1.本发明属于水利工程技术领域,具体涉及一种沟渠整平装置及其使用方法。
背景技术:
2.水利工程需要修建坝、堤、溢洪道、渠道等不同类型的水工建筑物,以实现其目标;在农业活动进行中需要修建水渠,用以通水灌溉,在修建水渠时,需要对沟渠地面进行整平,由于部分沟渠宽度小,传统的整平压实设备体积大不能在这种沟渠内作业,因此现阶段此种类型的沟渠还采用人工手动整平和压实,整平压实效果差、耗时长、工人劳动强度大。
技术实现要素:
3.为了解决上述现有技术中存在的问题,提供了一种沟渠整平装置及其使用方法。
4.本发明解决其技术问题所采用的技术方案是:
5.本技术方案提出了一种沟渠整平装置,包括机身,所述机身上转动连接有沟槽凸轮,沟槽凸轮连接有驱动沟槽凸轮旋转的驱动装置,驱动装置与机身相连;所述沟槽凸轮开设有六个回转槽,分别为沿周向方向依次布置的第一回转槽、第二回转槽、第三回转槽、第四回转槽、第五回转槽以及第六回转槽;其中,所述回转槽包括首尾相连的螺旋段、圆弧段以及连接段;圆弧段的尾端与螺旋段首端相连,螺旋段尾端与连接段首端相连,连接段的尾端与圆弧段的首端相连,形成所述回转槽;所述圆弧段的首端与螺旋段的尾端呈上下布置;所述回转槽内滑动连接有滑动键,所述滑动键沿着回转槽相对滑动;所述架体上连接有六个u型支架,分别设置在机身中心线两侧;每一侧各设置有三个u型支架,每个所述u型支架各自铰接有一连杆,六根连杆的一端分别与各自对应的滑动键相连;六根连杆的另一端分别活动连接有上下移动杆,所述上下移动杆的底端各自连接有整平板,整平板置于机身下方;每一根所述的上下移动杆各套设连接有滑套,所述滑套与所述机身相连,所述上下移动杆沿滑套上下移动;所述整平板包括设置在机身一侧的第一平板、第三平板以及第五平板,还包括设置在机身另一侧的第二平板、第四平板以及第六平板;其中,第一平板与第一回转槽对应设置,第二平板与第二回转槽对应设置,第三平板与第三回转槽对应设置;第四平板与第回转槽对应设置;第五平板与第五回转槽对应设置,第六平板与第六回转槽对应设置;第一平板、第四平板以及第五平板作为第一组板,第二平板、第三平板以及第六平板作为第二组板。
6.所述机身两侧连接有导轨,所述滑套的外壁连接有滑块,所述滑块与所述导轨滑动连接;所述回转槽倾斜设置。
7.所述连杆与上下移动杆之间连接有第二万向轴承。
8.所述连杆与u型支架之间安装有第一万向轴承。
9.所述滑动键连接有短接杆,所述短接杆与所述连杆相连。
10.一种沟渠整平装置的使用方法,包括如下步骤:
11.在进行整平时,启动驱动装置,驱动装置带动沟槽凸轮转动,沟槽凸轮在转动时,
回转槽会带动滑动键相对移动,当滑动键从螺旋段首端相对移动至螺旋段尾端时,由于螺旋段首端至尾端是向靠近沟槽凸轮轴线方向移动的,所以滑动键相对下移,进而带动连杆绕u型支架转动,连杆带动上下移动杆上移,进而带动整平板上移;当滑动键移动至连接段时,滑动键相对上移,进而带动连杆绕u型支架反向转动,连杆带动上下移动杆快速下落,整平板快速砸向地面,当滑动键移动至圆弧段时,由于圆弧段不存在半径的变化,滑动键在圆弧段中不会发生上下位置的改变,在此过程中,整平板会支撑于地面上;随着沟槽凸轮的转动,整平板按照“提升
‑‑
砸地夯实
‑‑
保持支撑”的方式,不断实现地面夯实整平;当第一组板中的第一平板以及第五平板支撑于地面时,对应的第二组板中的第二平板以及第六平板也支撑于地面,第三平板以及第四平板处于悬空状态;当第三平板以及第四平板支撑地面时,第一平板以及第五平板处于悬空,第二平板以及第六平板也处于悬空,第一组板与第二组板中各板交替悬空-夯实,实现了地面整平。
12.一种沟渠整平装置的另一使用方法,包括如下步骤:
13.在进行整平时,启动驱动装置,驱动装置带动沟槽凸轮转动,沟槽凸轮在转动时,回转槽会带动滑动键相对移动,当滑动键从螺旋段首端相对移动至螺旋段尾端时,由于螺旋段首端至尾端是向靠近沟槽凸轮轴线方向移动的,所以滑动键相对下移,进而带动连杆绕u型支架转动,连杆带动上下移动杆上移,进而带动整平板上移;当滑动键移动至连接段时,滑动键相对上移,进而带动连杆绕u型支架反向转动,连杆带动上下移动杆快速下落,整平板快速砸向地面,当滑动键移动至圆弧段时,由于圆弧段不存在半径的变化,滑动键在圆弧段中不会发生上下位置的改变,在此过程中,整平板会支撑于地面上;随着沟槽凸轮的转动,整平板按照“提升
‑‑
砸地夯实
‑‑
支撑”的方式,不断实现地面夯实整平;另外,由于回转槽是倾斜设置的,在沟槽凸轮旋转过程中,连杆还会发生左右摆动;当第一组板中的第一平板以及第五平板支撑于地面时,对应的第二组板中的第二平板以及第六平板也支撑于地面,第三平板以及第四平板处于悬空状态;且第一平板、第二平板、第五平板以及第六平板所对应的连杆倾斜方向一致,第三平板以及第四平板所对应的连杆倾斜方向一致;由于第一平板、第二平板、第五平板以及第六平板支撑于地面,在沟槽凸轮转动过程中,在相对力的作用下,机身相对地面会移动,进而实现了夯实自行走动作;
14.当第三平板以及第四平板支撑地面时,第一平板以及第五平板处于悬空,第二平板以及第六平板也处于悬空,在沟槽凸轮转动过程中,在相对力的作用下,机身相对地面会移动,进而实现了夯实自行走动作;第一组板与第二组板中各板交替悬空-夯实,并能自行走,实现了地面自行走整平。
15.与现有技术相比,本发明具有以下优点:
16.1.本发明通过设置沟槽凸轮,并在沟槽凸轮上开设有回转槽,回转槽包括首尾相连的螺旋段、圆弧段以及连接段;沟槽凸轮在转动时,回转槽会带动滑动键相对移动,当滑动键从螺旋段首端相对移动至螺旋段尾端时,由于螺旋段首端至尾端是向靠近沟槽凸轮轴线方向移动的,所以滑动键相对下移,进而带动连杆绕u型支架转动,连杆带动上下移动杆上移,进而带动整平板上移;当滑动键移动至连接段时,滑动键相对上移,进而带动连杆绕u型支架反向转动,连杆带动上下移动杆快速下落,整平板快速砸向地面,当滑动键移动至圆弧段时,由于圆弧段不存在半径的变化,滑动键在圆弧段中不会发生上下位置的改变,在此过程中,整平板会支撑于地面上;随着沟槽凸轮的转动,整平板按照“提升
‑‑
砸地夯实
‑‑
保
持支撑”的方式,不断实现地面夯实整平。本装置结构简单、设计巧妙,采用仿生腿的结构形式,类似于人工用脚不断踩压的方式,实现了地面的夯实整平,且具有整平压实效果好、简便快速的优点,降低了工人劳动强度。
17.2.本装置中通过将回转槽倾斜设置以及滑套连接有滑块,滑轨与机身的滑轨相连,还可以实现连杆的摆动,在相对力的作用下,机身会移动,进而实现了整个装置的自行走。
附图说明
18.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
19.图1是本发明实施例一结构俯视图。
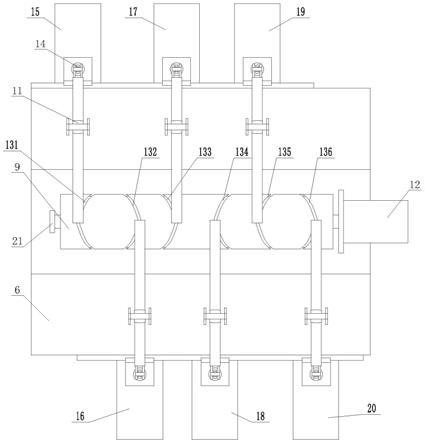
20.图2是本发明结构侧视剖视图。
21.图3是回转槽结构示意图。
22.图4是本发明实施例二结构俯视图。
23.图5是本发明实施例二主视方向剖视图(省略连杆)。
24.图6是本发明自行走状态结构示意图。
25.附图标记说明:
26.1整平板;2上下移动杆;3滑套;4导轨;5滑块;6机身;7连杆;71短接杆;8u型支架;9沟槽凸轮;10滑动键;11第一万向轴承;12电机;13回转槽;131第一回转槽;132第二回转槽;133第三回转槽;134第四回转槽;135第五回转槽;136第六回转槽;14第二万向轴承;15第一平板;16第二平板;17第三平板;18第四平板;19第五平板;20第六平板;21轴支架;1301螺旋段;1302连接段;1303圆弧段。
具体实施方式
27.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
28.实施例一
29.如图1-3所示,本实施例提出了一种沟渠整平装置,包括机身6,机身6上转动连接有沟槽凸轮9,机身6上设置有轴支架21,沟槽凸轮9与轴支架21转动连接;沟槽凸轮9连接有驱动沟槽凸轮9旋转的驱动装置,驱动装置与机身6相连,驱动装置可以选用电机12或汽油机或柴油机;沟槽凸轮9开设有六个回转槽13,分别为沿周向方向依次布置的第一回转槽131、第二回转槽132、第三回转槽133、第四回转槽134、第五回转槽135以及第六回转槽136。
30.其中,回转槽13的具体结构包括首尾相连的螺旋段1301、圆弧段1303以及连接段1302;圆弧段1303的尾端与螺旋段1301首端相连,螺旋段1301尾端与连接段1302首端相连,连接段1302的尾端与圆弧段1303的首端相连,形成所述回转槽13;连接段1302为一直线段;圆弧段1303的首端与螺旋段1301的尾端呈上下布置;回转槽13内滑动连接有滑动键10,滑动键10相对沿着回转槽13转动,但是滑动键10无法从回转槽13中脱离;架体上连接有六个u型支架8,分别设置在机身6中心线两侧;每一侧各设置有三个u型支架8,每个u型支架8各自
铰接有一连杆7,六根连杆7的一端分别与各自对应的滑动键10相连;六根连杆7的另一端分别活动连接有上下移动杆2,上下移动杆2的底端各自连接有整平板1,整平板1置于机身6下方,充分利用空间,更好的完成整平工作;每一根所述的上下移动杆2各套设连接有滑套3,滑套3与机身6相连,上下移动杆2沿滑套3上下移动;连杆7可带动上下移动杆2上下移动;整平板1包括设置在机身6一侧的第一平板15、第三平板17以及第五平板19,还包括设置在机身6另一侧的第二平板16、第四平板18以及第六平板20;其中,第一平板15与第一回转槽131对应设置,第二平板16与第二回转槽132对应设置,第三平板17与第三回转槽133对应设置;第四平板18与第回转槽13对应设置;第五平板19与第五回转槽135对应设置,第六平板20与第六回转槽136对应设置;第一平板15、第四平板18以及第五平板19作为第一组板,第二平板16、第三平板17以及第六平板20作为第二组板。
31.为了更方便的连接滑动键10,滑动键10连接有短接杆71,短接杆71与连杆7相连。
32.上述的沟渠整平装置的使用方法,包括如下步骤:
33.本装置的原理:在进行整平时,启动驱动装置,驱动装置带动沟槽凸轮9转动,沟槽凸轮9在转动时,回转槽13会带动滑动键10相对移动,当滑动键10从螺旋段1301首端相对移动至螺旋段1301尾端时,由于螺旋段1301首端至尾端是向靠近沟槽凸轮9轴线方向移动的,所以滑动键10相对下移,进而带动连杆7绕u型支架8转动,连杆7带动上下移动杆2上移,进而带动整平板1上移;当滑动键10移动至连接段1302时,滑动键10相对上移,进而带动连杆7绕u型支架8反向转动,连杆7带动上下移动杆2快速下落,整平板1快速砸向地面,当滑动键10移动至圆弧段1303时,由于圆弧段1303不存在半径的变化,滑动键10在圆弧段1303中不会发生上下位置的改变,在此过程中,整平板1会支撑于地面上;随着沟槽凸轮9的转动,整平板1按照“提升
‑‑
砸地夯实
‑‑
支撑”的方式,不断实现地面夯实整平;依据上述原理,通过调整回转槽的设置方式,满足:当第一组板中的第一平板15以及第五平板19支撑于地面时,对应的第二组板中的第二平板16以及第六平板20也支撑于地面,第三平板17以及第四平板18处于悬空状态;当第三平板17以及第四平板18支撑地面时,第一平板15以及第五平板19处于悬空,第二平板16以及第六平板20也处于悬空,第一组板与第二组板中各板交替悬空-夯实,实现了地面整平。
34.实施例二
35.如图4-6所示,在实施例一的基础上,本实施例提出了一种沟渠整平装置,机身6两侧连接有导轨4,滑套3的外壁连接有滑块5,滑块5与导轨4滑动连接;回转槽13倾斜设置。
36.连杆7与上下移动杆2之间连接有第二万向轴承14。连杆7与u型支架8之间安装有第一万向轴承11。
37.滑套3可沿着导轨4进行滑动,进而实现整平板1的前后摆动。
38.本实施例中的沟渠整平装置的使用方法,包括如下步骤:
39.在进行整平时,启动驱动装置,驱动装置带动沟槽凸轮9转动,沟槽凸轮9在转动时,回转槽13会带动滑动键10相对移动,当滑动键10从螺旋段1301首端相对移动至螺旋段1301尾端时,由于螺旋段1301首端至尾端是向靠近沟槽凸轮9轴线方向移动的,所以滑动键10相对下移,进而带动连杆7绕u型支架8转动,连杆7带动上下移动杆2上移,进而带动整平板1上移;当滑动键10移动至连接段1302时,滑动键10相对上移,进而带动连杆7绕u型支架8反向转动,连杆7带动上下移动杆2快速下落,整平板1快速砸向地面,当滑动键10移动至圆
弧段1303时,由于圆弧段1303不存在半径的变化,滑动键10在圆弧段1303中不会发生上下位置的改变,在此过程中,整平板1会支撑于地面上;随着沟槽凸轮9的转动,整平板1按照“提升
‑‑
砸地夯实
‑‑
支撑”的方式,不断实现地面夯实整平;另外,由于回转槽13是倾斜设置的,在沟槽凸轮9旋转过程中,连杆7还会发生左右摆动;当第一组板中的第一平板15以及第五平板19支撑于地面时,对应的第二组板中的第二平板16以及第六平板20也支撑于地面,第三平板17以及第四平板18处于悬空状态;且第一平板15、第二平板16、第五平板19以及第六平板20所对应的连杆7倾斜方向一致,第三平板17以及第四平板18所对应的连杆7倾斜方向一致;由于第一平板15、第二平板16、第五平板19以及第六平板20支撑于地面,在沟槽凸轮9转动过程中,在相对力的作用下,机身6相对地面会移动,进而实现了夯实自行走动作;
40.当第三平板17以及第四平板18支撑地面时,第一平板15以及第五平板19处于悬空,第二平板16以及第六平板20也处于悬空,在沟槽凸轮9转动过程中,在相对力的作用下,机身6相对地面会移动,进而实现了夯实自行走动作;第一组板与第二组板中各板交替悬空-夯实,并能自行走,实现了地面自行走整平。
41.通过以上两个实施例可以看出:
42.本发明通过设置沟槽凸轮9,并在沟槽凸轮9上开设有回转槽13,回转槽13包括首尾相连的螺旋段1301、圆弧段1303以及连接段1302;沟槽凸轮9在转动时,回转槽13会带动滑动键10相对移动,当滑动键10从螺旋段1301首端相对移动至螺旋段1301尾端时,由于螺旋段1301首端至尾端是向靠近沟槽凸轮9轴线方向移动的,所以滑动键10相对下移,进而带动连杆7绕u型支架8转动,连杆7带动上下移动杆2上移,进而带动整平板1上移;当滑动键10移动至连接段1302时,滑动键10相对上移,进而带动连杆7绕u型支架8反向转动,连杆7带动上下移动杆2快速下落,整平板1快速砸向地面,当滑动键10移动至圆弧段1303时,由于圆弧段1303不存在半径的变化,滑动键10在圆弧段1303中不会发生上下位置的改变,在此过程中,整平板1会支撑于地面上;随着沟槽凸轮9的转动,整平板1按照“提升
‑‑
砸地夯实
‑‑
保持支撑”的方式,不断实现地面夯实整平。本装置结构简单、设计巧妙,采用仿生腿的结构形式,类似于人工用脚不断踩压的方式,实现了地面的夯实整平,且具有整平压实效果好、简便快速的优点,降低了工人劳动强度。
43.本装置中通过将回转槽13倾斜设置以及滑套3连接有滑块5,滑轨与机身6的滑轨相连,还可以实现连杆7的摆动,在相对力的作用下,机身6会移动,进而实现了整个装置的自行走。
44.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。