1.本发明涉及打桩机,并且更具体地涉及适用于海上操作的打桩机。本发明还涉及用于将桩向下打入到地层中的方法。
背景技术:
2.在海上将桩打入到地层中通常涉及使撞锤或锤从某个高度经由撞击板下落到桩的顶部上。为了将锤的向下的冲击力施加在桩的顶部的较大的表面区域上并且为了保护桩的顶部免受损坏,通常已经在撞击板或砧座的下侧部与桩的顶部之间安置木制的冲击衬垫(参见de8900692u1)。为了更好地保护撞击板和桩的顶部,还已经提出使用连接至撞击板的压力气体弹簧(参见de8900692u1)。为了保护锤和桩的顶部免受因锤直接冲击在桩上而造成的损坏,还已经提出在撞击板顶部上使用经液体填充的压力室,以在锤与桩的顶部之间提供液体阻力和截留气体缓冲(参见gb1576966a)。为此目的,还已经提出使用一堆弹簧盘或液压块以在锤与位于桩的顶部上的撞击板之间提供缓冲(参见us2184745a和us3498391a)。在由hollandsche beton groep开发的所谓的hydroblok冲击锤中也已经描述了在锤上方使用一堆油缓冲物和气缓冲物以对锤在位于桩的顶部上的砧座上的冲击进行缓冲。还已经提出在锤上方使用水柱以向锤提供向下的驱动力(参见wo2018030896、wo2013112049和wo2015009144)。
3.然而,已知打桩机的设计并不是非常适用于在海上将大直径桩打入到地层中。常规的打桩机在打桩机的锤能够向桩的顶部施加的冲击力方面已经受到限制。对于较大的桩(通常具有直径大于6米的边沿),由常规打桩机的锤提供的冲击力必须分配在大得多的区域上。也就是说,常规锤的力必须从桩的中央——即,锤冲击砧座的地方——分配到桩的具有该非常大的直径的边沿。这需要在锤与桩之间有非常大的砧座。
技术实现要素:
4.根据本发明的第一方面,提供了一种用于将桩打入到地层中、优选地在海上将桩打入到地层中的打桩机组件,该组件包括:
5.壳体,该壳体限定室,该室构造成容纳流体;
6.定位元件,定位元件构造成将壳体定位在桩处或桩上,其中,定位元件的至少一部分定位在室与桩之间;
7.致动装置,
8.其中,致动装置的致动使室相对于定位元件移位,使得室远离桩移动至升高位置,并且
9.其中,致动装置构造成将室从升高位置释放以朝向桩移位,使得由室在定位元件上施加力,以可控地将桩打入到地层中;以及
10.缓冲装置,缓冲装置包括构造成容纳缓冲流体的缓冲室,缓冲装置构造成在将桩向地层打入时通过缓冲流体的压缩对由室施加在桩上的力进行可控地缓冲;
11.其中,缓冲装置构造成当缓冲流体的压力产生超过壳体的重量的向上力时使室回弹至回弹位置;
12.其中,致动装置的进一步致动使室相对于定位元件移位,使得室从回弹位置移动至升高位置。
13.该布置结构提供了一种以高效的方式将桩、特别是较大的桩(其通常具有直径大于6米的边沿)打入到地层中的打桩机组件。与已知的锤布置结构相比,在该布置结构中,没有被封围在壳体内并被主动地驱动到桩上的锤。相反,利用具有流体例如水的室从远离桩的一段距离释放以将桩打入到地层中。该布置结构允许使用具有非常大的质量(特别是当填充有流体时具有非常大的质量)的室以及由室施加到桩上的“推动”,而不是使用被驱动的锤或撞锤重量。这样的布置结构相比常规的锤布置结构提供了更渐进的打击并且从而产生了更少的水下噪音。相比已知布置结构,水下噪音的降低是双重的。首先,降低了每次打击的峰值噪音水平,并且此外,室的大质量使得打桩机需要较少的冲击,并且从而减少累积的噪音(打击的次数乘以每次打击的峰值噪音)。
14.此外,使用定位元件将壳体定位在桩上(壳体位于桩上或接近桩的边沿),允许壳体与桩之间的精确对准(不需要中间元件,比如砧座)。由壳体施加的力然后能够通过定位元件直接地施加至桩,而不必经由砧座分配。这两个因素都有助于避免因桩与打桩机组件两者之间未对准而在桩或打桩机组件上产生不必要的应力。此外,当与现有技术的组件和/或设备相比较时,没有部件的实际冲击(例如金属锤在金属砧上的冲击),使该操作成为低水下噪音的打桩操作。
15.缓冲装置的使用允许更渐进地应用来自高的质量的壳体/室的较高的冲击能量水平。在使每次冲击对桩的影响持续更长时间的情况下,峰值力和桩振动减小,并且因此水下和空中噪音也得以降低。因此,就这样的布置结构而言,减少了在打桩操作期间对噪音减轻措施(例如噪音减轻气泡帘)的需要。更渐进地施加冲击力还有助于产生对桩的更均匀的加载,从而减少桩中的应力波动以及桩的安装疲劳。
16.通过在将室提升时利用回弹效应,减少了将桩打入到地层中所需的能量输入。也就是说,室仅对于初始提升而言通过全距离被提升至其升高位置。在随后的提升中,能量输入仅需要将室仅从回弹位置提升至升高位置。因此,减少了将室提升至其升高位置所需要的总的能量输入。换言之,室的回弹被用作对室的整个升高的部分贡献。
17.适当地,致动装置包括至少一个致动器。
18.适当地,致动装置位于室与定位元件的至少一部分的中间。以此方式定位致动装置(即在室与定位元件的一部分之间的空间中定位致动装置)有助于提升整个室/壳体(即,致动装置从室的下方向上推动以提升室),并且因此允许使用具有较大质量的较大的室/壳体以将桩打入到地层中。
19.适当地,致动装置包括具有伸出位置和缩回位置的中央移动元件。
20.适当地,致动装置的致动使中央移动元件从缩回位置移动至伸出位置。
21.适当地,致动装置包括构造成容纳流体的流体室,其中,流体室内的流体的量的增加使中央移动元件从缩回位置朝向伸出位置移动。
22.适当地,致动装置的中央移动元件具有与室的回弹位置相对应的半伸出位置。
23.适当地,致动装置还包括附加流体室,其中,中央移动元件根据流体室的流体压力
在伸出位置与缩回位置之间移动。
24.适当地,致动装置包括构造成将室保持(或锁定)在回弹位置处的锁定装置。这允许室被“捕获”在回弹位置。因此,提升操作是更加可控的,从而允许在需要时进行进一步的提升操作(从回弹位置提升至升高位置)。
25.适当地,锁定装置构造成通过将中央移动元件锁定或基本上固定在半伸出位置而将室保持在回弹位置处。
26.适当地,锁定装置包括具有打开构型和锁定构型的回流阀,其中,在锁定构型中,回流阀构造成允许致动装置的流体室内的流体的量增加而不减少。
27.适当地,在回弹位置,室基本上静止。特别地,回弹位置与室的回弹或反弹的顶点相对应,使得防止能量损失。
28.适当地,该组件还包括构造成对致动装置的致动进行控制的控制系统。
29.适当地,控制系统构造成对室的运动和/或位置进行监测。这允许控制系统确定室何时已经到达其最低位置以及/或者室何时朝向回弹位置回弹以及/或者室何时已经到达回弹位置。
30.适当地,控制系统构造成随着室朝回弹位置回弹而将回流阀在打开构型与锁定构型之间切换(即,从打开构型切换至锁定构型)。因此,一旦室到达回弹位置并被重力朝向桩拉回,回流阀基本上将室固定在回弹位置。
31.适当地,致动装置的流体室流体地联接至蓄积器。蓄积器用于储存来自致动器的流体室的加压流体并且在循环过程中根据需要引导流体进入到流体室中以及从流体室离开。
32.适当地,蓄积器构造成在室的回弹期间向致动装置的流体室供应流体,以驱动中央移动元件从缩回位置朝向半伸出位置移动。这有助于确保致动装置在回弹之后处于用以将室“捕获”的位置。
33.适当地,致动装置的中央移动元件连接至室并且能够随室移动,使得中央移动元件在室回弹至回弹位置时从缩回位置移动至半伸出位置。这有助于确保致动装置在回弹之后处于用以将室“捕获”的位置。
34.适当地,缓冲装置包括至少一个缓冲元件,所述至少一个缓冲元件包括具有伸出位置和缩回位置的中央移动元件,其中,缓冲室的容积随着中央移动元件从伸出位置向缩回位置移动而减小。
35.适当地,所述至少一个缓冲元件包括与缓冲元件的中央移动元件成一体的阻尼元件。阻尼元件有助于缓和室与缓冲元件之间的冲击。
36.适当地,所述至少一个缓冲元件包括与缓冲元件的中央移动元件成一体的容积均衡器元件。容积均衡器元件有助于防止在阻尼元件上存在过量的压力。
37.适当地,缓冲装置与致动装置是一体的。也就是说,致动装置包括缓冲装置。这减少了对附加部件的需要,并且使组件的构造和维护更加简单。此外,通过将缓冲装置与致动装置组合,缓冲装置也可以位于室与定位元件的至少一部分的中间,而不限制空间。在将缓冲装置定位在室与定位元件的至少一部分之间的空间中的情况下,允许容易接近以用于进行维护和其他类型的活动。
38.适当地,致动装置包括构造成容纳缓冲流体的缓冲室,其中,缓冲室的容积随着中
央移动元件从伸出位置向缩回位置移动而减小。
39.适当地,致动装置包括构造成对致动装置的内部缓冲特性进行调节的调节装置。适当地,调节装置构造成对缓冲室内的缓冲流体的量进行控制。这有助于对缓冲室内的缓冲流体的体积和压力进行控制,并且因此对致动装置的缓冲特性进行控制。通过能够调节这些特性,该构型允许在打桩操作期间精确地使用阻尼装置,其中,缓冲效应根据现场和实时操作的详情进行调整。
40.适当地,调节装置构造成对缓冲室内的流体的量进行控制。
41.适当地,定位元件的所述至少一部分(即定位在室与桩之间的至少一部分)是构造成将桩的上部表面覆盖的板元件。由于壳体和定位元件的这种构型,被施加到桩中的力恰当地分配到桩的整个周缘上,并且因此,打桩操作以节能的方式执行。
42.适当地,定位元件还包括以可释放的方式连接至桩的上部部分的套筒元件。套筒元件有助于保持桩与定位元件之间的相对位置/取向,并且因此提供稳固且稳定的系统。
43.适当地,壳体包括位于壳体的端部处的套筒部分,其中,套筒部分构造成环绕定位元件的套筒元件以提供定位元件与壳体之间的对准。以这种方式,提供了可靠的套筒组件(包括定位元件的套筒元件以及壳体的套筒部分),该套筒组件能够在打桩操作期间为组件提供稳定性。此外,这种构型将允许在打桩操作期间组件的精确对准。换句话说,定位元件的套筒元件以及壳体的套筒部分提供壳体和定位元件的重叠部分。这有助于确保壳体与桩之间的最小的相对横向位移/旋转,并且因此提高打桩机组件在桩上的稳定性。
44.适当地,室具有至少部分地延伸穿过室的通道。当通道延伸穿过整个室时、特别是当通道轴向地延伸穿过室时,提供了用于将工具(例如钻、水射流等)部署穿过室的路径。当轴向通道定位成与中空桩的轴线同轴时,工具可以接近并处理在桩正下方的土壤,以减少土塞阻力。例如,轴向通道可以用于安置防坠落器,防坠落器用于防止在突然的出乎意料的大桩组(在软的土壤层中通常有几米)的情况下对起重机的振动载荷。在某些示例中,致动装置经由轴向通道与室接合。也就是说,为了提升室,致动装置与轴向通道的边界壁接合并向轴向通道的边界壁施加力。
45.适当地,定位元件包括构造成至少部分地延伸穿过通道的引导元件。适当地,引导元件构造成随着室朝向桩移动而进一步延伸穿过通道。换句话说,引导元件和通道提供了壳体和定位元件的重叠部分。这有助于确保壳体与桩之间的最小的相对横向位移/旋转,并且因此提供打桩机组件在桩上的稳定性。
46.适当地,室经由设置在壳体的壁中的导管而填充有流体,其中壁具有用于控制流体流动的阀。因此,组件的室可以在现场填充,从而允许组件在空的情况下被运输至操作场地。室然后可以根据应用被填充至所需的液位(即适合用于将桩打入到地层中的所需的条件的液位)。
47.根据本发明的第二方面,提供了一种用于对根据本发明的第一方面的打桩机组件进行控制的控制系统,该控制系统包括:
48.至少一个控制器,所述至少一个控制器构造成将致动装置致动成:
49.使室相对于定位元件移位成使得室远离桩移动至升高位置;
50.将室从升高位置释放以朝向桩移位,使得由室在定位元件上施加力,以可控地将桩打入到地层中;以及
51.使室相对于定位元件移位成使得室从回弹位置移动至升高位置。
52.通过控制致动装置以这种方式操作,可以在提升室时利用回弹效应,从而帮助减少如上文所指出的能量输入。
53.适当地,控制系统还包括构造成对室的运动和/或位置进行监测的监测系统。
54.适当地,控制系统构造成随着室朝向回弹位置回弹而将回流阀在打开构型与锁定构型之间切换。
55.适当地,控制系统包括用于确定室的位置以及/或者室相对于定位元件的位移的传感器。
56.根据本发明的第三方面,提供了一种将桩打入到地层中、优选地在海上将桩打入到地层中的方法,该方法包括以下步骤:
57.提供待打入到地层中的桩;
58.在桩处或桩中以同轴布置的方式提供根据本发明的第一方面的打桩机组件;
59.将致动装置致动成使得室远离桩移动至升高位置;
60.对致动装置进行进一步致动以释放室,使得室朝向桩移位并且在定位元件上施加力;
61.将对由室施加在桩上的力进行可控地缓冲,以可控地将桩打入到地层中;
62.在室回弹至回弹位置之后对致动装置进行进一步致动,使得室从回弹位置移动至升高位置。
63.所提出的方法提供了一种将桩打入到地层中的简单且可靠的方式,该方式在贯穿整个打桩操作中具有最大的稳定性和平衡的重量分配。通过在可控地将桩向地层打入时对由室施加在桩上的力进行可控地缓冲,该方法有助于使组件能够执行具有最小的水下噪音产生并且从而具有最小的水下噪音传播的打桩操作。此外,通过在提升室时利用回弹效应,减少了将桩打入到地层中所需的能量输入。也就是说,室仅对于初始提升而言通过全距离被提升至其升高位置。在随后的提升中,能量输入仅需要将室仅从回弹位置提升至升高位置。因此,减少了将室提升至其升高位置所需要的总的能量输入。换言之,室的回弹被用作对室的整个升高的部分贡献。
64.适当地,该方法还包括重复以下步骤,直到将桩打入到地层中的预设定(预限定)位置中为止:
65.将致动装置致动成将室释放;
66.对由室施加在桩上的力进行可控地缓冲,以可控地将桩打入到地层中;以及
67.在室回弹至回弹位置之后将致动装置致动成使室从回弹位置移动至升高位置。
68.适当地,该方法还包括用流体大致填充室的步骤。适当地,流体是来自海上位置的水。
69.如本文中所使用的,应理解的是,术语“上部”、“下部”、“向上”、“向下”等就打桩机组件或打桩机组件的部件而言,是指组件或部件在定位在桩上、特别是在竖向延伸的桩上时的取向。应当理解的是,在打桩机组件组装/定位之前或在组件以非竖向取向定位之后,可以相应地调整这些术语。
70.如本文中所使用的,应理解的是,部件的“伸出”位置和“缩回”位置是相对术语。也就是说,在伸出位置中,部件相对于部件的缩回位置具有增加的长度(即,伸出长度)。当提
及具有活塞或活塞杆装置(或类似装置)的部件时,在伸出位置,杆与所述部件的缩回位置相比较从相应的部件进一步伸出。因此,“半伸出”位置是指在伸出位置与缩回位置之间的位置。例如,当伸出位置是指预定的伸出水平时,半伸出位置是指比预定的伸出水平小的伸出水平。例如,当提及构造成将壳体/室提升和释放的致动器的伸出时,致动器的伸出位置可以与壳体/室的预定的升高位置相对应,并且半伸出位置可以与壳体/室的半升高位置(例如回弹位置)相对应。
71.如本文中所使用的,应理解的是,就壳体/室而言,“回弹”位置是指在壳体/室在与缓冲装置冲击之后所到达的位置。也就是说,回弹位置与壳体/室在从升高位置释放/下落之后从缓冲装置回弹到的位置相对应。由于系统内的能量损失/摩擦,回弹位置将在下落位置(即冲击位置)与升高位置之间。通常,本文中所使用的回弹位置与“反弹的顶点”或由室在回弹期间所达到的最高的高度(室在该最高的高度处基本静止)相对应,但是应当理解的是,与反弹的顶点的微小偏差可能仍被认为是回弹位置。“回弹位置”另外可以称为“反弹”位置或“在回弹期间所达到的半升高位置”。
72.如本文中所使用的,应理解的是“流体的量”是指没有对体积和压力限制的流体的量。例如,被接纳在室内的“流体的量”可以是具有一定摩尔数的所述流体的流体。通常,该量将具有与给定的压力对应的体积。应当理解的是,被接纳在室内的流体的体积和压力将取决于室在任何给定时刻的容积(该容积可以是可变的)。
73.如本文中所使用的,应理解的是“缓冲流体”是指适用于在缓冲器/阻尼器中使用的流体。通常,本文中所使用的“缓冲流体”特别是指气体,气态状态允许气体压缩以有助于进行缓冲/阻尼。
附图说明
74.现在将仅通过示例的方式参照附图描述实施方式,在附图中:
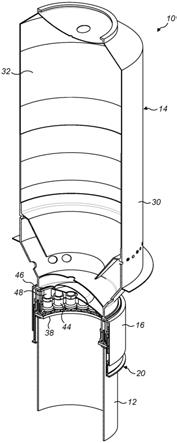
75.图1是打桩机组件的示例的竖向横截面立体图;
76.图2至图5是图1的打桩机组件的详细的竖向横截面立体图;
77.图6a是用于图1至图5的打桩机组件的缓冲元件的示例;
78.图6b图示了用于图1至图5的打桩机组件的缓冲元件的另一示例;
79.图7是用于图1至图5的打桩机组件的致动器的示例的竖向横截面图;
80.图8和图9图示了打桩机组件的另一示例的横截面图;
81.图10至图14图示了图8和图9的打桩机组件在操作的各阶段期间的侧视图;
82.图15至图17图示了打桩机组件的另一示例在操作期间的竖向横截面立体图;
83.图18图示了用于在所图示的打桩机组件中使用的致动装置的示例;以及
84.图19至图22图示了图18的致动装置在操作的各阶段期间的构型。
具体实施方式
85.图1至图5图示了用于将桩12打入到地层中的打桩机组件10的示例。打桩机组件10包括限定室32的壳体14。也就是说,壳体14包括由外壁30限定的内部容积(即室32)。在该示例中,壳体14基本上是大致筒形的(即壳体14的外壁30基本上是筒形的)。壳体的筒形形状使组件易于运输。此外,筒形形状允许在壳体内部建立的压力的良好的载荷传递。冲击期间
的内部压力导致壳体的壁中的环向应力。然而,在其他示例中,可以使用不同形状的壳体。
86.室32构造成容纳流体、例如水。换句话说,室提供了构造成在其中容纳和保持一定体积的流体的基本密封的空间。壳体14可以包括位于壳体14的壁中的阀,该阀(例如经由管道或导管)联接至流体源/储存器以允许室32在使用之前或在使用期间被填充。以这种方式,组件可以在空的室的情况下被运输至操作场地。然后室32可以在现场(在将室32提升之前或者在提升时以及在等待释放时)被填充至期望液位。应当理解的是,可以将“期望液位”预定为产生用于将桩打入到地层中的预定的冲击能量。用以填充室32的水可以是从海上位置泵送的水,例如海水。
87.在该示例中,室32具有能够容纳约1000吨至5000吨的水的容积。具有该容积的室32通常适用于将直径为约6米至15米的单桩打入到地层中。当室32填充有水时,壳体14(包括壳体14中的水)的总质量可以是用于打桩操作的典型的被驱动的锤的质量的至少8倍大(适当地,约8倍至12倍大)。例如,大型液压冲击锤的质量可以为约200吨至270吨,然而,其中具有水的壳体14的总质量可以为约2700吨。
88.打桩机组件10还包括构造成将壳体14定位在桩12处或桩12上的定位元件。定位元件包括定位在室32与桩12之间的一部分。在该示例中,该部分是构造成将桩12的上部表面覆盖的板元件38。板元件38可以是根据桩12的横截面形状的任何合适的形状。例如,板元件38可以是圆形的(对应于筒形的桩)。在所图示的示例中,板元件38的轮廓是环状的,对应于筒形/管状的桩12。
89.在该示例中,定位元件还包括以可释放的方式连接至桩12的上部部分的套筒元件20。换句话说,套筒元件20构造成环绕桩12的上部部分。在该示例中,套筒元件20的轮廓是筒形/管状以与筒形/管状的桩12对应。
90.在该示例中,板元件38设置在套筒元件20的端部(具体地,轴向端部)处。板元件38可以定位在套筒元件20的筒形壁的顶部上,或者可以在套筒元件20的外边缘处或在靠近套筒元件20的该外边缘的位置处附接或联接至套筒元件20的上部表面。以此方式,板元件38构造成当定位在桩12上时坐置于桩12的上部表面上,其中,套筒元件20从桩12的上部表面向下突出。在示例中,套筒元件20和板元件38可以形成为单个一体式的部件,或者替代性地,板元件38可以例如通过焊接或粘合剂而联接至套筒元件20。
91.在该示例中,定位元件至少部分地设置在壳体14的端部处。也就是说,当组件定位在桩12上时,定位元件至少部分地定位成邻近于或联接至壳体14的端部、特别是壳体的下部端部。在该示例中,板元件38和套筒元件20两者都定位在壳体14的下部端部处。这种接近的定位允许组件在打桩操作期间的精确对准。
92.在该示例中,壳体14包括位于壳体的端部处的套筒部分16。套筒部分16构造成至少部分地环绕定位元件的套筒元件20以提供定位元件与壳体14之间的对准。换句话说,壳体14的套筒部分16构造成在定位元件的套筒元件20上方延伸并且至少部分地与定位元件的套筒元件20重叠。以这种方式,在打桩操作期间(当壳体14相对于定位元件移动时),套筒部分16确保壳体保持与桩轴向地对准。由此该布置结构在打桩操作期间保持稳定。套筒部分16可以具有下述长度:该长度被确定为无论室32与桩12之间的轴向分隔如何都确保套筒部分16在打桩操作的每个阶段与套筒元件20至少有一定程度的重叠。
93.打桩机组件10还包括致动装置。在该示例中,致动装置包括至少一个致动器44,或
者对于所图示的示例包括多个致动器44,例如液压或气动致动器。
94.在该示例中,致动器44位于室32与板元件38的中间(即之间)。换句话说,在室32的下部部分与板元件38之间设置有空间(或分隔区域),并且致动器44位于该空间中。
95.在使用中,打桩机组件10定位在待打入到地层中的桩12上。桩12可以在陆上或海上。通常,桩12从地表基本上竖向地延伸,尽管桩可能偏离于竖向布置。
96.打桩机组件10以同轴布置的方式定位在桩12上。也就是说,壳体14构造成当定位在桩12上时从桩12沿桩12的纵向轴线延伸。例如,对于竖向的桩,室的轴线(例如大致筒形的室的纵向轴线)将相对于桩12的轴线竖向地延伸。
97.在某些示例中,室32可以具有延伸穿过室的通道。通道可以是轴向通道,例如沿着室32的基本上竖向地延伸的纵向轴线而延伸。通道可以提供用于使工具(例如钻、水射流等)部署穿过该通道的路径。当轴向通道定位成基本上与中空桩的轴线同轴时,工具可以接近并处理在桩正下方的土壤,以减少土塞阻力。
98.在该示例中,致动器44在板元件38上定位在对应于桩的壁的位置。换句话说,致动器44与桩的轴向地延伸的壁对准。例如,在所图示的打桩机组件中,致动器44定位成围绕环状板元件38的圆周/周缘,以便与筒形桩12的圆周相对应。以此方式,在打桩操作期间,由壳体/室施加的力(通过致动器)直接地作用在桩上,从而使桩上的应力最小化。
99.根据致动器44的规格以及待提升的质量,可以使用任何合适数目的致动器44。在该示例中,致动器44定位成围绕板元件38的整个周缘(与桩12的壁相对应)以确保壳体14的均匀提升。然而,在其他示例中,可以使用较少的致动器44,其等距地围绕周缘。
100.在打桩机组件10定位在桩12上之后,致动器44被致动成使得室32远离桩12移动。换句话说,致动装置的致动使室32相对于定位元件移位,使得室32远离桩12移动。整个室远离桩向上移动至升高位置。
101.致动器44的致动可以以任何合适的方式(与所使用的致动器44的类型相对应)提供,例如致动可以根据所使用的致动器44的类型通过液压或气动压力来提供。室32可以移位成直到室32到达距桩的预定距离(例如与室32具有适用于将桩打入到地层中的预定势能/冲击能量的位置相对应)为止。
102.致动器44然后被进一步致动以将室32释放,使得室32朝向桩12移位。也就是说,在该示例中,室32被释放以便从升高位置朝向桩12向下降落。在将室释放时,致动器44允许室仅由于重力(即没有附加的驱动力)而朝向桩12降落。
103.室32可以通过下述方式而被释放:使致动器44减压,例如至少部分地消除每个致动器44内的致动压力(即液压或气动压力)以使室32不受支撑。因此室32的重量迫使致动器44缩回。在其他示例中,定位元件或致动装置可以包括构造成将室32基本固定在预定高度处的锁定装置。一旦被固定到位,致动装置可以在室“解锁”和释放之前缩回。
104.在释放之后,室降落并且在定位构件上施加力(具体地是向下的力)。在该示例中,力经由致动器44而被施加在定位构件上。在某些示例中,在致动器44完全缩回之后,室32降落(经过致动器44存在过的空间)并冲击致动器44。替代性地,室32随着致动器缩回而降落并且在致动器达到完全缩回时冲击致动器44。该冲击的力从致动器44传递至板元件38并且通过板元件38传递至桩12。
105.上文所描述的布置的优势在于,与较小的锤被驱动以冲击桩12相比,更大的质量
(在该示例中是大的具有水的室)下落在桩12上。因此,由该大质量产生的力将桩“推动”到地层中,与利用锤的撞锤的冲击的组件相比,产生了较小的水下噪音并且在桩上造成较低的应力。在常规的锤布置中,致动器用于将锤经由砧座驱动到桩的中央中,该砧座将力分配至桩。对于较大的桩,需要较大的砧座来分配所施加的力。在上文所描述的布置中,力通过致动器和定位元件传递至桩消除了对砧座的需要,并且因此更适用于较大的桩。
106.在该示例中,壳体14包括构造成在室释放之后与致动器44冲击的冲击表面46。在该示例中,冲击表面46是与致动器44的定位相对应的环状表面。因此,由壳体14施加的力集中在致动器44上,从而导致力更高效地传递至致动器(并且随后传递至桩),由此减少了对于常规冲击锤所需要的大而重的砧座的需求。
107.在该示例中,组件10还包括用于在将桩向地层打入时对由室32施加在桩12上的力进行可控地缓冲的缓冲装置。缓冲装置的设置有助于对在将桩向地层打入时由壳体/室施加在桩12上的力进行控制。这允许通过在较长时间段内对所施加的力进行缓冲来控制峰值力(例如降低峰值力以减小水下噪音)。可以使用任何合适的缓冲装置,例如缓冲装置可以包括至少一个缓冲元件。
108.图6a中图示了缓冲元件100的示例。缓冲元件100可以位于任何合适的位置。例如,缓冲元件100可以定位成邻近于致动器44(例如在致动器44的径向内侧或外侧)或者位于间隔的致动器44之间。当室32被释放时,致动器44可以缩回超过缓冲元件100的上部端部,使得室32冲击缓冲元件100而不是致动器44。以与先前针对致动器44所描述的相同的方式,缓冲元件100可以位于与桩的壁相对应的位置从而高效地传递力。
109.缓冲元件100包括中央移动元件,在该示例中包括活塞和杆装置102。在该示例中,缓冲元件100具有直径为约500mm至1200mm的活塞以及直径为约200mm至700mm的杆,但是可以根据所需的阻尼特性而使用任何尺寸合适的缓冲元件。
110.活塞和杆装置102具有伸出位置和缩回位置,其中,缓冲元件100构造成随着活塞和杆装置102从伸出位置向缩回位置移动而对由室32施加在定位构件上的向下的力进行缓冲。在该示例中,缓冲元件100包括构造成容纳缓冲流体(例如气体,比如氮气)的缓冲室104。随着活塞和杆装置102从伸出位置向缩回位置移动,缓冲室104的容积减小并且缓冲室中的流体被压缩。这用于使活塞减速(并最终停止)并且因此也使室32减速(并最终停止),室32将活塞和杆装置102朝向活塞和杆装置102的缩回位置驱动。换句话说,缓冲元件100通过缓冲流体的压缩对由室32施加在桩上的力进行可控地缓冲。
111.根据所需的阻尼/缓冲液位,缓冲元件100的缓冲特性可以在使用之前设定(或在冲击之间调整)。例如,缓冲室104中的流体的量可以被设定,以优化在桩上的冲击特征(也就是说,力-时间、df/dt、响应)。换句话说,可以优化缓冲特性,以减少所产生的噪音/桩振动,同时仍然提供所需的驱动性能。例如,在阻尼之后的所施加的峰值力应当使峰值力降低成由此减少振动和噪音。然而,在阻尼之后的所施加的峰值力应当仍足以克服静态土壤阻力(静态土壤阻力通常在数百兆牛顿的范围内)。
112.每个缓冲元件的缓冲特性的选择可以取决于以下各项:室32的冲击能量、以及/或者所使用的缓冲元件100的数目、以及/或者待打入到地层中的桩12的尺寸、以及/或者将桩12打入到地层中所需的室32的优选“下落”次数、以及/或者预期的静态土壤阻力。
113.在该示例中,缓冲元件100包括构造成容纳缓冲流体的另一缓冲室106。缓冲室
104、106被活塞分隔(并且相对于彼此密封)。可以控制各个缓冲室104、106中的流体的量(以及因此可以控制各个缓冲室104、106之间的相对压力),以对缓冲元件100的缓冲特性进行控制。换句话说,每个缓冲元件100具有平衡状态(也就是说,活塞由于作用在活塞上的相反的力抵消而处于静止的状态)。每个缓冲室104、106中的流体的量可以设定成使得缓冲元件100被预张紧并且因此防止室32对桩的猛烈冲击。
114.缓冲元件100可以包括构造成对缓冲元件100的内部缓冲特性进行调节的调节装置。例如,缓冲元件100可以控制一个或更多个阀,所述一个或更多个阀构造成对缓冲室104、106中的至少一者内的流体的量或流体的压力进行控制。
115.作为示例,在平衡状态下,缓冲元件100的缓冲室104、106可以具有约60巴至140巴的初始压力。在对由室在桩上施加的力进行缓冲期间,缓冲室104中的峰值压力可以达到约100巴至约600巴的峰值压力。
116.缓冲元件100在打桩操作的初始阶段的平衡状态可以包括室(室中有水或没有水)的重量。也就是说,每个缓冲元件100的缓冲室104、106可以被加压,直到缓冲室104、106中的压力(更具体地,缓冲室104、106之间的压力差)使得室的重量被由缓冲元件100所产生的向上力支撑(即室32被缓冲元件100稍微提升)为止。致动装置一经致动,致动器44从缓冲元件100承受室32的重量。在这样做时,每个缓冲元件的活塞将找到新的平衡位置。
117.室32对活塞和杆装置102的冲击可以使(每个缓冲元件100的)缓冲室104中的流体压缩,直到缓冲室104中的压力(在该示例中缓冲室104、106之间的压力差)产生比室的重量大的向上力(横跨所有缓冲元件100)为止。在这种情况下,室可以“反弹”或“回弹”至回弹位置。也就是说,一旦缓冲元件100的活塞到达其缩回位置,活塞将开始部分地朝向其伸出位置移动,从而到达与室的回弹位置相对应的半伸出位置。另一缓冲室106中的缓冲流体然后被压缩以使活塞的向上移动减速。在某些示例中,当室32处于其反弹的顶点处(即回弹位置处)时,致动器44可以被致动以进一步提升室32(以开始另一行程)。在这样做时,由于提升操作在室处于回弹位置时开始,因而减少了然后使室返回至其升高位置所需的能量输入。换句话说,由每个缓冲元件100的缓冲室104、106提供弹簧效应,使得当壳体被可控地释放以将桩打入到地层中时,缓冲装置的弹性允许更好地分配向下的力,同时水下噪音显著降低。
118.图6b中图示了缓冲元件1000的另一示例。缓冲元件1000大体上对应于缓冲元件100,其中,对应的特征以相同方式标记(仅利用前缀10而不是前缀1标记)。
119.在该示例中,缓冲元件1000还包括与缓冲元件1000的中央移动元件1002成一体的阻尼元件或减震器1008。特别地,阻尼元件1008与中央移动元件1002的杆成一体并且能够在中央移动元件1002的杆内移动。
120.阻尼元件1008的至少一部分从中央移动元件1002的杆的上部部分向上延伸。以此方式,室32最初将冲击阻尼元件1008而非缓冲元件1000的中央移动元件1002。因此,阻尼元件1008抑制了力中的一部分力,否则这部分力将直接地施加至中央移动元件1002。在这样做时,中央移动元件1002以更渐进的方式加速,并且室32与中央移动元件1002之间的速度差在它们之间发生冲击之前减小。这有助于缓和室32与缓冲元件1000之间的冲击。此外,流体室1004中的最大压力减小,以减小缓冲元件1000的设计压力。可以使用任何合适的阻尼元件或减震器。在该示例中,阻尼元件1008是通过液压流体的压缩和受限制的流动来抑制
所施加的力的液压阻尼元件。
121.当壳体32冲击阻尼元件1008时,阻尼元件1008被加速。阻尼元件1008内的压力增大。最终,压力增大成使得阻尼元件1008对中央移动元件1002施加力,中央移动元件1002也被加速。
122.在某些示例中,随着阻尼元件1008相对于缓冲元件1000移位,阻尼元件1008中的压力可以变得非常高。例如,当使用具有高的“缓冲刚度”的缓冲元件1000时,阻尼元件1008相对于中央移动元件1002的小的位移将导致压力的大的增加。在这样情况下,为了有助于降低阻尼元件1008中的压力,如图6b中所示出的,缓冲元件1000还可以包括可选的容积均衡器元件1010,容积均衡器元件1010与缓冲元件1000的中央移动元件1002成一体。
123.在该示例中,容积均衡器元件1010包括安装在缓冲元件1000的中央移动元件1002内的活塞元件1030。特别地,活塞元件1030安装在中央移动元件1002的活塞内。
124.中央移动元件1002内限定有均衡器室1032。活塞元件1030能够相对于中央移动元件1002移动,由此活塞元件1030相对于中央移动元件1002的运动改变均衡器室1032内的容积。均衡器室1032(例如通过阀元件)流体地联接至流体室1006,使得随着均衡器室1032的容积减小,均衡器室1032中的流体被迫进入到流体室1006中(即,流体通过活塞元件1030从均衡器室1032被泵入到流体室1006中)。
125.在中央移动元件1002的(向下)初始移位期间,活塞元件1030由于流体室1004中的压力增加而被向上挤压。这减小了均衡器室1032的容积并且将流体泵入到流体室1006中,从而增加了流体室1006中的压力。这用于补偿由于缓冲元件1000的中央移动元件1002的移位而导致的流体室1004的容积减小。因此,缓冲元件1000的室1004、1006内的压力保持基本上相等并且没有力在中央移动元件1002上积聚。在中央移动元件1002的某个行程之后,活塞元件1030将被向上挤压至其最大程度并且流体室1004中的压力将开始增大。
126.以此方式,容积均衡器元件1010用于在中央移动元件1002的初始移位期间降低缓冲元件1000的“缓冲刚度”。这有助于缓和在阻尼期间阻尼元件1008内的压力增加。
127.在图1至图5中所图示的示例中,缓冲装置不是包括与致动器44分开的缓冲元件100,而是缓冲装置可以与致动装置成一体。也就是说,当桩被打入到地层中时,每个致动器44用于对由室32施加在桩12上的力进行缓冲。因此,当参照图1至图5中所图示的示例时,术语“致动装置”和“缓冲装置”通常可以互换地使用。
128.图7图示了该示例的致动器44(其具有集成的缓冲功能)的横截面。致动器44包括具有伸出位置和缩回位置的中央移动元件,即活塞48。致动器44包括流体室(或流体容积)58,流体室(或流体容积)58构造成容纳流体,例如合适的液压流体、比如油。在使用期间,流体室58内的油的量的增加促使中央移动元件48从缩回位置朝向伸出位置移动(即,导致致动器44致动)。
129.在该示例中,活塞48是长形的并且至少部分地容纳在致动器壳体54内。活塞48能够在致动器壳体54内移动,但是活塞48通过活塞48的凸缘部分62与致动器壳体54的唇部部分50之间的接合而被防止与致动器壳体54分开。
130.在该示例中,流体室58由在活塞48内轴向地延伸的中空空间限定。流体室58构造成接纳导管/通道59,导管/通道59将流体室58流体地联接至流体源/储存器。在该示例中,导管59从靠近致动器44的基部的位置向上延伸,导管59基本上与流体室58的中空空间同
轴。导管59构造成在活塞48处于缩回位置时基本上填充流体室58。
131.随着将油通过导管59供应至流体室58,流体室58中的压力增加。这促使活塞48相对于导管59移动。具体地,活塞48沿着导管59轴向地滑动,从而增加流体室58的容积。
132.在该示例中,致动器44包括构造成对流动到流体室58中或者流动离开流体室58的流进行控制的阀70。阀70经由导管59流体地联接至流体室58。
133.在该示例中,致动器44还包括附加的流体室60,附加的流体室60构造成容纳流体,例如液压流体、比如油。在该示例中,附加的流体室60被限定在活塞48的外表面与致动器壳体54的内表面之间。活塞48与致动器壳体54的内表面之间的空间对应于流体室60。
134.在该示例中,致动器44包括构造成对流动到流体室60中或者流动离开流体室60的流进行控制的阀72。虽然图7中未示出,但在某些示例中,附加的流体室60流体地联接至第一流体室58。也就是说,阀70和阀72可以通过导管或管道联接。在这样的示例中,当活塞48处于缩回状态时(即在致动之前或者在致动之间),流体室60可以用于储存来自第一室58的流体。换句话说,当阀70和阀72两者都打开(并且流体室58和流体室60通过阀70、72流体地联接)时,油可以被允许随着活塞伸出/缩回而在流体室58与流体室60之间通过。在某些示例中,流体室58的(在活塞48处于其最大伸出位置时实现的)最大容积基本上等于流体室60的(在活塞48处于其最大缩回位置时实现的)最大容积。
135.通常(例如在阀74打开的情况下),中央移动元件根据流体室的流体压力而在伸出位置与缩回位置之间移动。也就是说,如果流体室58中的油的压力高于流体室60中的流体的压力(例如,由于室32对活塞48的冲击),则活塞48从伸出位置移动至缩回位置(以达到平衡)。随着活塞移动,室58中的流体被压出到流体室60。
136.根据壳体32的质量以及施加在桩12上的预期的力,可以确定各个流体室58和流体室60中的油的量以提供活塞48的特定的平衡位置。例如,平衡位置可以与活塞48处于相对伸出位置相对应,以防止壳体32对桩12的猛烈(并且因此响亮)的冲击。
137.致动器44构造成随着活塞48从伸出位置向缩回位置移动而对由室32施加在定位构件上的向下的力进行缓冲。换句话说,致动器44构造成使得室随着每个致动器44的活塞48从伸出位置向缩回位置移动而减速。
138.在该示例中,致动器44包括缓冲室68,缓冲室68构造成容纳缓冲流体,例如气体、比如氮气。在该示例中,缓冲室68被限定在导管59的外表面与致动器壳体54的内表面之间。特别地,致动器壳体54通过活塞48的凸缘部分62被分成缓冲室68和流体室60。
139.缓冲室68的容积随着活塞48从伸出位置向缩回位置移动而减小。特别地,随着活塞48在导管59上朝向致动器44的基部滑动,缓冲室68的容积减小。
140.致动器44的缓冲作用由缓冲室68中的缓冲流体提供。更具体地,随着活塞48从伸出位置向缩回位置移动,由于缓冲室68的容积减小,活塞48将压缩缓冲室68中的气体。通过缓冲室68中的气体的压缩所提供的阻力用于使活塞48减速(并且类似地使油从流体室58到流体室60的流通减速)(并最终停止)。因此,将活塞48朝向活塞48的缩回位置驱动的室32也减速并最终停止。
141.在该示例中,致动器44包括构造成对致动装置的内部缓冲特性进行调节的调节装置。特别地,致动器44包括构造成对缓冲室中的气体的量进行控制的阀74(尽管阀74在图7中未示出为流体地联接至缓冲室68)。在这样做时,可以针对给定的载荷对每个致动器44的
缓冲室68中的压力进行控制。因此,还对活塞/室的减速以及由此产生的力-时间响应进行控制。
142.在使用中,当使用如图7中所图示的致动器44时,加压的油(例如从储存器中泵出的加压的油)对于每个致动器44中的阀70是可用的。类似地,加压的氮气对于每个致动器44的阀74是可用的。阀70然后被打开以向流体室58提供流体,从而将活塞48致动以提升壳体14。典型的液压压力范围可以是从约200巴至420巴。
143.如先前所描述的,致动器44的致动用于将室32/壳体14提升至升高位置。阀72可以在此时打开,以允许活塞48在不必对室60中的固定量的油进行压缩的情况下移动至活塞48的伸出位置。因此,随着活塞向活塞的伸出位置移动,第二室60中的油被活塞的凸缘部分62挤出(换句话说,凸缘部分62朝向致动器44的唇部部分50前进)。
144.阀74也可以在此时打开。首先,这允许活塞48移动至活塞的伸出位置而不受在室68中膨胀固定量的气体(这可能因减小的压力而导致抽吸力)的限制。此外,这允许将预定量的缓冲流体提供到缓冲室68中。由于缓冲室68的容积增加,气体可以被泵入或吸入。缓冲室68中的典型的峰值压力可以是从约200巴至800巴。
145.当致动器44到达预期的伸出位置时,然后关闭每个致动器的阀70、72、74。当在流体室58中使用相对不可压缩的液压液体时,以此方式关闭阀起到将活塞锁定就位的作用。
146.然后可以打开每个致动器44的阀70和阀72,使得流体可以从每个致动器44的第一室58流动至第二室60。这允许壳体14以及壳体14中的液体的重量迫使活塞48向下移动。随着活塞48向下推动,活塞48将迫使油从第一室58经由活塞48的第二阀72直到第二室60中。与此同时,活塞48(或更具体地活塞48的凸缘部分62)压缩室68中的气体。由此发生的缓冲室68中的气体压力的增加将使活塞48的向下运动减慢并最终停止,并且从而使壳体14的向下运动减慢并最终停止。
147.用于推动活塞48向下的力经由压缩气体传递至桩12。气体的压缩用于改变力-时间响应;延长向桩12施加力的持续时间,使得峰值力减小。
148.以与上文针对图6a的缓冲元件100所描述的类似的方式,在气体压缩期间,缓冲室68中的压力可以升高直到缓冲室68中的加压的气体在每个活塞48上施加的向上的力超过壳体14的重量为止。因此,活塞48和室32将被向上推进。也就是说,活塞48将移动至与室32的回弹位置相对应的半伸出位置。这种反弹/回弹能够导致油从每个致动器44的第二室60压出并流动回到每个致动器44的第一室58。
149.在某些示例中,在该回弹期间,每个致动器44的作为锁定装置操作的第二阀72优选地从打开位置切换到止回阀位置。这允许油在壳体的任何向上运动期间从每个致动器44的第二室60流动回到第一室58,但是阻挡油沿相反的方向流动。因此,如果壳体14再次开始向下加速,油压力将在每个致动器中的第一室58中增大。这将限制壳体14进一步移动。然后打桩机组件10准备进行下次行程。换句话说,致动器44可以锁定在半伸出位置;也就是说,锁定在回弹位置或“反弹”的顶点处。在这样做时,减少了然后使室32从半伸出位置返回到室32的升高位置所需的能量输入。
150.然后可以将致动器44重复致动,直到将桩12打入到地层中的预设位置中为止。
151.图8至图14图示了打桩机组件110的另一示例。该示例包括与先前的示例的特征基本对应的特征,其中,这些特征以相同的方式标记。为了简洁起见,通常不会再次描述与先
前的示例相似的特征。
152.根据先前的示例,打桩机组件110包括用于在将桩12向地层打入中时对由室32施加在桩12上的力进行可控地缓冲的缓冲装置。在该示例中,缓冲装置包括图6a中所图示的类型的多个缓冲元件100(但是替代地使用图6b中所图示的类型的缓冲元件1000及其组合/变体)。在该示例中,缓冲装置与致动装置是分开的(即,不是一体的)。换句话说,打桩机组件110包括与缓冲元件100分开的致动器144。然而,在该示例的变型中,打桩机组件110可以包括还提供缓冲功能的致动器44,比如图7中所图示的致动器。如关于先前的示例所描述的,当室32在从缓冲元件100回弹之后处于室32的反弹的顶点处(即,在回弹位置处)时,致动器144可以被致动以进一步提升室32(以开始另一行程)。
153.如图8和图9中最佳地所示出,缓冲元件100和致动器144位于室与定位元件的中间(即之间)。在该示例中,缓冲元件100在板元件38上定位于与桩的壁对应的位置。致动器144定位在缓冲元件100的径向内侧。
154.在该示例中,室包括部分地轴向延伸穿过室的通道200。在该示例中,通道200延伸穿过室32的下部部分。也就是说,壳体14包括位于壳体14的外表面中、特别是下部表面中的凹陷通道200。换句话说,通道从壳体的下部表面或基部向上(朝向室32的内部)延伸并且延伸穿过室32的至少一部分。
155.在该示例中,定位元件包括引导元件220。在该示例中,引导元件220为筒体或柱状结构。
156.在该示例中,引导元件220延伸穿过板元件38。也就是说,引导元件220从板元件38的第一侧部延伸至板元件38的第二侧部。在其他示例中,引导元件220可以仅从板元件38的表面延伸。例如,引导元件220可以从板元件38的上部表面延伸。
157.引导元件220可以与板元件38一体地形成,可以例如通过焊接固定至板元件38。
158.引导元件220构造成至少部分地延伸穿过室32的通道200。换句话说,引导元件220构造成与通道200配合或联接/通道200构造成接纳引导元件220。
159.图10至图14图示了打桩机组件110执行打桩操作。图10图示了处于初始、静止位置的打桩机组件110。致动器144缩回并且缓冲元件100在缓冲元件100的缓冲室中不包括气体。图11图示了处于待机位置的打桩机组件110。也就是说,缓冲元件100的缓冲室已经至少部分地填充有气体,使得该室已经从其静止位置被稍微提升。在此阶段,系统已准备好提升。图12至图14图示了在提升操作期间的打桩机组件。特别地,图12至图14图示了其中致动器144处于渐增地伸出的位置从而将室提升至升高位置的打桩机组件。
160.在提升/释放操作期间,室32相对于定位元件移动。因此,引导元件220相对于通道200移动。也就是说,在该示例中,引导元件220构造成随着室32朝向桩移动而进一步延伸穿过通道200。类似地,引导元件220构造成随着室32远离桩移动而从通道200部分地缩回。
161.在该示例中,引导元件220构造成使得引导元件220的一部分在所有提升/释放操作期间保持在通道200内(即引导元件220构造成只是部分缩回)。具体地,引导元件220被定尺寸成比室32从板元件38的最大位移长。
162.提供以这种方式相互作用的引导元件220和通道200有利于帮助保持壳体14/室32与定位元件(以及因此还与桩12)之间的对准。特别地,引导元件相对于桩具有固定的位置和取向。通过将组件构造成使得通道在壳体/室的整个提升和释放整个过程中与引导元件
接合,壳体/室保持与桩对准并且因此可以在桩上提供更加一致集中的力。
163.在该示例中,使用引导元件220/通道200的相互作用来代替套筒组件(即,定位元件的套筒元件以及壳体的环绕套筒元件的套筒部分)来提供一致的对准。然而,在某些示例中,组件可以包括引导元件/通道和套筒组件两者。
164.引导元件220可以完全地延伸穿过室32以提供对室32的增加的引导和支撑。此外,通道200/引导元件220可以是任何合适的形状。例如,通道200和引导元件220两者都可以具有正方形、矩形或i形横截面。为了提供紧密配合以及因此增加的稳定性,在某些示例中,引导元件的横截面基本上对应于通道的横截面。
165.图15至图17图示了打桩机组件210的另一示例。该示例包括与先前的示例的特征基本对应的特征,其中,这些特征以相同的方式标记。为了简洁起见,通常不会再次描述与先前的示例相似的特征。
166.以与先前示例类似的方式,室14包括轴向地延伸穿过室32的通道200。然而,在该示例中,通道200延伸穿过室32的整个长度。换句话说,通道200在室32的下部表面与上部表面之间延伸。
167.以与先前示例类似的方式,定位元件包括构造成至少部分地延伸穿过室的通道的引导元件220。然而,在该示例中,引导元件220延伸穿过整个通道200。换句话说,引导元件从板元件38延伸、在室32的第一侧进入通道并穿过通道200、在室32的相反侧出现。
168.在该示例中,引导元件220是管状的,使得提供了穿过通道200的通路。因此,以与先前所描述的相同的方式,引导元件/通道提供用于使工具(例如钻、水射流等)部署穿过室的路径。
169.在该示例中,致动器144位于室32的远离缓冲元件100的端部处。换句话说,缓冲元件100位于室(具体地,室的下部端部)与定位元件的板元件38的中间并且致动器144定位成靠近室32的上部端部。
170.致动器144联接至引导元件220的端部。具体地,引导元件220具有联接至板元件38或者与板元件38一体地形成的下部端部以及构造成在室32上方从通道200延伸的上部端部。致动器144联接至引导元件的上部端部。
171.致动器144可以以任何合适的方式联接至引导元件220。例如,引导元件220的上部端部可以包括径向向外延伸的凸缘。致动器144可以联接至引导元件220的凸缘。在其他示例中,致动器144可以通过附接至引导元件220的上部端部的套环构件或连接构件联接至引导元件220。
172.致动器144将引导元件220联接至室32。也就是说,致动器144联接至引导元件220和室32两者。换句话说,在该示例中,引导元件220用作固定的提升点。在该示例中,致动器144各自包括构造成以可释放的方式夹紧室32的夹紧件96。
173.图15图示了处于初始位置的打桩机组件220。在该示例中,缓冲元件100被加压以支撑室32的重量。致动器144处于伸出位置并且经由夹紧件96联接至壳体32的上部表面。在其他示例中,缓冲元件100可以仅在一旦室的重量由致动器144承受时被加压。
174.然后致动器144被致动,使得室32远离桩移动。应当理解的是,可以使用如先前所描述的活塞/活塞杆类型的致动器144,但是以“倒置布置”的方式。在该倒置布置中,致动装置的致动促使其活塞从伸出位置移动至缩回位置。随着致动器缩回,室32被朝向引导元件
220的上部端部向上牵拉。致动器缩回直到室到达桩/定位元件上方的预定高度为止。
175.然后致动装置被进一步致动以将室释放,使得室朝向桩移位。在该示例中,致动器通过释放夹紧件而被进一步致动,以使室有效地下落。然而,在其他示例中,可以通过移除用于初始致动致动器(即,将室向上驱动)的加压流体来进一步致动致动器。
176.然后致动器可以在相反的方向上被致动,以使致动器的中央移动元件延伸以返回至图15的初始位置并且重复打桩操作。
177.图18图示了用于在本文中先前所描述的类型的打桩机组件中使用的致动装置2000。在该示例中,致动装置2000用作具有单独的缓冲装置(例如图6a和图6b中所图示的那些缓冲装置)的打桩机组件的一部分。与上文描述的示例一样,致动装置2000的致动构造成使室32相对于定位元件移位,使得室32远离桩移动至升高位置并且使室32从升高位置释放以朝向桩移位。
178.在该示例中,致动装置2000包括具有中央移动元件248的至少一个致动器244,中央移动元件248具有伸出位置和缩回位置。致动装置2000的致动使中央移动元件248从缩回位置移动至伸出位置。在该示例中,中央移动元件248具有活塞和杆构型。
179.致动器244包括构造成容纳流体的流体室290。流体室290内的流体量的增加使中央移动元件248从缩回位置朝向伸出位置移动。
180.在该示例中,流体室290通过压力管线300流体地联接至加压流体(未示出)、例如油的储存器。压力管线300包括构造成对加压流体从储存器到流体室290的流动进行控制的控制阀298。控制阀298具有打开构型和闭合构型(分别示意性地图示为2981和2982)。
181.在该示例中,流体室290经由回流管线302流体地联接至蓄积器296。在使用时,离开流体室290的流体被朝向储存加压流体的蓄积器296引导。任何合适的蓄积器296可以用于在压力下储存来自流体室290的流体。例如,蓄积器296可以是压缩气体蓄积器,由此来自流体室290的加压流体用于对气体(或任何合适的可压缩流体)比如氮气进行压缩。
182.在该示例中,致动器244还包括附加流体室292,其中,中央移动元件248根据流体室290、292的流体压力而在伸出位置与缩回位置之间移动。在该示例中,附加流体室292也流体地联接至蓄积器296以允许离开附加流体室292的流体储存在蓄积器296中。在其他示例中,对于各个流体室290、292可以使用单独的蓄积器,或者附加流体室可以连接至单独的流体储存器。
183.与先前所描述的示例一样,使用致动装置2000的打桩机组件构造成适应并利用室32的反弹/回弹以减少所需的提升能量。也就是说,缓冲装置构造成当每个缓冲元件中的缓冲流体的压力导致向上的力超过由那个缓冲元件所支撑的壳体的重量时使室32回弹至回弹位置。致动装置2000然后构造成在致动装置的进一步致动时(而不是在进一步提升操作之前等待室从升高位置向下降落)使室32从回弹位置移动至升高位置。在这样做时,由于室被提高通过较小的距离(即从回弹位置被提高通过较小的距离),因此,对于每个后续的提升(例如对于第二提升、第三提升或更多提升),将室提高到其升高位置所需的能量输入减少。
184.在该示例中,致动装置2000包括构造成将室保持在回弹位置处的锁定装置。在该示例中,锁定装置包括具有打开构型和锁定构型(分别示意性地图示为2941和2942)的回流阀294。
185.在该示例中,回流阀294定位在流体室290与蓄积器296之间的流体连接(即回流管线302)上。在打开构型2941中,回流阀294允许流体在流体室290与蓄积器296之间流动。
186.在锁定构型2942中,回流阀294构造成允许致动器244的流体室290内的流体的量增加而不减少。也就是说,回流阀294的锁定构型2942对应于止回阀构型,因为流体能够从蓄积器296流动至流体室290,但是流体从流体室290至蓄积器296的流动被阻挡或锁定。
187.在该示例中,回流阀294构造成通过基本上将中央移动元件248锁定在与室32的回弹位置相对应的半伸出位置而将室32保持在回弹位置处。也就是说,随着室32回弹至回弹位置,中央移动元件248跟随室32的移动或被使得跟随室32的移动。当中央移动元件248到达半伸出位置时,中央移动元件248被回流阀294锁定,从而将室32保持在回弹位置以防止向下移动。
188.在该示例中,蓄积器296构造成在室32的回弹期间向致动器244的流体室290供应流体,以将中央移动元件248从缩回位置至少部分地朝向半伸出位置驱动。也就是说,当流体室290中的压力由于室32的向上(回弹)运动而降低时,储存在蓄积器296中的加压流体能够将致动器244朝向半伸出位置驱动。
189.在某些示例中,为了防止致动器244与壳体14之间失去接触,以及/或者为了确保致动器244到达半伸出位置,中央移动元件248可以连接至室32并且能够随室32移动,使得中央移动元件248在室32回弹至回弹位置时从缩回位置移动至半伸出位置。也就是说,中央移动元件248随着室32回弹而被牵拉至半伸出位置。
190.图19至图22图示了图18的致动装置在室32的提升/下落/回弹过程的各阶段期间的构型。特别地,图19至图22图示了阀294、298的构型。应注意的是,中央移动元件248被示意性地图示为跨越每个阶段处于恒定位置(实际上,中央移动元件248将根据阀294、298的构型在各阶段之间移动)。
191.图19图示了处于初始的“准备提升”构型的致动装置,其中,致动器244支撑壳体14/室32的质量以准备执行提升操作。在该构型中,控制阀298处于闭合构型2982并且回流阀处于锁定构型2942。因此,流体室290内的流体体积是固定的。室32的质量在提升之前受到支撑,并且流体室290内的压力与壳体14/室32的质量相对应。在某些示例中,在操作之间(即在致动装置进入到“准备提升”构型之前),室32可以由缓冲装置而非致动装置支撑。
192.图20图示了致动装置2000在“提升”阶段(即,室32远离桩朝向其升高位置被提升的阶段)期间的构型。在该位置,控制阀298已经移动至其打开位置2981以用来自储存器的加压流体(在该示例中约350巴)对流体室290加压。回流阀保持处于锁定构型2942以确保流体室290被加压。
193.图21图示了致动装置2000在“下落”阶段期间的构型(即允许室32被释放以朝向桩下落的构型)。在该位置,控制阀298已经返回至闭合位置2982,而回流阀294已经移动至其打开构型2941。这允许流体在室32的重量下从流体室290流通到蓄积器296。
194.如先前所描述的,随着室32下落,室32将冲击用以对由室施加在桩上的力进行可控地缓冲的缓冲元件。当缓冲元件使室32回弹时,致动装置切换至“回弹”构型。图22图示了处于“回弹”构型的致动装置,在“回弹”构型中,回流阀294已经切换至锁定构型2942。
195.来自蓄积器296的加压流体随着室32回弹而将中央移动元件248至少部分地朝向中央移动元件248的半伸出位置驱动,以及/或者中央移动元件248朝向中央移动元件248的
半伸出位置被牵拉(将加压流体从蓄积器296抽吸至致动器244)。当室32到达室32的上止点位置时,由于回流阀294阻止流体从流体室290流通至蓄积器296而阻止了室32降落。因此室32保持在回弹位置。
196.可以通过打开控制阀298执行从回弹位置的进一步的提升操作。也就是说,然后可以重复下落/回弹/提升循环,而不必执行将室32从室32的最低位置“完全提升”到室32的升高位置。
197.在该示例中,打桩机组件还包括构造成通过上文所描述的步骤对致动装置的致动进行控制的控制系统1200。在该示例中,控制系统包括至少一个控制器1202,所述至少一个控制器1202构造成将致动装置致动成:使室相对于定位元件移位成使得室远离桩移动至升高位置;将室从升高位置释放以朝向桩移位;以及使室相对于定位元件移位成使得室从回弹位置移动至升高位置。
198.在该示例中,控制系统1200构造成对室32的运动和/或位置进行监测。特别地,控制系统1200包括构造成对室32的运动和/或位置进行监测的监测系统1204。
199.在该示例中,监测系统1204至少包括用于对室32的位置以及/或者室32相对于定位元件的位移进行确定的传感器(未示出)。
200.技术人员将理解的是,在某些示例中,控制系统1200内的传感器可以是便于对室的机械位置进行测量的位置传感器。位置传感器可以是绝对位置传感器或相对位置传感器。也就是说,位置传感器可以确定室32何时到达特定位置,例如下止点或上止点位置。
201.在某些示例中,传感器可以通过推导室32降落的速度来确定室32的位移。因此,可以使用室32的加速度来确定室32何时开始回弹(即室32的速度方向何时从向下改变为向上)。
202.在该示例中,控制系统1200构造成基于从监测系统接收的数据(例如室的位置)对致动装置2000的致动(特别是回流阀294的致动)进行控制。例如,控制器1202构造成随着室32朝向回弹位置回弹而将回流阀294在打开构型与锁定构型之间切换。
203.在上述示例中的任一示例中,定位元件在桩的顶部上保持静止(即,定位元件用作静止的提升点,并且在操作期间定位元件与桩之间不存在移动)。因此,可以将桩封闭(例如使用阻流器),从而允许水或空气从桩内部受限制地流出。受限制的流出可以用作一种制动,从而防止桩在经过非常软的土壤时自由下落(这样做可以减少当桩下落时对起重机的振动载荷)。这样的阻流器可以安置在锤内部或者可以单独地安置在桩中。由于通过使用大质量件作为锤而实现的低的加速度水平以及定位元件的固定的定位,这都是可能的。
204.对本领域的技术人员将清楚的是,关于上面所描述的实施方式中的任一实施方式所描述的特征可以在不同的实施方式之间互换地应用。例如,图6a和图6b中所图示的类型(或其组合)的缓冲元件可以与上文所描述的任何兼容系统一起使用。作为另一示例,如图18至图22中所图示的致动系统可以使用作为上文所描述的任何兼容系统的一部分。上面所描述的实施方式是用以说明本发明的各种特征的示例。
205.贯穿本说明书的描述和权利要求,词语“包括”和“包含”及其变型是指“包括但不限于”,并且它们并不意在(并不)排除其他部分、添加物、部件、整体或步骤。贯穿本说明书的描述和权利要求,除非上下文另外要求,否则单数包含复数。特别是,在使用不定冠词的情况下,除非上下文另外要求,否则说明书应理解为考虑复数和单数。
206.结合本发明的特定方面、实施方案或示例所描述的特征、整体、特性、化合物、化学部分或组应理解为适用于本文中所描述的任何其他方面、实施方式或示例,除非与其不相容。本说明书(包括任何所附权利要求、摘要和附图)中所公开的所有特征以及/或者如此公开的任何方法或程序的所有步骤可以以任何组合方式进行组合,除了其中这样的特征和/或步骤中的至少某些特征和/或步骤是相互排斥的组合以外。本发明不限制于任何前述实施方式的细节。本发明扩展至本说明书(包括任何所附的权利要求、摘要和附图)中所公开的特征中的任何新颖的一个特征或任何新颖的组合,或扩展至如此公开的任何方法或程序的步骤中的任何新颖的一个步骤或任何新颖的组合。