制精度较低。
技术实现要素:
4.本发明的主要目的在于提供一种地砖铺设装置及地砖铺设机器人,以解决现有技术中地砖抓取机构的控制精度较低的问题。
5.为了实现上述目的,根据本发明的一个方面,提供了一种地砖铺设装置,地砖铺设装置包括位置调整机构和设置在位置调整机构上的地砖抓取机构,位置调整机构包括:立柱组件;机械臂部件,与立柱组件连接,机械臂部件相对于立柱组件在第一方向上可移动地设置,以带动地砖抓取机构沿第一方向移动;以及回转部件,相对于机械臂部件在水平面内可转动地设置,地砖抓取机构与回转部件连接;其中,立柱组件在水平面内可转动地设置,以带动机械臂部件、回转部件和地砖抓取机构在水平面内转动;在回转部件的带动下,地砖抓取机构能够绕机械臂部件在水平面内转动。
6.位置调整机构用于调整地砖抓取机构的位置,回转部件与地砖抓取机构连接,地砖抓取机构随回转部件一起运动,回转部件能够相对于机械臂部件在水平面内转动,因此地砖抓取机构能够随回转部件相对于机械臂部件在水平面内转动;机械臂部件能够相对于立柱组件在第一方向上移动,地砖抓取机构和回转部件能够随机械臂部件一起在第一方向上移动。这样,相对于控制整个地砖铺设装置转动而言,由于回转部件和与回转部件连接的地砖抓取机构的整体重量较小,所以惯性小,可以比较准确控制地砖抓取机构的旋转精度,使得该地砖铺设装置的精度高。
7.进一步地,地砖抓取机构相对于回转部件在水平面内可转动地设置,回转部件包括第一臂体和设置在第一臂体上的移动座板,地砖铺设装置还包括驱动组件,驱动组件包括第一驱动结构,第一驱动结构的输出轴与移动座板连接,第一驱动结构的本体部与地砖抓取机构连接,以带动地砖抓取机构相对于移动座板可转动地设置。
8.第一驱动结构的输出轴与移动座板连接,第一驱动结构的本体部与地砖抓取机构
连接,以带动地砖抓取机构相对于移动座板可转动地设置。这样,即可使地砖抓取机构相对于移动座板转动,方便抓取和铺设地砖。
9.进一步地,驱动组件还包括:连接法兰,第一驱动结构的本体部设置在连接法兰上;连接框架,第一驱动结构的本体部位于连接框架内,连接法兰通过连接框架与地砖抓取机构连接。
10.第一驱动结构通过连接法兰带动连接框架相对于移动座板转动,从而带动地砖抓取机构相对于移动座板转动。
11.进一步地,地砖铺设装置还包括:调平机构,用于调整地砖抓取机构的水平度或者在竖直方向上的高度;倾角传感器,用于检测地砖抓取机构的倾角α;控制器,调平机构和倾角传感器均与控制器连接,控制器根据倾角传感器检测的倾角α控制调平机构的伸缩动作。
12.倾角传感器检测地砖抓取机构的倾角α,控制器根据检测的倾角α控制调平机构伸出或者缩回,从而对地砖抓取机构进行调平,使地砖抓取机构保持在水平状态,进而铺平地砖。
13.进一步地,地砖抓取机构包括振捣支架,调平机构包括设置在回转部件上的调平电缸,调平电缸的一端与振捣支架枢转连接。
14.连接框架与振捣支架枢转连接,调平电缸的一端与振捣支架枢转连接,这样,在调平电缸的作用下,振捣支架能够以连接框架与振捣支架的枢转点为中心发生摆动,振捣支架带动地砖抓取机构摆动从而对地砖抓取机构的水平度或者在竖直方向上的高度进行调整。
15.进一步地,地砖铺设装置还包括相对于回转部件可转动设置的驱动组件,驱动组件包括连接框架和与回转部件的至少部分连接的第一驱动结构,连接框架通过十字轴万向节与振捣支架枢转连接,调平电缸的另一端与连接框架枢转连接,调平电缸与连接框架之间的枢转点、连接框架与振捣支架的枢转点以及调平电缸的另一端与振捣支架的枢转点构成三角形结构。
16.第一驱动结构使连接框架能够相对于回转部件转动;调平电缸的一端与振捣支架枢转连接,调平电缸的另一端与连接框架枢转连接,使调平电缸的调平过程更加灵活,连接框架与振捣支架枢转连接,在调平电缸的作用下,振捣支架和地砖抓取机构能够以连接框架与振捣支架的枢转点为中心发生摆动,从而对地砖抓取机构调平;调平电缸的输出端始终保持在竖直方向上运动,从而对地砖抓取机构的水平度或者在竖直方向上的高度进行调整。
17.进一步地,调平机构还包括倾角调整板,调平电缸的另一端通过万向球头与倾角调整板连接,倾角调整板与连接框架连接;或者,调平电缸的伸缩量与倾角α之间满足如下关系:t=a*sinα,其中,a为十字轴万向节与振捣支架的枢转点以及调平电缸的推杆与振捣支架的枢转点之间的横向距离,α为地砖抓取机构的倾角。
18.通过控制器控制调平电缸的伸缩,即可对地砖抓取机构进行调平;根据检测的倾角α以及调平电缸的伸缩量与倾角α的关系式,可以得到在倾角为α时,调平电缸需要伸出或者缩回的长度,通过调平电缸伸出或者缩回,对地砖抓取机构调平,从而保证地砖铺平。
19.进一步地,机械臂部件包括第二臂体和设置在第二臂体上的第二驱动结构,第二驱动结构的输出轴与回转部件连接,以带动回转部件摆动;或者,位置调整机构包括丝杆传
动结构和设置在立柱组件上的驱动部,驱动部与丝杆传动结构驱动连接,丝杆传动结构包括:第一丝杆,相对于立柱组件可转动地设置;第一螺母,与第一丝杆螺纹配合,第一螺母与机械臂部件固定连接。
20.第二驱动结构驱动回转部件,使回转部件转动,从而实现了回转部件相对于机械臂部件可转动的功能。驱动部驱动第一丝杆,使第一丝杆转动,第一螺母与第一丝杆螺纹配合,将第一丝杆相对于立柱组件的转动运动转化为第一螺母相对于立柱组件的直线往复运动,第一螺母带动机械臂部件相对于立柱组件做直线往复运动,从而实现了机械臂部件相对于立柱组件在第一方向上可移动的功能。
21.进一步地,立柱组件包括底座部件和与底座部件连接的立柱结构,其中,立柱结构相对于底座部件可转动地设置,以带动机械臂部件、回转部件和地砖抓取机构相对于底座部件转动;或者,地砖抓取机构相对于回转部件在第二方向上可移动地设置;或者,地砖抓取机构包括振捣支架、设置在振捣支架上的吸盘以及设置在振捣支架上的振动机构,振动机构与吸盘连接。
22.立柱结构绕其自身的中心轴线相对于底座部件可转动,立柱结构带动机械臂部件、回转部件和地砖抓取机构相对于底座部件转动,可进一步增大地砖抓取机构的作业范围,提高地砖铺设装置的适应性。进一步地,立柱结构可相对于底座部件实现360度旋转:这样,整机可以实现全向旋转,可左右取料,避免墙壁阻挡影响取料的问题。地砖抓取机构相对于回转部件在第二方向上可移动,这样,增大了地砖抓取机构在第二方向上的作业面积,从而能够进一步增大地砖抓取机构的作业范围,提高地砖铺设装置的适应性。振捣支架与连接框架枢转连接,振捣支架与调平电缸枢转连接,从而使连接框架和调平电缸均与吸盘活动连接,在振动机构的带动下,吸盘振动,带动吸盘吸附的地砖振动,使待铺设地砖的部位能够与地砖更好地贴合。
23.根据本发明的另一方面,提供了一种地砖铺设机器人,地砖铺设机器人包括上述的地砖铺设装置和与地砖铺设装置连接的行走机构。
24.地砖铺设机器人能够抓取、调平和铺设地砖。
25.应用本发明的技术方案,位置调整机构用于调整地砖抓取机构的位置,回转部件与地砖抓取机构连接,地砖抓取机构随回转部件一起运动,回转部件能够相对于机械臂部件转动,因此地砖抓取机构能够随回转部件相对于机械臂部件转动;机械臂部件能够相对于立柱组件在第一方向上移动,地砖抓取机构和回转部件能够随机械臂部件一起在第一方向上移动。这样,相对于控制整个地砖铺设装置转动而言,由于回转部件和与回转部件连接的地砖抓取机构的整体重量较小,所以惯性小,可以比较准确的控制地砖抓取机构的旋转精度,使得该地砖铺设装置的精度高。
附图说明
26.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
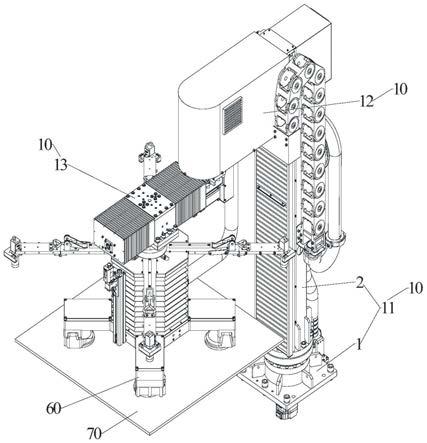
27.图1示出了根据本发明的地砖铺设装置的实施例的立体结构示意图;
28.图2示出了图1的地砖铺设装置的剖视图;
29.图3示出了图2的地砖铺设装置的局部放大图;
30.图4示出了图1的地砖铺设装置的折叠板处于展开位置的示意图;
31.图5示出了图1的地砖铺设装置的折叠板处于收回位置的示意图;
32.图6a示出了图1的地砖铺设装置的地砖抓取机构处于水平状态的结构示意图;
33.图6b示出了根据图6a的地砖抓取机构处于水平状态下的万向球头、连接框架与振捣支架的枢转点以及调平电缸的另一端与振捣支架的枢转点之间的关系图;
34.图7a示出了图1的地砖铺设装置的地砖抓取机构处于倾斜状态的结构示意图;
35.图7b示出了根据图7a的地砖抓取机构处于倾斜状态下的万向球头、连接框架与振捣支架的枢转点以及调平电缸的另一端与振捣支架的枢转点之间的关系图;
36.图8示出了图1的地砖铺设装置的视觉相机的工作状态的结构示意图;
37.图9示出了图1的地砖铺设装置的地砖抓取机构的结构示意图;以及
38.图10示出了图1的地砖铺设装置的十字轴的结构示意图。
39.其中,上述附图包括以下附图标记:
40.10、位置调整机构;11、立柱组件;1、底座部件;101、底座;102、第一电机;103、第一减速机;104、回转法兰;2、立柱结构;201、回转立柱;202、第一丝杆浮动端轴承座;203、第一丝杆;204、第一直线导轨;205、第一导轨滑块;206、第一螺母;207、第一丝杆螺母固定座;208、第二电机;209、第一同步轮;210、第一同步带;211、第二同步轮;212、第一丝杆固定端轴承座;213、丝杆传动结构;12、机械臂部件;301、第二臂体;302、第三电机;303、第一减速机法兰;304、第二减速机;305、连接板;306、第二驱动结构;13、回转部件;401、第四电机;402、第三同步轮;403、第二同步带;404、第四同步轮;405、第二丝杆固定端轴承座;406、第一臂体;407、第二丝杆;408、第二丝杆螺母固定座;409、第二螺母;410、第二导轨滑块;411、第二直线导轨;412、第二丝杆浮动端轴承座;413、移动座板;501、rv减速机;502、连接法兰;503、旋转电机;504、连接框架;514、倾角调整板;517、下轴承座;518、十字轴;519、上轴承座;520、调平电缸;521、浮动接头;522、倾角传感器;20、调平机构;60、地砖抓取机构;61、振捣支架;601、吸盘;603、振捣机壳;604、偏心电机;605、机壳盖板;523、支架板;526、折叠板;527、视觉相机;528、铰链;70、地砖;80、瓷砖胶。
具体实施方式
41.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
42.需要指出的是,除非另有指明,本技术使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
43.在本发明中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的,或者是针对部件本身在竖直、垂直或重力方向上而言的;同样地,为便于理解和描述,“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本发明。
44.需要说明的是,本发明的实施例属于建筑装修领域,具体涉及一种能够抓取、调平和铺设地砖的地砖铺设装置及地砖铺设机器人。
45.本发明及本发明的实施例中,第一方向指的是竖直方向,即图2和图3中的z轴方向。水平面指的是与竖直方向垂直的平面,也是图4中的x方向和y方向限定的平面。第二方
向指的是图2中的x轴方向。
46.如图1所示,本发明的实施例中,地砖铺设装置包括位置调整机构10和设置在位置调整机构10上的地砖抓取机构60。位置调整机构10包括立柱组件11、机械臂部件12和回转部件13,机械臂部件12与立柱组件11连接,机械臂部件12相对于立柱组件11在第一方向上可移动地设置,以带动地砖抓取机构60沿第一方向移动,回转部件13相对于机械臂部件12在水平面内可转动地设置,地砖抓取机构60与回转部件13连接;其中,立柱组件11在水平面内可转动地设置,以带动机械臂部件12、回转部件13和地砖抓取机构60在水平面内转动;在回转部件13的带动下,地砖抓取机构60能够绕机械臂部件12在水平面内转动。
47.上述设置中,位置调整机构10用于调整地砖抓取机构60的位置,回转部件13与地砖抓取机构60连接,地砖抓取机构60随回转部件13一起运动,回转部件13能够相对于机械臂部件12转动,因此地砖抓取机构60能够随回转部件13相对于机械臂部件12转动;机械臂部件12能够相对于立柱组件11在第一方向上移动,地砖抓取机构60和回转部件13能够随机械臂部件12一起在第一方向上移动。这样,相对于控制整个地砖铺设装置转动而言,由于回转部件13和与回转部件13连接的地砖抓取机构60的整体重量较小,所以惯性小,可以比较准确的控制地砖抓取机构60的旋转精度,使得该地砖铺设装置的精度高。
48.利用800mmx800mm规格地砖铺贴房屋地面在装修工程中较为常见,现有技术中铺设地砖大多数是人工作业,由于地砖面积大,重量重,工人长期铺贴地砖过程中,会造成腰椎及膝关节损伤,同时还存在人工劳动强度大、作业不规范造成的质量问题等不足;为了克服现有技术的不足,提高地砖铺贴效率和质量,减轻工人的劳动强度,本发明及本发明的实施例提供一种能抓取、调平、铺设地砖的地砖铺设装置,该地砖铺设装置能够代替人工完成地砖的铺设工作,避免因人工作业不规范造成的质量问题,同时能够降低工人的劳动强度。
49.需要说明的是,本发明的实施例的地砖铺设装置能够实现对800mmx800mm规格地砖的抓取、调平和铺设工作。目前使用地砖铺设装置代替人工作业的工作场景很常见,但是要适合800mmx800mm规格地砖铺贴场景的工业机械臂很少,800mmx800mm规格地砖自身重量是18kg,抓取地砖的振捣吸盘重量15公斤,地砖在铺贴下压过程中,所需要的下压力为1000n,对地砖铺设装置的负载要求在100kg左右,而目前能达到上述负载要求的地砖铺设装置的整机重量在800kg左右,不符合住宅楼宇的楼板承载重量要求。基于上述原因,本发明及本发明的实施例提供了一种重量轻、高精度、高负载的适合地砖铺贴的地砖铺设装置。
50.如图1所示,本发明的实施例中,立柱组件11包括底座部件1和与底座部件1连接的立柱结构2,立柱结构2相对于底座部件1在水平面内可转动地设置,以带动机械臂部件12、回转部件13和地砖抓取机构60相对于底座部件1转动。立柱结构2带动机械臂部件12、回转部件13和地砖抓取机构60相对于底座部件转动,可进一步增大地砖抓取机构60的作业范围,提高地砖铺设装置的适应性。进一步地,立柱结构2可相对于底座部件1实现360度旋转:这样,整机可以实现全向旋转,可左右取料,避免墙壁阻挡影响取料的问题。
51.具体地,如图2所示,底座部件1包括底座101、第一电机102、第一减速机103和回转法兰104。第一电机102和第一减速机103均固定在底座101上,第一电机102的动力输出轴与第一减速机103的输入端相连接;回转法兰104固定在第一减速机103的输出轴上。第一电机102转动时,带动第一减速机103的输出端转动,与第一减速机103的输出端相连接的回转法兰104发生转动。
52.优选地,第一减速机103可以为rv减速机。
53.优选地,第一电机102可以为伺服电机。
54.如图2所示,本发明的实施例中,位置调整机构10包括丝杆传动结构213和设置在立柱组件11上的驱动部,驱动部与丝杆传动结构213驱动连接,丝杆传动结构213包括第一丝杆203和第一螺母206,第一丝杆203相对于立柱组件11可转动地设置;第一螺母206与第一丝杆203螺纹配合,第一螺母206与机械臂部件12固定连接,这样,即可将第一螺母与第一丝杆203的旋转运动转化为第一螺母206和机械臂部件12的直线运动。
55.上述设置中,驱动部驱动第一丝杆203,使第一丝杆203转动,第一螺母206与第一丝杆203螺纹配合,将第一丝杆203相对于立柱组件11的转动运动转化为第一螺母206相对于立柱组件11的直线往复运动,第一螺母206带动机械臂部件12相对于立柱组件11做直线往复运动,从而实现了机械臂部件12相对于立柱组件11在第一方向上可移动的功能。具体地,第一螺母206通过第一丝杆螺母固定座207与机械臂部件12连接。
56.如图2所示,本发明的实施例中,立柱结构2包括回转立柱201。回转立柱201固定在回转法兰104上并随回转法兰104转动,从而使立柱结构2相对于底座部件1可转动。
57.如图2所示,具体地,驱动部包括固定在回转立柱201上的第二电机208、安装在第二电机208的输出轴上的第一同步轮209、第一同步带210和第二同步轮211。第二同步轮211安装在第一丝杆203上,第一同步轮209和第二同步轮211通过第一同步带210连接。第一同步轮209跟随第二电机208的输出轴转动时,通过第一同步带210带动第二同步轮211转动,第一丝杆203随第二同步轮211发生转动,第一丝杆203驱动第一螺母206和第一丝杆螺母固定座207产生直线运动。
58.如图2所示,立柱结构2还包括第一丝杆浮动端轴承座202和第一丝杆固定端轴承座212。第一丝杆浮动端轴承座202和第一丝杆固定端轴承座212固定在回转立柱201的两端面上;第一丝杆浮动端轴承座202和第一丝杆固定端轴承座212安装在第一丝杆203的两端。第一螺母206安装在第一丝杆203上;第一丝杆螺母固定座207固定在第一螺母206上。
59.如图2所示,地砖铺设装置还包括导向机构。导向结构包括第一直线导轨204和第一导轨滑块205。其中,第一直线导轨204安装在回转立柱201上,第一导轨滑块205安装在第一直线导轨204上且能够沿第一直线导轨204做直线运动。这样,可以确保机械臂部件12相对于立柱结构2的直线运动更顺畅。
60.优选地,第一丝杆203可以为滚珠丝杆。
61.优选地,第二电机208可以为伺服电机。
62.如图2所示,本发明的实施例中,机械臂部件12包括第二臂体301和设置在第二臂体301上的第二驱动结构306,第二驱动结构306的输出轴与回转部件13连接,以带动回转部件13摆动。
63.上述设置中,第二驱动结构306驱动回转部件13,使回转部件13转动,从而实现了回转部件13相对于机械臂部件12可转动的功能。
64.优选地,第二驱动结构306包括第三电机302和与第三电机302连接的第二减速机304,第二减速机304的动力输出端与回转部件13连接,在第三电机302的驱动下,第二减速机304带动回转部件13转动。
65.具体地,如图2所示,机械臂部件12包括第二臂体301、第三电机302、第一减速机法
兰303、第二减速机304和连接板305。
66.第二臂体301安装固定在第一导轨滑块205上,并与第一丝杆螺母固定座207相连接,在第一丝杆螺母固定座207的带动下,第二臂体301随第一丝杆螺母固定座207作直线运动并沿第一直线导轨204滑动,从而使机械臂部件12相对于立柱组件11在第一方向上可移动。第三电机302通过第一减速机法兰303与第二减速机304相连;第二减速机304安装固定在第二臂体301上。连接板305安装固定在第二减速机304的输出轴上。第三电机302的输出轴转动时,驱动第二减速机304的输入轴转动,在第二减速机304的输出轴的带动下,连接板305发生转动。
67.优选地,第三电机302可以为伺服电机。
68.如图2所示,本发明的实施例中,地砖抓取机构60相对于回转部件13在水平面内可转动地设置,回转部件13包括第一臂体406和设置在第一臂体406上的移动座板413。地砖铺设装置还包括驱动组件,驱动组件包括第一驱动结构,第一驱动结构的输出轴与移动座板413连接,第一驱动结构的本体部与地砖抓取机构60连接,以带动地砖抓取机构60相对于移动座板413可转动地设置。
69.上述设置中,第一驱动结构的输出轴与移动座板413连接,第一驱动结构的本体部与地砖抓取机构60连接,以带动地砖抓取机构60相对于移动座板可转动地设置。这样,即可使地砖抓取机构60相对于移动座板转动,方便抓取和铺设地砖。
70.具体地,第一驱动结构的输出轴与移动座板413连接,第一驱动结构与移动座板413可发生相对转动,从而使移动座板413相对于驱动组件可转动,由于移动座板413设置在第一臂体406上,移动座板413相对于第一臂体406不能发生相对转动,因此,第一驱动结构的驱动力作用在自身,使第一驱动结构相对于移动座板413转动,从而带动振捣支架61和与振捣支架61连接的地砖抓取机构60相对于移动座板413转动,从而实现了地砖抓取机构60相对于回转部件13可转动的功能;地砖抓取机构60能够相对于回转部件13转动,使地砖抓取机构60抓取的地砖能够相对于回转部件13转动,当地砖的安装位置固定之后,也就是说回转部件13的位置固定之后,通过调整地砖抓取机构60能够使地砖更准确地安装到相应的安装位置,使地砖安装更精确。
71.如图2和图3所示,本发明的实施例中,驱动组件还包括连接法兰502和连接框架504,第一驱动结构的本体部设置在连接法兰502上,第一驱动结构的本体部位于连接框架504内,连接法兰502通过连接框架504与地砖抓取机构60连接。
72.上述设置中,第一驱动结构通过连接法兰502带动连接框架504相对于移动座板413转动,从而带动地砖抓取机构60相对于移动座板413转动。
73.如图3所示,本发明的实施例中,优选地,第一驱动结构包括rv减速机501和旋转电机503。其中,减速机的输出轴与移动座板413连接,旋转电机503通过连接法兰502安装在减速机的外壳上,连接框架与连接法兰连接。由于移动座板不能转动(即减速机的输出轴是固定的),减速机的外壳、与减速机连接的旋转电机503以及连接框架等部件构成的整体结构相对于移动座板可转动地设置,从而带动与连接框架连接的地砖抓取机构相对于移动座板转动,即地砖抓取机构60能够绕图3所示的z轴转动一定角度。其中,旋转电机503的外壳形成上述的本体部。
74.当然,在附图未示出的替代实施例中,还可以这样设置,第一驱动结构不包括rv减
速机501,只包括旋转电机503,旋转电机503的输出轴与移动座板连接,旋转电机503的外壳通过连接框架与振捣支架连接。进一步地,调平电缸520的输出轴通过倾角调整板514与旋转电机503的外壳连接。
75.优选地,驱动组件还包括十字轴万向节,十字轴万向节设置在连接框架504和地砖抓取机构60的振捣支架61之间,振捣支架61通过十字轴万向节与连接框架504枢转连接。上述设置中,连接框架504通过十字轴万向节与振捣支架61连接,从而能够带动振捣支架61相对于移动座板413转动;振捣支架61与连接框架504枢转连接,使振捣支架61与连接框架504的相对位置更加灵活,方便对振捣支架61的位置作调整。
76.具体地,如图3所示,十字轴万向节包括十字轴518和分别位于十字轴518两侧的上轴承座519和下轴承座517。十字轴518的具体结构如图10所示,这样,可以使与十字轴518连接的上轴承座519和下轴承座517均能够围绕x轴、y轴为旋转中心轴转动。
77.如图2所示,本发明的实施例中,地砖抓取机构60相对于回转部件13在第二方向上可移动地设置。
78.上述设置中,地砖抓取机构60相对于回转部件13在第二方向上可移动,这样,增大了地砖抓取机构60在第二方向上的作业面积,从而能够进一步增大地砖抓取机构60的作业范围,提高地砖铺设装置的适应性。
79.具体地,如图2所示,回转部件13包括第四电机401、第三同步轮402、第二同步带403、第四同步轮404、第二丝杆固定端轴承座405、第一臂体406、第二丝杆407、第二丝杆螺母固定座408、第二螺母409、第二导轨滑块410、第二直线导轨411、第二丝杆浮动端轴承座412和移动座板413。第一臂体406固定在连接板305上,并会跟随连接板305发生转动,从而使回转部件13相对于机械臂部件12可转动。第二丝杆固定端轴承座405和第二丝杆浮动端轴承座412安装固定在第一臂体406的两端,第二丝杆固定端轴承座405和第二丝杆浮动端轴承座412设置在第二丝杆407的两端;第四电机401固定在第一臂体406上,第三同步轮402安装在第四电机401的输出轴上,第四同步轮404安装在第二丝杆407的轴端,第三同步轮402和第四同步轮404通过第二同步带403连接;第二螺母409与第二丝杆407配合安装,第二丝杆螺母固定座408安装固定在第二螺母409上。第二直线导轨411安装固定在第一臂体406上,第二导轨滑块410配合安装在第二直线导轨411上。移动座板413安装固定在第二导轨滑块410上,并与第二丝杆螺母固定座408相连接。第四电机401的输出轴带动第三同步轮402发生转动时,通过第二同步带403带动第四同步轮404发生转动,第二丝杆407也跟随第四同步轮404发生转动,第二螺母409与第二丝杆407螺纹配合,第二丝杆407的转动运动转化为第二螺母409的直线运动,第二螺母409做直线运动,移动座板413通过第二丝杆螺母固定座408与第二螺母409相连接,在第二螺母409的带动下,移动座板413随第二螺母409做直线运动并沿第二直线导轨411滑动,移动座板413带动地砖抓取机构60运动,从而使地砖抓取机构60相对于回转部件13在第二方向上可移动。
80.优选地,第四电机401可以为伺服电机。
81.优选地,第二丝杆407可以为滚珠丝杆。
82.如图3和图4所示,本发明的实施例中,地砖铺设装置还包括调平机构20、倾角传感器522和控制器,调平机构20用于调整地砖抓取机构60的水平度或者在竖直方向上的高度;倾角传感器522用于检测地砖抓取机构60的倾角α,调平机构20和倾角传感器522均与控制
器连接,控制器根据倾角传感器522检测的倾角α控制调平机构20的伸缩动作。
83.上述设置中,倾角传感器522检测地砖抓取机构60的倾角α,控制器根据检测的倾角α控制调平机构20伸出或者缩回,从而对地砖抓取机构60进行调平,使地砖抓取机构60保持在水平状态,进而铺平地砖。
84.如图2至图7b所示,本发明的实施例中,地砖抓取机构60包括振捣支架61,调平机构20包括设置在回转部件13上的调平电缸520,调平电缸520的一端与振捣支架61枢转连接,以使振捣支架61可摆动地设置。
85.上述设置中,连接框架504与振捣支架61枢转连接,调平电缸520的一端与振捣支架61枢转连接,这样,在调平电缸520的作用下,振捣支架61能够以连接框架504与振捣支架61的枢转点为中心发生摆动,振捣支架61带动地砖抓取机构60摆动从而对地砖抓取机构60的水平度或者在竖直方向上的高度进行调整。
86.调平机构20用于调整地砖抓取机构60的水平度或者在竖直方向上的高度。优选地,调平电缸520的数量为两个,如图4所示,其中一个调平电缸520与驱动组件沿y轴方向左右布置,另外一个调平电缸520与驱动组件沿x轴方向前后布置。两个调平电缸520是独立设置的。这样,在x轴方向上和y轴方向上分别设置一个调平电缸520,通过独立控制两个调平电缸520的伸缩量,可以分别在x轴方向上或者y轴方向上对地砖抓取机构60进行调平。
87.如图2和图3、图6a至图7b所示,本发明的实施例中,地砖铺设装置还包括万向球头和相对于回转部件13可转动设置的驱动组件,驱动组件包括连接框架504和与回转部件13的至少部分连接的第一驱动结构,连接框架504通过十字轴万向节与振捣支架61枢转连接,调平电缸520的另一端通过万向球头与连接框架504枢转连接,万向球头、连接框架504与振捣支架61的枢转点以及调平电缸520的另一端与振捣支架61的枢转点构成三角形结构。
88.上述设置中,第一驱动结构使连接框架504能够相对于回转部件13转动;调平电缸520的一端与振捣支架61枢转连接,调平电缸520的另一端与连接框架504枢转连接,使调平电缸520的调平过程更加灵活,连接框架504与振捣支架61枢转连接,在调平电缸520的作用下,振捣支架61和地砖抓取机构60能够以连接框架504与振捣支架61的枢转点为中心发生摆动,从而对地砖抓取机构60调平;调平电缸520的输出端始终保持在竖直方向上运动,从而对地砖抓取机构60的水平度或者在竖直方向上的高度进行调整。
89.如图3所示,本发明的实施例中,由于驱动组件的第一驱动结构中设置了减速机,调平电缸520的推杆是通过倾角调整板安装在连接法兰或者减速机的外壳上,调平电缸520的固定端也是通过十字轴万向节与振捣支架61连接的。这样,通过控制器控制调平电缸520的伸缩,即可对地砖抓取机构60进行调平。
90.当然,在附图未示出的替代实施例中,调平电缸520的固定端也可以通过万向球头与振捣支架连接。或者,也可以使调平电缸520的推出杆所在的驱动端与振捣支架连接,而调平电缸的与驱动端相对的固定端则与倾角调整板连接。
91.优选地,调平电缸520的伸缩量与倾角α之间满足如下关系:t=a*sinα,其中,a为十字轴万向节与振捣支架61的枢转点以及调平电缸520的固定端与振捣支架61的枢转点之间的横向距离,α为地砖抓取机构60的倾角。
92.根据检测的倾角α以及调平电缸520的伸缩量与倾角α的关系式,可以得到在倾角为α时,调平电缸520需要伸出或者缩回的长度,通过调平电缸520伸出或者缩回,对地砖抓
取机构60调平,从而保证地砖70铺平。
93.优选地,调平电缸520为直线电缸。
94.具体地,调平机构20可实现绝对水平调平功能。倾角调整板514安装固定在rv减速机501上;浮动接头521安装固定倾角调整板514上;调平电缸520通过浮动接头521连接在倾角调整板514上。十字轴518把上轴承座519和下轴承座517连接在一起;上轴承座519安装固定在调平电缸520上;下轴承座517安装固定在振捣支架61上。当调平电缸520的输出杆做直线运动时,振捣支架61以旋转中心q点做旋转运动,倾角为α
°
;倾角传感器522安装固定在振捣支架61上,倾角传感器522测量出倾角α
°
;如图6所示。调平电缸520输出杆运动距离为t,且t=c1-c2,万向球头所在点为s,万向球头所在点s和旋转中心q的距离为b,位置变化点p和旋转中心q的距离为a,且a固定不变。根据三角形几何关系,那么得出调平电缸520输出杆运动距离t≈a
·
sinα。当被地砖抓取机构60吸附的地砖发生倾斜时,振捣支架61上的倾角传感器522检测出倾斜角度α
°
,根据t≈a
·
sinα函数关系式,计算出调平电缸520输出杆运动距离t,实现地砖绝对水平的调平。
95.如图2和图3、图6a至图7b所示,本发明的实施例中,地砖铺设装置还包括十字轴万向节。十字轴万向节包括十字轴和位于十字轴两侧的两个轴承座(包括上轴承座和下轴承座),调平电缸520的固定端与两个轴承座中的一个连接,振捣支架61与两个轴承座中的另一个连接。
96.上述设置中,调平电缸520的固定端通过十字轴万向节与振捣支架61枢转连接,使振捣支架61的摆动更加灵活,同时,能够保证调平电缸520的推杆始终保持在竖直方向上运动,以对地砖抓取机构60的水平度或者在竖直方向上的高度进行调整,保证调整的准确性。
97.如图8所示,本发明的实施例中,地砖铺设装置还包括设置在连接法兰502上的多个支架板523,多个支架板523沿周向间隔布置。每个支架板523上都设有视觉机构。利用视觉机构,可以找到地砖70铺设的准确位置。
98.优选地,视觉机构包括视觉相机527。
99.如图4和图5所示,地砖铺设装置还包括设置在支架板523上的折叠板526和位于折叠板526的远离支架板523一端的视觉相机527,折叠板526相对于支架板523可折叠地设置,折叠板526具有展开位置和收回位置。
100.其中,折叠板526与支架板523铰接连接。优选地,可通过铰链528将支架板523和折叠板526连接起来。
101.如图4所示,折叠板526处于展开位置,此时,可利用视视觉机构提供准确的位置信息。如图5所示,折叠板526处于收回位置,视觉机构也跟着处于收回位置。这样,整个地砖铺设装置占用空间较小,方便收纳。
102.如图9所示,本发明的实施例中,地砖抓取机构60还包括设置多个吸盘601以及设置在振捣支架61上的与多个吸盘601对应设置的振动机构。上述设置中,振捣支架61与连接框架504枢转连接,振捣支架61与调平电缸520枢转连接,从而使连接框架504和调平电缸520均与吸盘601活动连接,在振动机构的带动下,吸盘601振动,带动吸盘601吸附的地砖振动,使待铺设地砖的部位能够与地砖更好地贴合。
103.如图9所示,每个振动机构都包括机壳和位于机壳(机壳包括振捣机壳603和机壳盖板605)内并与机壳连接的偏心电机604,吸盘与机壳连接。当偏心电机604转动时,产生振
动,这样,偏心电机604连接的机壳和吸盘601也产生振动,吸盘601吸附住的地砖发生振动,地砖下面的流质体瓷砖胶80受振动后流动性更好,更容易填充满地砖下面空隙处,从而能够保证地砖铺设质量。
104.优选地,吸盘601为橡胶吸盘。
105.本发明的实施例的地砖铺设装置具有以下优点:
106.1、高负载:整机采用丝杆传动结构做动力传输,采用直线导轨做运动导向,使此地砖铺设装置具有高负载的特性;
107.2、重量轻:整机主体结构采用碳钢薄壁管材结合强筋焊接而成,主体结构具有重量轻,刚性好等特性;
108.3、高精度:采用小半径回转运动和直线运动配合,运动精度高;
109.4、全向旋转:整机可以实现全向旋转,可左右取料,避免墙壁阻挡影响取料的问题;
110.5、绝对水平调平:采用倾角传感器和调平机构20配合测量控制地砖抓取机构,可对地砖实现绝对水平调整;
111.6、采用视觉相机进行测量,能够找到地砖铺设的准确位置;
112.7、采用振动机构和吸盘对地砖下面的瓷砖胶进行振动,使瓷砖胶填充满地砖下面空隙,实现地砖无空鼓铺设。
113.本发明及本发明的实施例还提供了一种地砖铺设机器人,地砖铺设机器人包括上述的地砖铺设装置和与上述的地砖铺设装置连接的行走机构。行走机构能够实现行走功能,带动地砖铺设装置移动,使地砖铺设机器人可以在不同工作位置工作。
114.另外,由于本技术的地砖铺设机器人具有本技术的地砖铺设装置,因此,本技术的地砖铺设机器人也具有本技术的地砖铺设装置的上述优点,此处不再赘述。
115.从以上的描述中,可以看出,本发明上述的实施例实现了如下技术效果:位置调整机构用于调整地砖抓取机构的位置,回转部件与地砖抓取机构连接,地砖抓取机构随回转部件一起运动,回转部件能够相对于机械臂部件转动,因此地砖抓取机构能够随回转部件相对于机械臂部件转动;机械臂部件能够相对于立柱组件在第一方向上移动,地砖抓取机构和回转部件能够随机械臂部件一起在第一方向上移动。这样,相对于控制整个地砖铺设装置转动而言,由于回转部件和与回转部件连接的地砖抓取机构的整体重量较小,所以惯性小,可以比较准确的控制地砖抓取机构的旋转精度,使得该地砖铺设装置的精度高。
116.显然,上述所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
117.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、工作、器件、组件和/或它们的组合。
118.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示
或描述的那些以外的顺序实施。
119.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。