1.本实用新型涉及坡面混凝土施工技术领域,尤其涉及一种坡面混凝土施工车。
背景技术:
2.在进行诸如护坡,水利灌溉渠道等施工时,需要沿线浇筑大量的坡面混凝土,通常采用人工振捣抹面。由于坡面混凝土通常设置的较薄,加之无论是护坡还是渠道,线路都很长,导致坡面混凝土体积不大但面积很大,人工振捣抹面工程量十分巨大。
3.当前,在进行坡面混凝土施工时,通常采用人工振捣抹面的方式,机械化程度不高,而且工人在坡面上操作不便,施工效率较低,且施工质量降低。有部分施工采用机械化的浇筑装置,但这些装置通常由于结构受力原因需要设置很大的上部承载构造,且行走不便,设备进出场及安拆周转不便。
技术实现要素:
4.为解决上述问题,本实用新型提出一种坡面混凝土施工车,具体技术方案为:
5.一种坡面混凝土施工车,包括滚杠、一对斜向伸缩臂和带有操作平台的牵引设备,所述操作平台的两端均设置有横向伸缩臂,所述横向伸缩臂的前端均设置有转向电机,所述斜向伸缩臂可转动地设置于转向电机的驱动端上,所述滚杠的两端分别可转动地设置于两个斜向伸缩臂的前端,所述操作平台上设置有控制台。
6.进一步地,所述转向电机的驱动端上设置有用于检测斜向伸缩臂倾斜角度的角度传感器。
7.进一步地,所述横向伸缩臂、斜向伸缩臂上均设置有电动齿轮。
8.进一步地,所述操作平台的两侧均设置有一对可向外移出的支腿。
9.有益效果:
10.本实用新型的施工车行走与振捣抹面为一体结构,实现了振捣抹平的全机械化,提高了坡面混凝土浇筑质量,同时,施工车具有行走方便、使用灵活、周转便利无需拼装的优点。
附图说明
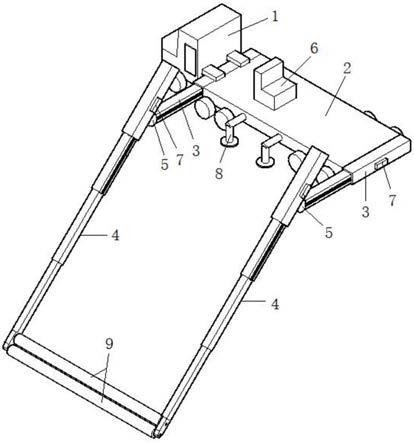
11.图1为本实用新型工作状态的整体示意图。
12.图2为本实用新型行走状态的整体示意图。
13.图中:1牵引设备,2操作平台,3横向伸缩臂,4斜向伸缩臂,5转向电机,6控制台,7电动齿轮,8支腿,9滚杠。
具体实施方式
14.下面结合附图和具体实施例对本实用新型做进一步描述:
15.如图1、2所示,一种坡面混凝土施工车,包括滚杠9、一对斜向伸缩臂4和带有操作
平台2的牵引设备1,所述操作平台2的两端均设置有横向伸缩臂3,所述横向伸缩臂3的前端均设置有转向电机5,所述斜向伸缩臂4可转动地设置于转向电机5的驱动端上,所述滚杠9的两端分别可转动地设置于两个斜向伸缩臂4的前端,所述操作平台2上设置有控制台6。
16.其中,所述滚杠9对坡面上浇筑的混凝土进行振捣抹面提浆压实,也可设置多根可转动的滚杠9,从而有效地保障混凝土的成型质量。所述牵引设备1可采用和汽车吊类似的构造,在提供牵引的同时给施工车的各部件提供动力。
17.如图2所示,所述横向伸缩臂3为液压驱动的两级伸缩臂,所述斜向伸缩臂4为液压驱动的多级伸缩臂;所述横向伸缩臂3、斜向伸缩臂4的第一级伸缩臂上均设置有电动齿轮7,第二级伸缩臂与第一级伸缩臂采用内外齿啮合的结构,从而使电动齿轮7控制第二级伸缩臂向第一级伸缩臂内最大可能地回缩,减少施工车行走时的占用空间。
18.本实施例中,所述转向电机5的驱动端上设置有用于检测斜向伸缩臂4倾斜角度的角度传感器。所述转向电机5的驱动端驱动斜向伸缩臂4转动,从而可利用角度传感器检测到其倾斜角度;根据坡面的坡度及混凝土浇筑厚度,通过控制台6可调整斜向伸缩臂4至所需的角度。
19.优选地,所述操作平台2的两侧均设置有一对可向外移出的支腿8;当施工车开始工作前,把各个所述支腿8向外移出,支腿8底部垫上枕木,从而防止使工作发生倾覆。
20.具体地,所述控制台6作为操控中心,可控制横向伸缩臂3、斜向伸缩臂4的伸缩,控制转向电机5的启停,并通过设定倾斜角度来使转向电机5控制斜向伸缩臂4的转动位置,以及控制电动齿轮7的启停;所述支腿8也可以设置成液压控制的形式,其也可由控制台6进行控制。
21.使用时,把施工车牵引至施工现场的坡顶,架设好各个支腿8,根据施工坡面的坡度和浇筑混凝土的厚度,计算出需要设定的倾斜角度;把横向伸缩臂3伸出至合适的位置,根据设定的倾斜角度调整斜向伸缩臂4的位置,并控制斜向伸缩臂4沿坡面向下伸出各级伸缩臂,使滚杠9处于坡面的坡底位置;开始浇筑混凝土,利用滚杠9对混凝土进行振捣抹面提浆压实,并随着浇筑面的上升把斜向伸缩臂4缓慢回缩至坡顶。缩回支腿8和横向伸缩臂3,启动电动齿轮7,使斜向伸缩臂4、横向伸缩臂3上的第二级伸缩臂继续回缩,此时的滚杠9高于地面,施工车的通过宽度减小,行走至下一浇筑面进行施工,直至所有的坡面混凝土施工完毕。
技术特征:
1.一种坡面混凝土施工车,其特征在于:包括滚杠、一对斜向伸缩臂和带有操作平台的牵引设备,所述操作平台的两端均设置有横向伸缩臂,所述横向伸缩臂的前端均设置有转向电机,所述斜向伸缩臂可转动地设置于转向电机的驱动端上,所述滚杠的两端分别可转动地设置于两个斜向伸缩臂的前端,所述操作平台上设置有控制台。2.根据权利要求1所述的一种坡面混凝土施工车,其特征在于:所述转向电机的驱动端上设置有用于检测斜向伸缩臂倾斜角度的角度传感器。3.根据权利要求1所述的一种坡面混凝土施工车,其特征在于:所述横向伸缩臂、斜向伸缩臂上均设置有电动齿轮。4.根据权利要求1所述的一种坡面混凝土施工车,其特征在于:所述操作平台的两侧均设置有一对可向外移出的支腿。
技术总结
一种坡面混凝土施工车,其特征在于:包括滚杠、一对斜向伸缩臂和带有操作平台的牵引设备,所述操作平台的两端均设置有横向伸缩臂,所述横向伸缩臂的前端均设置有转向电机,所述斜向伸缩臂可转动地设置于转向电机的驱动端上,所述滚杠的两端分别可转动地设置于两个斜向伸缩臂的前端,所述操作平台上设置有控制台。本实用新型的施工车行走与振捣抹面为一体结构,实现了振捣抹平的全机械化,提高了坡面混凝土浇筑质量,同时,施工车具有行走方便、使用灵活、周转便利无需拼装的优点。用灵活、周转便利无需拼装的优点。用灵活、周转便利无需拼装的优点。
技术研发人员:蒋凯 曲静昊 吴磊
受保护的技术使用者:中国一冶集团有限公司
技术研发日:2021.07.15
技术公布日:2022/1/21