1.本公开的各个方面大体上涉及光学元件的子孔径抛光,具体地但非排他地涉及光学元件的超声子孔径抛光。
背景技术:
2.头戴式显示器(hmd)是通常穿戴在用户的头部上的显示器设备。hmd可以被用于各种应用,诸如游戏、航空、工程、医学、娱乐等,以向用户提供人工现实内容。人工现实是一种在呈现给用户之前已经以某种方式调整的现实形式,其可以包括例如虚拟现实(vr)、增强现实(ar)、混合现实(mr)、混合现实或其某种组合和/或衍生物。
3.hmd中所包括的各种光学元件(诸如透镜、偏振器、波片等)的准确性可能取决于特定应用。例如,一些hmd可能包含眼睛追踪系统,该眼睛追踪系统包括追踪用户的眼睛移动的集成相机。因此,随着眼睛追踪系统的要求和准确性的提高,制造由眼睛追踪系统使用的各种光学元件所需的准确性也提高。
技术实现要素:
4.根据本发明的第一方面,提供了一种用于抛光光学元件的超声抛光系统,该系统包括:超声致动器,被配置为生成超声振动;以及抛光臂,被耦合至超声致动器,其中抛光臂包括:喇叭,具有被耦合以接收超声振动的近端,其中喇叭被配置为将超声振动从近端传播到喇叭的远端;以及抛光球,被附接至喇叭的远端,其中抛光球被配置为响应于超声振动而振动来抛光光学元件的表面,并且其中抛光球被配置为在光学元件的表面上提供小于光学元件的孔径的抛光区域。
5.在一些实施例中,光学元件的孔径是3毫米或更小。
6.在一些实施例中,抛光区域具有的直径为10微米或更小。
7.在一些实施例中,抛光球具有球形形状。
8.在一些实施例中,抛光球包括蓝宝石。
9.在一些实施例中,抛光臂具有的自然频率与超声振动的频率相匹配。
10.在一些实施例中,超声振动的频率大于或等于20khz。
11.在一些实施例中,超声振动的频率在20khz与40khz之间。
12.在一些实施例中,超声抛光系统还包括:计算机数控(cnc)定位器,被耦合至抛光臂以改变抛光球相对于光学元件的表面的位置。
13.在一些实施例中,超声抛光系统还包括:计算设备,计算设备包括:至少一个处理器;以及耦合至该至少一个处理器的至少一个存储器,该至少一个存储器在其中存储有指令,该指令在由至少一个处理器执行时引导计算设备:生成一个或多个控制信号,以引导cnc定位器改变抛光球相对于光学元件的表面的位置。
14.在一些实施例中,用于生成一个或多个控制信号以引导cnc定位器改变抛光球的位置的指令包括:用于在光学元件的表面上沿着抛光路径引导抛光球的指令。
15.在一些实施例中,用于沿着抛光路径引导抛光球的指令包括用于改变(a)被施加到抛光臂的负载,或者(b)抛光球沿着抛光路径的速度中的至少一项,以在沿着抛光路径的一个或多个位置处调整从光学元件的表面被移除的材料量的指令。
16.在一些实施例中,超声抛光系统还包括:干涉仪,被设置为获得光学元件的一个或多个表面测量值,其中至少一个存储器还包括:用于引导计算设备基于表面测量值来生成光学元件的表面误差图的指令,并且其中用于改变负载或速度的指令响应于表面误差图。
17.在一些实施例中,超声致动器包括磁致伸缩致动器,并且其中抛光球被配置为响应于由磁致伸缩致动器生成的超声振动而在光学元件的表面上沿着椭圆行程路径振动。
18.在一些实施例中,超声致动器包括压电致动器,并且其中抛光球被配置为响应于由压电致动器生成的超声振动而在光学元件的表面上沿着直线行程路径振动。
19.根据本发明的第二方面,提供了一种光学元件的超声子孔径抛光的方法,该方法包括:使超声致动器能够生成超声振动;以及生成一个或多个控制信号,以引导计算机数控(cnc)定位器改变抛光臂相对于光学元件的表面的位置,其中抛光臂包括:喇叭,具有被耦合以接收由超声致动器生成的超声振动的近端,其中喇叭被配置为将超声振动从近端传播到喇叭的远端;以及抛光球,被附接至喇叭的远端,其中抛光球被配置为响应于超声振动而振动来抛光光学元件的表面,并且其中抛光球被配置为在光学元件的表面上提供小于光学元件的孔径的抛光区域。
20.在一些实施例中,改变抛光球的位置包括在光学元件的表面上沿着抛光路径引导抛光球,该方法还包括:生成一个或多个附加控制信号,以引导cnc定位器改变(a)被施加到抛光臂的负载,或者(b)抛光球沿着抛光路径的速度中的至少一项,以在沿着抛光路径的一个或多个位置处调整从光学元件的表面移除的材料量。
21.在一些实施例中,该方法还包括:接收光学元件的一个或多个表面测量值;以及基于表面测量值来生成光学元件的表面误差图,其中改变负载或速度响应于表面误差图。
22.根据本发明的第三方面,提供了一种由方法抛光的光学元件,该方法包括:使超声致动器能够生成超声振动;以及生成一个或多个控制信号,以引导计算机数控(cnc)定位器改变抛光臂相对于光学元件的表面的位置,其中抛光臂包括:喇叭,具有被耦合以接收由超声致动器生成的超声振动的近端,其中喇叭被配置为将超声振动从近端传播到喇叭的远端;以及抛光球,被附接至喇叭的远端,其中抛光球被配置为响应于超声振动而振动来抛光光学元件的表面,并且其中抛光球被配置为在光学元件的表面上提供小于光学元件的孔径的抛光区域。
23.在一些实施例中,该方法还包括:接收光学元件的一个或多个表面测量值;基于表面测量值来生成光学元件的表面误差图;响应于表面误差图来生成一个或多个附加控制信号,以引导cnc定位器改变(a)被施加到抛光臂的负载,或者(b)抛光球沿着抛光路径的速度中的至少一项,以在沿着抛光路径的抛光臂的一个或多个位置处调整从光学元件的表面移除的材料量。
24.应当理解,本文描述为适合于并入本发明的一个方面或实施例的任何特征旨在在本公开的所有方面和实施例上可概括。
附图说明
25.本公开的非限制性和非穷举性方面参照以下附图描述,其中除非另有指定,否则在各个视图中,相同的附图标记指代相同的部分。
26.图1图示了根据本公开的各个方面的头戴式显示器(hmd)。
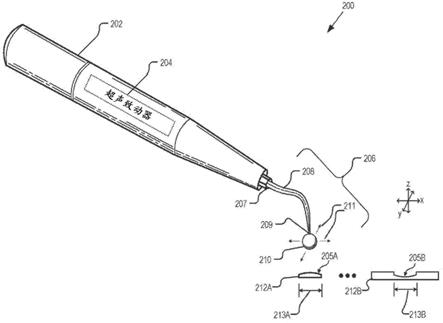
27.图2图示了根据本公开的各个方面的示例超声抛光系统。
28.图3图示了根据本公开的各个方面的另一示例超声抛光系统。
29.图4图示了根据本公开的各个方面的抛光球的抛光路径。
30.图5a至图5c图示了根据本公开的各个方面的抛光球的各种行程路径、接触区域和对应抛光区域。
31.图6图示了根据本公开的各个方面的用于与超声抛光系统一起使用的示例计算设备。
32.图7是图示了根据本公开的各个方面的用于光学元件的超声子孔径抛光的示例过程的流程图。
具体实施方式
33.在以下描述和相关附图中公开了各个方面和实施例,以示出与光学元件的超声子孔径抛光相关的具体示例。在阅读本公开时,替代的方面和实施例对于相关领域的技术人员将是明显的,并且可以在不脱离权利要求的范围的情况下构造和实践。附加地,众所周知的元素将不再详细描述,或可以被省略以免混淆本文公开的各个方面和实施例的相关细节。
34.图1图示了根据本公开的各个方面的hmd 100。hmd 100的所图示的示例被示出为包括查看结构140、顶部稳固结构141、侧部稳固结构142、后部稳固结构143和前部刚性体144。在一些示例中,hmd 100被配置为穿戴在hmd 100的用户的头部上,其中顶部稳固结构141、侧面稳固结构142和/或后部稳固结构143可以包括织物带,该织物带包括弹性结构以及一个或多个刚性结构(例如塑料),以将hmd 100稳固到用户的头部。hmd 100还可以可选地包括一个或多个耳机120,以将音频递送给hmd 100的用户的(多个)耳朵。
35.hmd 100的所图示的示例还包括用于接触hmd 100的用户的面部的界面膜118,其中界面膜118用于阻挡至少一些环境光到达hmd100的用户的眼睛。
36.示例hmd 100还可以包括用于支撑hmd 100的查看结构140的硬件的底盘(图1中未明确图示的底盘和硬件)。查看结构140的硬件可以包括处理逻辑、用于发送和接收数据的有线和/或无线数据接口、图形处理器以及用于存储数据和计算机可执行指令的一个或多个存储器中的任何一个存储器。在一个示例中,查看结构140可以被配置为接收有线电源和/或可以被配置为由一个或多个电池供电。另外,查看结构140可以被配置为接收包括视频数据的有线和/或无线数据。
37.查看结构140可以包括具有一个或多个电子显示器的显示系统,用于将光引导到hmd 100的用户的(多个)眼睛。显示系统可以包括lcd、有机发光二极管(oled)显示器或微型led显示器中的一个或多个,用于向hmd 100的用户发射光(例如内容、图像、视频等)。
38.在一些示例中,传感器145可以被包括在查看结构140中。在一些方面中,传感器145是用于捕获hmd 100的用户的眼睛的(多个)图像以进行眼睛追踪操作的相机。在其他方
面中,传感器145是同时定位和映射(slam)传感器,诸如光学传感器、测距仪、lidar传感器、声纳传感器等,用于映射用户和/或hmd 100周围的环境。
39.在一些方面中,传感器145可以包括一个或多个小直径光学元件,诸如透镜、偏振器、波导、反射器、波片等。在一些方面中,“小直径”光学元件是指具有3毫米或更小的直径(例如孔径)的光学元件。如上面提及的,随着hmd的各种系统(例如眼睛追踪系统或slam系统)的要求和准确性的提高,制造各种小直径光学元件所需的准确性也随之提高。
40.常规光学元件的制造通常开始于通过金刚石车削、研磨坯料或通过在模具中形成光学元件来生成光学元件的粗糙形状。随后,光学元件或其模具可以被抛光至其最终形式,以实现期望的形状和/或表面光洁度。在一个示例中,抛光可以被采用以移除光学表面上的“高点(high spot)”。常规的抛光方法涉及使用被应用于光学表面的旋转垫或旋轮。然而,针对小直径光学元件(例如孔径小于3mm的透镜),使用旋转垫或旋轮很难达到期望的准确性。
41.因此,本公开的各个方面涉及光学表面的子孔径抛光,诸如用于形成各种光学元件的模具的表面和/或光学元件本身的表面。在一些方面中,高频(例如超声(》20khz))致动器被用于各种光学元件的子孔径抛光。例如,如下面将描述的,高频致动器可以被配置为振动抛光臂,该抛光臂包括附接至喇叭端部的抛光球。根据本文描述的各个方面,光学元件的抛光可以提供直径小于10微米的抛光区域。
42.图2图示了根据本公开的各个方面的超声抛光系统。超声抛光系统200的所图示的示例包括外壳202、超声致动器204和抛光臂206。示例抛光臂206被示出为包括喇叭208和抛光球210。图2还图示了光学元件212a和212b。如图2所示,光学元件212a被图示为具有光学表面205a和孔径213a的透镜,而光学元件212b被图示为具有表面205b和孔径213b的模具。
43.超声致动器204被示出为被包括在外壳202中,并且被配置为生成超声振动。在一个示例中,超声振动的频率大于20khz。在另一示例中,超声振动的频率在20khz到40khz的范围内。在一些实现中,超声致动器204包括磁致伸缩致动器。磁致伸缩致动器可以包括铁磁材料,该铁磁材料响应于被施加到铁磁材料的磁场而生成超声振动。在另一实现中,超声致动器204包括压电致动器。压电致动器可以包括固体材料(例如晶体、陶瓷等),该固体材料响应于被施加到固体材料的电场而生成超声振动。
44.如图2所示,抛光臂被耦合至外壳,以接收由超声致动器204生成的超声振动。具体地,喇叭208的近端207被耦合至超声致动器204,以接收超声振动。在操作中,喇叭208被配置为将超声振动从喇叭208的近端207传播到远端209。在一些示例中,喇叭208可以由金属制成,诸如不锈钢合金。此外,虽然图2将喇叭208图示为具有弯曲形状,在其他实现中,喇叭208可以具有多种形状,诸如直线形状或具有多个曲线的形状。
45.抛光球210被附接至喇叭208的远端209。在一些示例中,抛光球210通过胶水、环氧树脂或其他粘合剂被附接至喇叭208的远端209。在一些示例中,抛光球210被焊接至远端209。在又一示例中,抛光球210可以包括用于将其稳固到远端209的螺纹腔。
46.抛光球210可以由多种材料制成,诸如蓝宝石、陶瓷或聚合物。如图2所示,抛光球210可以具有球形形状。在一些示例中,抛光球210可以具有3毫米或更小的直径。在一个实施例中,抛光球210的直径在0.5毫米至3毫米的范围内。
47.在操作中,抛光球210被配置为响应于超声振动而振动。如图2所示,抛光球210被
配置为响应于传播到喇叭208的远端209的超声振动而提供横向振动211(即,沿着xy平面)。在一些示例中,抛光臂206(包括喇叭208和抛光球210)具有与由超声致动器204生成的超声振动的频率相匹配的自然频率。在一些实施例中,喇叭208和抛光球210的组合质量被配置为提供与超声振动的频率相匹配的抛光臂206的自然频率。在其他示例中,由超声致动器204生成的超声振动的频率被调谐,以与抛光臂206的自然频率相匹配。
48.如将在下面参照图4和图5更详细地描述的,抛光球210被配置为在光学元件的表面上提供小于光学元件本身的孔径的抛光区域。例如,如上面提及的,光学元件212a在图2中被示出为具有孔径213a的透镜。因此,抛光球210可以被施加到表面205a,以提供小于孔径213a的抛光区域。在一些示例中,光学元件212a可以是玻璃或聚合物。通过另一示例,光学元件212b在图2中被示出为用于形成各种小直径光学器件(诸如透镜)的模具。光学元件212b被示出为包括孔径(即,直径)213b。因此,抛光球210可以被施加到表面205b,以提供小于孔径213b的抛光区域。在一些示例中,孔径213a/213b为3毫米或更小,并且由抛光球210提供的抛光区域具有10微米或更小的直径。
49.图3图示了根据本公开的各个方面的超声抛光系统300。超声抛光系统300的所图示的示例被示出为包括计算机数控(cnc)定位器302、超声致动器304、抛光臂306、计算设备314和干涉仪316。抛光臂306被示出为包括喇叭308和抛光球310。光学元件312也在图3中示出。
50.超声致动器304、抛光臂306、喇叭308和抛光球310的配置类似于上面参照图2描述的对应组件204、206、208和210。如图3所示,超声致动器304和抛光臂306可以被附接至或并入cnc定位器302,以改变抛光球310相对于光学元件312的表面311的位置。
51.在一个方面中,cnc定位器302是由计算设备314生成的一个或多个控制信号315所控制的机动化机动平台。在一些示例中,cnc定位器302是被配置为将抛光臂306和/或光学元件312移动到各种地点和/或深度的cnc铣床。在一些实施例中,cnc定位器302可以包括一个或多个直接驱动步进电机或伺服电机,以便提供抛光臂306的高准确移动,从而沿着多个轴(例如x、y和z轴)提供抛光球310。
52.在一些方面中,计算设备314被配置为生成控制信号315,以引导cnc定位器302改变抛光球310和/或光学元件312的位置,以在光学元件312的表面311上沿着抛光路径引导抛光球310。通过示例,图4图示了根据本公开的各个方面的沿着光学元件312的表面311的抛光球310的抛光路径404的顶视图。在一些方面中,cnc定位器302被配置为沿着抛光路径404引导抛光球310来以连续方式抛光整个表面311。因此,图4将抛光路径404图示为具有螺旋图案。然而,抛光路径404的各种其他图案(诸如光栅或准随机曲流)可以被用于抛光表面311。
53.图4图示了当cnc定位器302沿着抛光路径404引导抛光球310时抛光球310的各种位置(例如位置406a和位置406b)。如上面提及的,抛光球310可以响应于由超声致动器生成的超声振动而横向振动。因此,在操作中,当抛光球沿着抛光路径404引导时,抛光球310可以在行程路径408上振动(例如由于横向振动)。当在位置406a处时,抛光球310可以沿着行程路径408振动以提供抛光区域410a。如上面提及的,抛光区域410a可以具有10微米或更小的直径。
54.在一些示例中,cnc定位器302可以由计算设备314引导以在抛光球310沿着抛光路
径404引导时改变一个或多个参数,以调整在一个或多个位置处从表面311移除的材料量。在一个方面中,cnc定位器302可以调整抛光球310沿着抛光路径404引导的速度。通过示例,cnc定位器302可以在抛光球310穿过位置406a时以第一速度412a移动抛光球310。然而,当抛光球310穿过位置406b时,速度可以被调整到第二速度412b。在一个示例中,cnc定位器302可以降低抛光球310的速度,以增加抛光球310在表面311的区域上保持的时间量以增加从表面311移除的材料量。
55.现在返回到图3,cnc定位器302还可以被配置为改变由抛光球310施加到表面311的负载322。在一些方面中,负载322是由cnc定位器302施加到抛光臂306的向下机械力。在一些示例中,cnc定位器302可以响应于控制信号315来调整负载322,以调整抛光区域(例如,图4的抛光区域410a和/或410b)的大小。在一个方面中,cnc定位器302可以增加负载322,以增大由抛光球310提供的抛光区域的大小。在另一方面中,cnc定位器302可以在沿着抛光路径的一个或多个位置处增加负载322,以增加从表面311移除的材料量。
56.如上面讨论的,计算设备314被配置为生成控制信号315,以引导cnc定位器302沿着抛光路径(例如图4的抛光路径404)改变抛光球310的位置。另外,计算设备314可以被配置为改变cnc定位器302的一个或多个参数(例如速度和/或负载),以调整由抛光球310在沿着抛光路径404的各个位置处移除的材料量。在一些示例中,计算设备314被配置为基于光学元件312的表面误差图改变一个或多个参数。在一个方面中,表面误差图是光学元件312的当前表面311的表示,并且可以标识表面311上的一个或多个高点和/或低点。在另一方面中,表面误差图可以标识表面311上的偏离光学元件312的期望形状的一个或多个地点。
57.因此,在一些示例中,超声抛光系统300可以包括干涉仪316,该干涉仪316被设置为获得光学元件312的一个或多个表面测量值(即,测量值317)。在一个方面中,干涉仪316被配置为测量光学元件312的小位移、折射率变化和/或表面不规则性。通过示例,干涉仪316可以在光学元件312的各个地点处生成单个光源318。单个光源318可以被拆分为两个光束,这些光束在不同的光学路径中行进,然后被组合以产生干涉。然后干涉可以被分析以生成测量值317。响应于接收到测量值317,计算设备314可以生成表面误差图,然后它用于生成移除图。在一些方面中,一个或多个控制信号315由计算设备314基于移除图生成。
58.如上面提及的,当抛光球(例如图3的抛光球310)沿着抛光路径引导时,抛光球也可以遵循行程路径(例如由于横向振动)。因此,根据本公开的各个方面,图5a至图5c图示了抛光球的各种行程路径(例如行程路径504a、504b和504c)、接触区域(例如接触区域502)和对应的抛光区域(例如抛光区域506a、506b和506c)。
59.图5a图示了示例接触区域502。在一些方面中,接触区域502表示抛光球和光学元件的表面之间的接触区域。接触区域502的大小可以取决于多种因素,诸如被施加到抛光球的负载、抛光球的直径以及抛光球和/或光学元件本身的材料特性。在操作中,抛光球可以响应于超声振动而振动,以提供产生有效抛光区域506a的行程路径504a。抛光区域506a可以具有小于10微米的直径。
60.如图5a所示,行程路径504a是直线行程路径,其响应于超声振动而提供抛光球沿着y轴的移动。在一个示例中,直线行程路径响应于由压电致动器生成的超声振动来提供,该压电致动器可以被包括在超声致动器(例如图3的超声致动器304)中。
61.图5b图示了行程路径504b,其为另一直线行程路径,但提供抛光球沿着x轴的移
动。如所示,抛光球沿着行程路径504b的移动提供了有效抛光区域506b。类似于上面讨论的行程路径504a,图5的行程路径504b可以响应于由压电致动器生成的超声振动而生成。
62.图5c图示了示例椭圆行程路径504c。如图5c所示,椭圆行程路径504c提供抛光球在xy平面上的椭圆移动,以提供有效抛光区域506c。在一个示例中,椭圆行程路径504c响应于由磁致伸缩致动器生成的超声振动来提供,该磁致伸缩致动器可以被包括在超声致动器(例如图3的超声致动器304)中。
63.根据本公开的各个方面,图6图示了用于与超声抛光系统一起使用的示例计算设备602。计算设备602的所图示的示例被示出为包括通信接口604、一个或多个处理器606、硬件608和存储器610。计算设备602是图3的计算设备314的一个可能实现。
64.通信接口604可以包括无线和/或有线通信组件,使得计算设备602能够将数据传输给其他设备并且从其他设备接收数据,诸如图3的cnc定位器302。硬件608可以包括附加硬件接口、数据通信或者数据存储硬件。例如,硬件接口可以包括数据输出设备(例如电子显示器、音频扬声器)和一个或多个数据输入设备。
65.存储器610可以使用计算机可读介质(诸如计算机存储介质)实现。在一些方面中,计算机可读介质可以包括以用于存储信息(诸如计算机可读指令、数据结构、程序模块或其他数据)的任何方法或技术实现的易失性和/或非易失性、可移除和/或不可移除介质。计算机可读介质包括但不被限于ram、rom、eeprom、闪存或者其他存储器技术、cd-rom、数字通用盘(dvd)、高清多媒体/数据存储盘或者其他光学存储装置、磁盒、磁带、磁盘存储装置或者其他磁性存储设备或者能够被用于存储信息以由计算设备访问的任何其他非传输介质。
66.计算设备602的处理器606和存储器610可以实现表面误差图和移除模块612以及cnc控制模块614。表面误差图和移除模块612以及cnc控制模块614可以包括执行特定任务或者实现特定抽象数据类型的例程、程序指令、对象和/或数据结构。存储器610还可以包括由表面误差图和移除模块612和/或cnc控制模块614使用的数据存储库(未示出)。
67.表面误差图和移除模块612可以被配置为生成光学元件(例如图3的光学元件312)的表面误差图和移除图。在一个示例中,表面误差图和移除模块612可以响应于从干涉仪获得的一个或多个测量值(例如由图3的干涉仪316生成的测量值317)来生成表面误差图。在其他示例中,表面误差图和移除模块612可以基于一种或多种其他光学计量技术来生成表面误差图,诸如直接表面抛光(例如通过轮廓仪)。
68.cnc控制模块614被配置为生成一个或多个控制信号(例如图3的控制信号315),以引导cnc定位器(例如图3的cnc定位器302)改变抛光臂(例如抛光臂306)相对于光学元件的表面(例如光学元件312的表面311)的位置。在一些示例中,cnc控制模块614被配置为基于由表面误差图和移除模块612生成的移除图来生成控制信号。例如,移除图可以标识光学元件312的表面311上的一个或多个区域,这些区域是高区域或者附加材料需要被移除的区域。因此,cnc控制模块614可以生成控制信号,以在沿着抛光路径引导时改变抛光球的负载和/或速度,以增加在抛光球位于与光学元件的所标识高区域相对应的位置处时从光学元件的表面移除的材料量。
69.根据本公开的各个方面,图7是图示了用于光学元件的超声子孔径抛光的示例过程700的流程图。过程700是可以由图3的计算设备314和/或图6的计算设备602执行的一个示例过程。
70.在过程框702中,超声致动器(例如超声致动器304)能够生成超声振动。在一个方面中,cnc控制模块614可以通过经由通信接口604生成一个或多个控制信号315来实现超声致动器。接下来,在过程框704中,cnc控制模块614生成一个或多个控制信号(例如控制信号315)以改变抛光臂(例如图3的抛光臂306)的位置,以改变抛光臂相对于光学元件的表面的位置。
71.如上面提及的,在一些示例中,cnc控制模块614可以生成控制信号,以基于光学元件的表面误差图来改变参数,诸如抛光臂的负载和/或速度。因此,过程700还可以包括表面误差图和移除模块612接收一个或多个表面测量值(例如图3的测量值317),并且基于表面测量值来生成光学元件的表面误差图。cnc控制模块614然后可以生成一个或多个附加控制信号,以改变抛光球沿着光学路径的各个位置处的负载和/或速度,以调整从光学元件的表面移除的材料量。
72.本发明的实施例可以包括人工现实系统的制造,或者结合人工现实系统的制造实现。人工现实是在呈现给用户之前已经以某种方式调整的现实形式,可以包括例如虚拟现实(vr)、增强现实(ar)、混合现实(mr)、混合现实或其某种组合和/或衍生物。人工现实内容可以包括完全生成的内容或者与捕获的(例如现实世界)内容组合的生成内容。人工现实内容可以包括视频、音频、触觉反馈或其某种组合,并且其中任何一个可以在单个信道或多个信道中呈现(诸如对查看者产生三维效果的立体视频)。附加地,在一些实施例中,人工现实还可以与应用、产品、附件、服务或其某种组合相关联,其被用于例如在人工现实中创建内容和/或以其他方式被用于人工现实(例如在人工现实中执行活动)。提供人工现实内容的人工现实系统可以在各种平台上实现,包括连接至主机计算机系统的头戴式显示器(hmd)、独立式hmd、移动设备或计算系统或者能够将人工现实内容提供给一个或多个查看者的任何其他硬件平台。
73.本发明的所图示实施例的以上描述(包括在摘要中描述的内容)不旨在穷举或者将本发明限制于所公开的精确形式。尽管本发明的具体实施例和示例在本文中出于说明性目的描述,各种修改在本发明的范围内是可能的,如相关领域的技术人员将认识到的。
74.鉴于上面详述的描述,这些修改能够对本发明进行。在以下权利要求中使用的术语不应该被解释为将本发明限制于本说明书中公开的具体实施例。相反,本发明的范围将由以下权利要求完全确定,这些权利要求将根据权利要求解释的已建立学说来解释。