1.本技术涉及基坑监测的技术领域,尤其是涉及一种深基坑水平位移连续监测系统和方法。
背景技术:
2.深基坑施工过程中,施工现场的各种震动因素常会导致基坑两侧的土体发生水平位移,长时间放任不管,基坑两侧的土体会发生滑坡甚至塌方等不良后果,影响施工安全,因此在基坑施工过程中需要经常对基坑两侧的土体进行水平位移监测,以掌握基坑相对两侧土体的水平位移规律,并根据数据做出相对的措施,确保基坑施工过程中的安全性。
3.目前,深基坑水平位移监测通常需要先在基坑两侧设置多个参照物,监测时由操作人员在该参照物相对的位置操作激光测距仪测量对该参照物进行位置测量,得出该参照物的实时位置,并与该参照物之前的位置进行比较,以此判断基坑水平位移程度。
4.针对上述相关技术,发明人认为存在以下缺陷:人工往返多个参照点进行基坑水平位移监测的方式通常是在间隔的时间段进行监测,导致基坑水平位移监测不连续,无法及时判断基坑的水平位移程度,因此,存在改进空间。
技术实现要素:
5.为了及时测量基坑的水平位移,本技术提供了一种深基坑水平位移连续监测系统和方法。
6.本技术提供的一种深基坑水平位移连续监测系统,采用如下的技术方案:一种深基坑水平位移连续监测系统,包括控制器、报警器、架设在基坑上方的导向杆以及设置在基坑相对两侧壁上的若干反射板;所述导向杆长度方向与基坑长度方向平行,所述导向杆垂直设置有连接杆,所述连接杆底端设置有激光测距仪,所述导向杆设置有驱动连接杆沿导向杆往复滑移的驱动机构,所述驱动机构还设置有驱动连接杆转动的转动组件;所述激光测距仪、驱动机构以及报警器均与控制器电性连接,所述控制器用于将激光测距仪与反射板的实时距离值跟预设的报警距离值做对比并将结果反馈给报警器,当所述激光测距仪与反射板的实时距离值小于报警距离值时,所述报警器发出报警信号。
7.通过采用上述技术方案,利用控制器控制驱动机构与转动组件带动激光测距仪对每组反射板的初始位置进行测量,得出激光测距仪与每组反射板的初始位移值,根据初始距离值在控制器中设置该组反射板的报警位移值,再通过控制器控制控制驱动机构带动激光测距仪测量连续循环测量每组反射板与激光测距仪的实际位移值并将该实际位移输入控制器中用于与该组反射板的报警距离值比较,若实时距离值大于报警距离值,则继续测量其余各组反射板,若实时距离值小于报警距离值,则通过控制器控制报警器发出报警信号以此来提醒施工方,相比传统通过人工在间隔时间段内操作激光测距仪进行监测的方式效率更高且可及时连续对基坑的水平位移进行监测,有利于更好地保障施工安全。
8.优选的,所述驱动机构包括滑动卡接在导向杆上的驱动板,所述驱动板滑动方向
与导向杆长度方向平行,所述驱动板垂直转动有主齿轮,所述导向杆设置有齿条,所述主齿轮与齿条啮合设置,所述驱动板还设置有驱动主齿轮转动的驱动件。
9.通过采用上述技术方案,通过主齿轮与齿条啮合,利用主驱动件驱动主齿轮正反转动便可带动驱动板、连接杆以及激光测距仪沿着导向杆的长度方向进行往复移动,使得激光测距仪的移动更加简单方便;优选的,所述连接杆垂直穿设于驱动板,所述转动组件包括同轴固定在连接杆的副齿轮,所述副齿轮位于驱动板上表面,所述副齿轮与主齿轮啮合设置;所述基坑侧壁的若干反射板沿基坑长度方向均匀分布且基坑相对两侧壁的反射板相错设置。
10.通过采用上述技术方案,通过主齿轮与副齿轮啮合,使得激光测距仪可以边转动边沿导向杆的长度方向移动,通过基坑相对两内壁的反射板相错设置,使得激光测距仪转动一定圈数后便可与基坑侧壁上的反射板的相对,从而便于激光测距仪测量自身与反射板的实时距离值。
11.优选的,所述连接杆底端呈球头状,所述连接杆底端还球绞有配重板,所述配重板底侧设置有用于供激光测距仪插入的限位框,所述限位框设置有限制激光测距仪滑移的锁紧部,所述配重板、限位框、激光测距仪以及锁紧部四者的重心位于连接杆轴线的正下方;所述配重板开设有供连接杆底端球绞的铰接槽,所述连接杆底端端部开设有滑孔,所述滑孔滑动连接有橡胶块,所述连接杆设置有驱使橡胶块上下滑移的升降组件。
12.通过采用上述技术方案,当配重板与连接杆球绞时,使得配重板可以始终保持水平状态,从而激光测距仪可以保持水平的状态会进行测量;有利于减少导向杆安装不水平或基坑施工过产生的震动导致激光测距仪呈倾斜状,从而影响激光测距仪测量精度的情况;当需要使配重板随同连接杆一同转动时,通过升降组件驱动橡胶块滑动至与铰接槽内壁抵紧,便可使连接杆可以带动配重块以及激光测距仪一同转动;当连接杆带动激光测距仪转动至与反射板正对时,通过副驱动件驱动橡胶块缩回滑孔,从而恢复配重板与连接杆底端的球绞状态,使得激光测距仪可以保持水平。
13.优选的,所述导向杆两端均设置有横梁杆,所述横梁杆两端横跨基坑上方并与地面抵接,所述导向杆两端均竖直向下转动连接有转杆,所述转杆穿设于横梁杆,所述横梁杆开设有用于供转杆穿设的滑移通孔;所述导向杆还设置有使自身与基坑保持相对固定的限位组件。
14.通过采用上述技术方案,通过往相互靠近的方向移动两组横梁杆,便可对两组横梁杆以及导向杆进行折叠收纳,通过设置限位组件,利用限位组件使导向杆与基坑保持相对固定,使得导向杆不易与横梁杆发生相对转动。
15.优选的,所述限位组件包括设置于转杆底端的水平板,所述水平板两端均垂直向下设置有固定板,所述横梁杆底部设置有螺纹套筒,所述螺纹套筒两端螺纹反向设置,所述螺纹套筒两端均螺纹连接有螺杆,所述螺纹套筒两端的螺杆分别垂直穿设于两组固定板,所述螺杆均设置有限位杆,所述限位杆与螺杆平行且所述限位杆穿设于固定板。
16.通过采用上述技术方案,转动螺纹套筒,使得两组螺杆相互远离,直至两组螺杆相互远离的一端分别与基坑相对的内壁抵紧,便可实现导向杆与基坑侧壁保持相对固定,同时还可以使导向杆长度方向与基坑长度方向平行,便于激光测距仪更高地测量反射板的位置。
17.优选的,所述反射板顶端设置有安装板,所述安装板垂直设置有安装杆,所述安装杆远离安装板的一端与反射板顶端铰接,所述反射回转轴线水平设置。
18.通过采用上述技术方案:通过反射板顶端与安装板铰接,使得反射板可以通过重力的作用始终保持竖直向下状态,使得激光测距仪可以更准确地测量反射板的实时位置。
19.一种深基坑水平位移连续监测方法:包括以下步骤:s1:通过控制器控制驱动机构与转动组件带动激光测距仪测量每组反射板与激光测距仪的初始距离值;s2:根据每组反射板与激光测距仪的初始距离值在控制器中设置每组反射板的报警距离值;s3:通过控制器控制驱动机构与转动组件带动激光测距仪循环测量每组反射板与激光测距仪的实时距离值;测量完一组反射板后,即将该组反射板与激光测距仪的实时距离值反馈至控制器中;s4:控制器将激光测距仪与反射板的实时距离值与该组反射板的报警距离值进行比较,若实时距离值大于报警距离值,则继续重复步骤s3;若实时距离值小于报警距离值,则反馈给报警器并由报警器发出报警信号。
20.通过采用上述技术方案,利用激光测距仪循环连续地测量每组反射板的实时距离值并反馈至控制器与预设的报警距离值作比较,当实时距离值异常时可通过控制器控制报警器发出报警信号,有利于及时地对基坑两侧的水平位移量进行监测,使得基坑施工更加安全。
21.综上所述,本技术包括以下至少一种有益技术效果:1.通过驱动机构、激光测距仪以及报警器三者均与控制器电性连接,使得控制器可以通过控制驱动机构带动激光测距仪循环测量每组反射板至激光测距仪的实时距离值并进其反馈至控制器,若实时距离值大于报警距离值则由反馈给报警器并发出报警信号提醒施工方,以此实现深基坑水平位移的连续监测,有利于及时地检测基坑的水平位移;2.通过驱动板设置有主齿轮且主齿轮与齿条啮合,通过主驱动件驱动主齿轮正转或反转,便可实现连接杆沿着导向杆进行往复移动,使得连接杆与激光测距仪的往复移动更加简单方便;3.通过反射板顶端与安装杆远离安装板的一端铰接,使得反射板可以始终保持竖直状态,使得测距仪可以更准确得反射板的实时位置,从而使得反射板的位移量更加准确。
附图说明
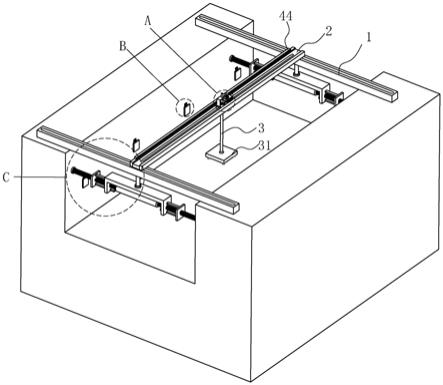
22.图1是本技术实施例的整体结构示意图;图2是本技术实施例用于示意激光测距仪与配重板示意图;图3是本技术实施例用于示意配重板与连接杆的剖切示意图;图4是图1中a部的放大示意图;图5是图1中b部的放大示意图;图6是图1中c部的放大示意图;图7是本技术实施用于两组横梁杆与导向杆折叠时的示意图。
23.附图标记说明:
1、横梁杆;10、滑移通孔;2、导向杆;21、滑槽;22、长条通孔;23、转杆;24、水平板;241、固定板;25、螺纹套筒;26、螺杆;261、限位板;262、限位杆;3、连接杆;30、滑孔;31、配重板;310、铰接槽;32、限位框;321、锁紧部;33、激光测距仪;35、驱动杆;351、卡接条;34、橡胶块;36、气缸;4、驱动机构;41、驱动板;411、机架;42、主齿轮;43、驱动件;44、齿条;5、副齿轮;6、反射板;61、安装杆;62、安装板。
具体实施方式
24.以下结合附图1-7对本技术作进一步详细说明。
25.本技术实施例公开一种深基坑水平位移连续检测系统,参照图1及图2,包括控制器、报警器,导向杆2以及若干反射板6;导向杆2架设在基坑上方且导向杆2长度方向与基坑的长度方向平行,若干反射板分别安装在基坑相对的两侧壁上,导向杆2垂直设置有连接杆3,连接杆3底端设置有激光测距仪33;导向杆2还设置有驱动连接杆3沿导向杆2长度方向往复移动的驱动机构4,驱动机构4还设置有拥有驱动连接杆3转动的转动组件。驱动机构4、激光测距仪33以及报警器三者均与控制器电性连接,控制器用于将用于将反射板6与激光测距仪33实时距离值和预设的报警距离值对比并将反馈结果反馈给报警器,当反射板6与激光测距仪33实时距离值大于预设的报警距离值时,报警器发出报警信号。
26.在本实施例中,报警器为蜂鸣报警器,控制器包括用于控制驱动机构4的电控单元、用于将反射板6与激光测距仪33实时距离和预设的报警距离值进行比较的比较单元以及用于将信号反馈给报警器的反馈单元。
27.参照图2及图3,连接杆3底端呈球状设置,连接杆3底端还设置有配重板31,配重板31与连接杆3底端球绞连接,配重板31上表面设置有用于供连接杆3底端嵌入的铰接槽310;配重板31底侧还固定有用于供激光测距仪33插入的限位框32,限位框32还设置有用于限制激光测距仪33滑移的锁紧部321。配重板31、限位框32、激光测距仪33以及锁紧部321四者的中心位于连接杆3轴线的正下方,使得配重板31与激光测距仪33可以始终保持水平状态,有利于减少施工震动等导致激光测距仪33在测量过程中发生倾斜,影响激光测距仪33测量精度的情况。
28.参照图2及图3,连接杆3底端开设有滑孔30,滑孔30内滑动卡接有橡胶块34,连接杆3还设置有驱使橡胶块34升降的升降组件,当使配重板31与连接杆3一同转动时,可通过升降组件驱使橡胶块34向下滑动直至橡胶块34与铰接槽310内壁抵接,便可使连接杆3带动配重板31一同转动,从而实现激光测距仪33与连接杆3一同转动。当需要使激光测距仪33保持水平状态时,通过升降组件驱使橡胶块34向上滑动直至橡胶块34离开铰接槽310内壁,便可恢复连接杆3与配重板31的球绞连接,从而便于激光测距仪33保持水平。
29.参照图2及图3,升降组件包括固定连接在固定块顶端的驱动杆35,驱动杆35穿设于连接杆3,连接杆3还开设有供驱动杆35穿设的穿孔,穿孔与滑孔30同轴连通,驱动杆35外壁固定有卡接条351,卡接条351与驱动杆35平行设置,穿孔开设有供卡接条351嵌入的卡接槽,使得连接杆3可以带动驱动杆35一同转动,升降组件还包括安装在连接杆3顶端的气缸36,气缸36的活塞杆端部与驱动杆35顶端同轴固定连接。
30.参照图2及图3,锁紧部321包括螺纹穿设于限位框32侧壁的锁紧螺栓,锁紧螺栓伸入限位框32内并与激光测距仪33抵紧,使得激光测距仪33转动过程中不易从限位框32内甩
出。
31.参照图1及图4,驱动机构4包括滑动卡接于导向杆2上的驱动板41,驱动板41开设有供导向杆2滑动卡接的滑槽21,滑槽21的长度方向与导向杆2的长度方向平行;连接杆3穿设于驱动板41与滑槽21,滑槽21底部开设有供连接杆3穿设的长条通孔22,长条通孔22的长度方向与导向杆2的长度方向平行。驱动板41上表面垂直转动连接有主齿轮42,导向杆2的一侧还固定有齿条44,齿条44与主齿轮42啮合设置,齿条44与滑槽21两者的长度方向平行,驱动板41固定有机架411,机架411安装有用于驱动主齿轮42转动的驱动件43,在本实施例中,驱动件43为电机,电机输出轴与主齿轮42同轴固定连接。利用驱动件43驱动主齿轮42正反转便可带动连接杆3以及激光测距仪33沿导向杆2往复移动。
32.参照图1及图4,转动组件包括副齿轮5,副齿轮5同轴固定连接于连接杆3顶端且副齿轮5位于驱动板41上表面,副齿轮5与主齿轮42啮合设置,使得驱动件43驱动主齿轮42转动的同时还可带动副齿轮5转动,从而实现激光测距仪33沿导向杆2长度方向移动的同时还可进行转动。
33.参照图1及图4,基坑侧壁上的若干反射板6沿基坑侧壁的长度方向均匀分布,基坑相对的两侧壁上的反射板6相错设置。反射板6与激光测距仪33位于同一水平面。通过基坑相对两侧壁上的反射板6相错设置,使得激光测距仪33每转动一定角度后便可与基坑一侧侧壁上的反射板6相对,便于激光测距仪33更好地测量基坑相对两侧壁上的反射板6的位置。
34.参照图4及图5,反射板6顶端设置有安装板62,安装板62垂直固定有安装杆61,安装杆61沿长度方向远离安装板62的一端与反射板6铰接,反射板6的回转轴线水平设置,安装板62通过锚固螺栓固定在基坑侧壁。通过反射板6顶端铰接于安装杆61,使得反射板6那可以通过重力保持竖直向下的状态,从而使得反射板6不易发生倾斜,便于激光测距仪33更好地测量。
35.参照图6及图7,导向杆2两端均设置有横梁杆1,横梁杆1横跨基坑上方并与地面抵接,导向杆2两端均垂直向下转动连接有转杆23,导向杆2两端的转杆23分别与两组横梁杆1一一对应,转杆23穿设于对应的横梁杆1,横梁杆1开设有用于供转杆23穿设的滑移通孔10,滑移通孔10与横梁杆1两者长度方向平行设置。通过以上设置,导向杆2可以架设在两组横梁杆1上,使得导向杆2更加稳固地架设在基坑上;同时,往相互靠近的方向移动两组横梁杆1,便可实现将两组横梁杆1与导向杆2进行折叠收纳,有利于节省收纳空间。
36.参照图6及图7,导向杆2还设置有用于限制自身与基坑保持相对固定的限位组件,限位组件包括固定在转杆23底端的水平板24,水平板24与转杆23的连接处位于水平板24上表面的中心位置,水平板24两端均垂直向下固定连接有固定板241,水平板24底侧还设置有螺纹套筒25,螺纹套筒25两端分别朝向两组固定板241;螺纹套筒25两端的螺纹反向设置,螺纹套筒25两端均螺纹连接有螺杆26,螺纹套筒25两端的螺杆26分别垂直穿设于两组固定板241。
37.参照图1及图7,螺杆26均垂直设置有限位板261,限位板261上垂直设置有限位杆262,限位杆262的长度方向与螺杆26的轴线方向平行;限位杆262穿设于固定板241,使得螺纹套筒25转动时,螺杆26不随之转动。架设导向杆2时,先将两组横梁杆1横跨基坑上方并与地面抵接,然后摆动水平板24使得两组螺杆26分别与基坑相对两内壁相对,转动螺纹套筒
25,使得两组螺杆26伸出,当两组螺杆26分别与基坑相对内壁抵接时,便可实现导向杆2与基坑的相对固定;同时,通过两组螺杆26分别与基坑相对两内壁抵接,还可使导向杆2与基坑两者长度方向相同。
38.一种深基坑水平位移连续监测系统的监测方法:s1:通过控制器控制驱动机构4与转动组件带动激光测距仪33测量每组反射板6与激光测距仪33的初始距离值;测量过程中待激光测距仪33与反射板6正对后才进行测量,确保激光测距仪33的测量精度。
39.s2:根据每组反射板6与激光测距仪33的初始距离值在控制器的比较单元中设置每组反射板6的报警距离值;设置报警距离值应考虑施工现场的震动因素以及基坑的土质因素。
40.s3:通过控制器控制驱动机构4与转动组件带动激光测距仪33循环测量每组反射板6与激光测距仪33的实时距离值;激光测距仪33测量完一组反射板6后,应暂停移动激光测距仪33并将该组反射板6与激光测距仪33的实时距离传入控制器的比较单元中。
41.s4:比较单元将激光测距仪33与反射板6的实时距离值和该组反射板6的报警距离值进行比较,若反射板6与激光测距仪33的实时距离值大于该组反射板6的报警距离值,则继续重复步骤s3,由控制器继续控制驱动机构4与转动组件控制激光测距仪33测量其他组的反射板6;若反射板6与激光测距仪33的实时距离值小于该组反射板6的报警距离值,则通过控制器的反馈单元将信号反馈给报警器并由报警器发出报警信号,以提醒施工方作出相对措施。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。