1.本公开涉及动力机器。更具体地,本公开涉及控制动力机器以在全球定位卫星信号不可用的环境中进行自主操作。
背景技术:
2.出于本公开的目的,动力机器包括为完成特定任务或各种任务而生成动力的任何类型的机器。一种类型的动力机器是作业车辆。作业车辆通常是具有诸如升降臂的作业设备(尽管一些作业车辆可以具有其他作业设备)的白推进车辆,所述作业设备可以被操纵以执行作业功能。作业车辆包括装载机、挖掘机、多用途车辆、拖拉机和挖沟机,仅举几个例子。
3.全球定位系统是由利用卫星传输的信号通过计算来自不同卫星的信号到达接收器的时间差来确定接收器的纬度和经度的卫星、计算机和接收器组成的系统。全球定位系统及其接收器可以用于多种应用,包括动力机器的定位。因为卫星信号不能穿透一些结构,所以全球定位系统通常不能用在建筑物内或障碍物阻碍接收器和卫星之间的视线的其他区域中。
4.以上讨论仅被提供以获得总体性背景信息,并不旨在用于帮助确定所要求保护的主题的范围。
技术实现要素:
5.公开了动力机器和系统,所述动力机器和所述系统被配置为基于动力机器的位置和在gps导航不可用的局部定位环境中的潜在障碍物来提供机器的自主控制或增广控制。
6.所公开的实施例包括诸如装载机的动力机器,以及提供动力机器在全球定位系统信号不可用的局部定位系统环境中的增广控制或自主控制的方法。一个或更多个控制器或计算机的系统可以被配置成通过在系统上安装软件、固件、硬件或它其组合来执行特定操作或动作,其中所述软件、固件、硬件或其组合在操作中导致系统执行这些动作。一个或更多个计算机程序可以被配置成通过包括指令来执行特定的操作或动作,这些指令在被数据处理装置运行时使得所述装置执行这些动作。
7.一个总体方面包括一种提供对动力机器(100;200;300;600)的增广控制的方法(700),该方法包括:使用与动力机器上的标签设备(612)通信的定位控制器(614)辨别(702)局部定位系统环境(604);使用定位控制器辨别(704)动力机器在局部定位系统环境内的当前相对位置;辨别(706)局部定位系统环境内的期望目的地位置(630);辨别(708)局部定位系统环境内的障碍物(620;622;624);部分地基于被辨别的障碍物创建(710)从当前相对位置到期望目的地位置的动力机器路径(634);以及使用(712)增广操作控制器(616)来至少部分自主地控制动力机器,以沿着所创建的动力机器路径从当前相对位置行驶到期望目的地位置。这方面的其他实施例包括各自被配置为执行方法的动作的相对应的计算机系统、装置和记录在一个或更多个计算机存储设备上的计算机程序。
8.实施方式可以包括以下特征中的一个或更多个。在所述方法中,辨别(702)局部定位系统环境(604)还包括辨别动力机器是否已经进入或正在进入局部定位系统环境,并自动停止使用全球定位系统进行导航。
9.在所述方法中,辨别(706)局部定位系统环境内的期望目的地位置(630)包括使用定位控制器(614)和增广操作控制器(616)中的至少一个来辨别期望目的地位置。
10.在所述方法中,辨别(706)期望目的地位置(630)还包括从远离动力机器定位的设备接收期望目的地位置。
11.在所述方法中,辨别(708)局部定位系统环境内的障碍物(620;622;624)还包括使用物体传感器系统(352;652)辨别障碍物。在所述方法中,使用物体传感器系统(352;652)辨别障碍物包括使用具有视频传感器的图像处理系统、雷达系统以及光检测和测距系统中的至少一个来辨别障碍物。
12.在所述方法中,辨别(708)局部定位系统环境内的障碍物(620;622;624)还包括使用手持计算设备辨别障碍物。
13.在所述方法中,使用定位控制器辨别(704)动力机器在局部定位系统环境内的当前相对位置还包括使用定位在局部定位系统环境内的多个定位设备(606;608;610)提供动力机器的实时定位系统的位置确定。
14.一个总体方面包括一种被配置成在局部定位系统环境(604)中通过增广控制进行操作的动力机器(100;200;300;600),该动力机器包括:框架(110;210);动力系统(120;220),该动力系统由框架支撑;牵引系统(140;240),该牵引系统由框架支撑并由动力系统提供动力,以在支撑表面上以能够控的方式推进动力机器;控制系统(160;350),该控制系统具有定位控制器(614)、增广操作控制器(616)和机器控制器(618),该定位控制器被配置成确定动力机器在局部定位系统环境内的位置,该增广操作控制器被配置成提供动力机器的增广控制或至少部分地自主控制,该机器控制器被配置成响应于增广操作控制器来控制动力系统和牵引系统,该控制系统被配置成控制牵引系统以在局部定位系统环境中自动引导动力机器,该控制系统进一步被配置成:在定位控制器(614)与标签设备(612)之间进行通信,以辨别动力机器在局部定位系统环境中的存在,并辨别动力机器在局部定位系统环境内的当前相对位置;辨别局部定位系统环境内的期望目的地位置(630);辨别局部定位系统环境内的障碍物(620;622;624);部分地基于被辨别的障碍物创建从当前相对位置到期望目的地位置的动力机器路径(634);以及使用增广操作控制器(616)和机器控制器(618)来至少部分地自主地控制动力机器,以沿着所创建的动力机器路径从当前相对位置行驶到期望目的地位置。
15.实施方式可以包括以下特征中的一个或更多个。所述动力机器还包括物体传感器系统(352;652),该物体传感器系统被配置成检测局部定位系统环境内的障碍物(620;622;624)并与控制系统通信以帮助辨别障碍物。在所述动力机器中,物体传感器系统(352;652)包括具有视频传感器的图像处理系统、雷达系统以及光检测和测距系统中的至少一个。
16.在所述动力机器中,控制系统进一步被配置成确定动力机器是否已经进入或正在进入局部定位系统环境,并且在处于局部定位系统环境中的同时自动停止使用全球定位系统进行导航。
17.在所述动力机器中,控制系统被配置成通过从远离动力机器或相对于动力机器远
程定位的设备接收期望目的地位置来辨别动力机器的期望目的地位置。
18.在所述动力机器中,控制系统被配置成使用与控制系统通信的手持计算设备来辨别局部定位系统环境内的障碍物。
19.在所述动力机器中,控制系统进一步被配置成使用被定位在局部定位系统环境内的多个定位设备(606;608;610)来辨别动力机器在局部定位系统环境内的当前相对位置,以提供动力机器的实时定位系统的位置确定。
20.提供本概述和摘要是为了以简化的形式介绍将在下面的详细描述中进一步描述的一些概念。本概述不旨在辨别所要求保护的主题的关键特征或必要特征,也不旨在用于帮助确定所要求保护的主题的范围。
附图说明
21.图1是示出可以在上面有利地实施本公开的实施例的代表性动力机器的功能系统的框图。
22.图2至图3示出了可以在上面实施所公开的实施例的呈滑移转向装载机的形式的代表性动力机器的立体图。
23.图4是示出装载机(诸如图2至图3中示出的装载机)的动力系统的部件的框图。
24.图5是一个示例性实施例中的控制系统的部件的图示。
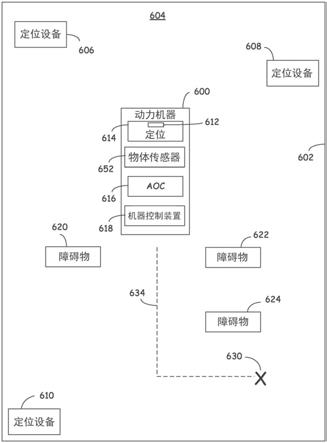
25.图6是被配置成在局部定位系统环境中通过增广控制或自主控制进行操作的动力机器的图示。
26.图7是示出示例性方法实施例的流程图。
27.图8是路径发现、路径生成和目标更新算法的图示。
具体实施方式
28.通过参考示例性实施例来描述和示出在该讨论中公开的构思。然而,这些构思在其应用方面不限于说明性实施例中的部件的构造和布置的细节,并且能够以各种其他方式被实施或执行。本文件中的术语用于描述目的,并且不应视为是限制性的。如本文所用的诸如“包括”、“包含”和“具有”及其变体的词语意在涵括其后列出的项、其等同物以及附加项。
29.公开了动力机器实施例和通过增广操作员控制(augmented operator control,aoc)系统进行操作以为动力机器提供许多特征的方法,包括:在人类操作员驱动车辆的同时记录全球定位系统(gps)或全球导航卫星系统(gnss)坐标的能力;重放预先记录的路径并自动或半自动地控制动力机器沿该路径行进的能力;根据用户输入的坐标列表进行导航的能力;以及自动行驶绕过障碍物的能力。
30.aoc系统的一些实施例基于实时动态(real-time kinematic,rtk)gps或gnss(以下统称为gps)技术。例如,该系统可以包括两个gps接收器:一个固定基站和动力机器上的一个接收器。基站能够通过在高频率下采集gps数据以亚毫米精度确定所述动力机器的位置。同时,基站向移动接收器发送校正数据。通过将该校正数据与来自动力机器自身的接收器的遥测数据进行比较,该动力机器能够以亚厘米精度确定动力机器的位置。然而,虽然aoc系统在支持gps的环境中在室外作业,但是也可以期望利用室内定位技术来实现在不支持gps的环境中对动力机器的自主系统控制。
31.存在多种定位技术来定位室内物体;并且所述室内物体中的大多数利用具有已知位置的一组固定锚(接收器、发射器或收发器)来定位移动标签(接收器、发射器或收发器)。为了定位标签,这些系统利用考虑锚和标签之间的信号传输的动态的不同技术。在这些技术中,到达时间差(time-difference-of-arrival,tdoa)和飞行时间(time-of-flight,tof)是最常用的。tdoa利用不同锚到标签之间的信号到达时间差来获得标签相对于锚的角度。tof使用信号传播时间来计算锚和标签之间的距离。
32.除了室内定位技术之外,在一些实施例中还利用对周围环境的感知来使所公开的支持aoc系统的动力机器真实地响应变化的环境。诸如立体相机、光探测和测距(lidar)以及雷达的传感器是可以使用的传感器类型的示例。虽然非常精确,但是lidar传感器封装件具有高价格和维护成本。另一方面,虽然立体相机比lidar便宜得多,但立体相机需要更复杂的算法来将图像转换为3d模型。
33.这些构思可以在各种动力机器上被实践,如下文将描述的那样。在图1中以图表的形式示出了可以在上面实施所述实施例的代表性动力机器,并且这种动力机器的一个示例在图2至图3中被示出,并且在公开任何实施例之前在以下被描述。为了简洁起见,仅示出并讨论了一个动力机器作为代表性动力机器。然而,如上所提及那样,下面的实施例可以在多个动力机器中的任一个上被实施,包括与图2至图3中示出的代表性动力机器不同类型的动力机器。出于本讨论的目的,动力机器包括框架、至少一个作业元件和能够向作业元件提供动力以完成作业任务的动力源。一种类型的动力机器是自推进式作业车辆。自推进式作业车辆是包括框架、作业元件和能够向作业元件提供动力的动力源一种作业机器。作业元件中的至少一个是用于在动力下使动力机器移动的原动系统。
34.图1是示出下面讨论的实施例可以有利地结合在其上的动力机器100的基本系统的框图,该动力机器可以是许多不同类型的动力机器中的任何一种。图1的框图标识动力机器100上的各种系统以及各种部件和系统之间的关系。如上所提及那样,在最基本的层面上,用于本讨论目的的动力机器包括框架、动力源和作业元件。动力机器100具有框架110、动力源120和作业元件130。因为图1中示出的动力机器100是自推进式作业车辆,所以该动力机器还具有牵引元件140和操作员站150,所述牵引元件本身是被设置成用于使动力机器在支撑表面上移动的作业元件,该操作员站提供用于控制动力机器的作业元件的操作位置。控制系统160被设置成与其他系统交互,以至少部分地响应于由操作员提供的控制信号来执行各种作业任务。
35.某些作业车辆具有能够执行专门任务的作业元件。例如,一些作业车辆具有升降臂,诸如铲斗的机具诸如通过销接装置附接到该升降臂。可以操纵作业元件(即升降臂)来定位机具以执行任务。在一些情况下,机具可以相对于作业元件定位,诸如通过相对于升降臂旋转铲斗,以进一步定位机具。在这种作业车辆的正常操作下,铲斗旨在被附接并被使用。这种作业车辆能够通过拆卸机具/作业元件组合并重新组装另一机具来代替原来的铲斗而接受其他机具。然而,其他作业车辆旨在与各种各样的机具一起使用,并且具有机具接口,诸如图1中示出的机具接口170。最基本地,机具接口170是框架110或作业元件130与机具之间的连接机构,该连接机构可以简单地是用于将机具直接附接到框架110或作业元件130的连接点,或者更复杂地,如下所讨论的那样。
36.在一些动力机器上,机具接口170可以包括机具承载件,该机具承载件是可移动地
附接到作业元件的物理结构。机具承载件具有接合特征和锁定特征,以接受多个机具中的任何一个并将所述多个机具中的任何一个固定到作业元件。这种机具承载件的一个特性是,一旦机具被附接到该机具承载件,该机具承载件便被固定到该机具(即,不能相对于机具移动),并且当机具承载件相对于作业元件移动时,机具与机具承载件一起移动。如本文中所使用的术语“机具承载件”不仅仅是枢转连接点,而且是特别地用于接受并被固定到各种不同的机具的专用设备。机具承载件本身可安装到诸如升降臂之类的作业元件130或框架110。机具接口170还可以包括一个或更多个动力源,所述动力源用于向机具上的一个或更多个作业元件提供动力。一些动力机器可以具有带有机具接口的多个作业元件,每个作业元件可以但不必都具有用于接纳机具的机具承载件。一些其他动力机器可以具有带有多个机具接口的作业元件,使得单个作业元件可以同时接受多个机具。这些机具接口中的每一个可以但不必都具有机具承载件。
37.框架110包括物理结构,所述物理结构可以支撑被附接到该框架110或被定位在该框架110上的各种其他部件。框架110可以包括任意数量的单个部件。一些动力机器具有刚性框架。即,该框架的任何部位都不能相对于该框架的另一部位移动。其他动力机器具有能够相对于框架的另一部分移动的至少一个部分。例如,挖掘机可以具有相对于下框架部分旋转的上框架部分。其他作业车辆具有铰接框架,使得框架的一部分相对于另一部分枢转以实现转向功能。
38.框架110支撑动力源120,该动力源被构造成向包括一个或更多个牵引元件140的一个或更多个作业元件130提供动力,并且在一些情况下,该动力源能够经由机具接口170来提供被所附接的机具所使用的动力。来自动力源120的动力可以被直接提供至作业元件130、牵引元件140和机具接口170中的任一者。可替代地,来自动力源120的动力可以被提供至控制系统160,该控制系统又选择性地向能够使用该动力以执行作业功能的元件提供动力。用于动力机器的动力源典型地包括诸如内燃机之类的发动机、和诸如机械变速器或液压系统之类的动力转换系统,该动力转换系统被构造成将来自发动机的输出转换成可被作业元件使用的动力形式。可以将其他类型的动力源结合到动力机器中,所述其他类型的动力源包括电源或通常被称为混合动力源的动力源组合。
39.图1示出了被指定为作业元件130的单个作业元件,但是各种动力机器可以具有任意数量的作业元件。典型地,作业元件附接到动力机器的框架,并且在执行作业任务时可相对于框架移动。另外,牵引元件140是作业元件的特殊情况在于,牵引元件的作业功能通常是使动力机器100在支撑表面上移动。牵引元件140被示出为与作业元件130分离,这是因为许多动力机器具有除了牵引元件之外的额外的作业元件,尽管并非总是这种情况。动力机器可以具有任意数量的牵引元件,所述牵引元件中的一些或全部可以从动力源120接收动力以推进该动力机器100。牵引元件可以是例如履带组件、附接到轴的轮、和类似部件。牵引元件可以安装到框架,使得牵引元件的移动被限制为围绕轴的旋转(使得通过滑移动作来完成转向),或者可替代地,牵引元件枢转地安装到框架以通过使牵引元件相对于框架枢转来完成转向。
40.动力机器100包括操作员站150,所述操作员站包括操作位置,操作员可以从该操作位置控制动力机器的操作。在一些动力机器中,操作员站150由封闭的驾驶室或部分封闭的驾驶室限定。可以实施所公开的实施例的一些动力机器可能没有上述类型的驾驶室或操
作员室。例如,步行自走式装载机可以没有驾驶室或操作员室,而是具有用作操作员站的操作位置,从该操作员站可以正确操作动力机器。更广泛地,除了作业车辆之外,动力机器可以具有不必类似于上面提到的操作位置和操作员室的操作员站。此外,诸如动力机器100和其他的一些动力机器不管是否具有操作员室或操作员位置都可以作为对位于动力机器上的操作员站或与动力机器相邻的操作员站的替代或附加,都能够被远程操作(即,从远程定位的操作员站)。这可以包括如下应用,在该应用中,动力机器的操作员控制的功能中的至少一些功能可以从与联接至动力机器的机具相关联的操作位置被操作。可替代地,对于一些动力机器可以设置远程控制设备(即,远离动力机器和与动力机器联接的任何机具两者),该远程控制设备能够控制动力机器上的操作员控制的功能中的至少一些功能。
41.图2至图3示出了装载机200,该装载机是图1中示出的动力机器类型的一个具体示例,其中可以有利地采用下文所讨论的实施例。装载机200是滑移转向装载机,该滑移转向装载机是具有牵引元件(在这种情况下为四个轮)的装载机,该牵引元件经由刚性轴安装至装载机的框架。此处,术语“刚性轴”是指如下事实:滑移转向装载机200没有可以旋转或转向以帮助该装载机完成转弯的任何牵引元件。取而代之的是,滑移转向装载机具有驱动系统,该驱动系统独立地为装载机每一侧的一个或更多个牵引元件提供动力,使得通过向每一侧提供不同的牵引信号,该机器将往往会在支撑表面上滑移。这些变化的信号甚至可以包括向装载机一侧的牵引元件(一个或更多个)提供动力以使装载机在向前的方向上移动、以及向装载机另一侧的牵引元件(一个或更多个)提供动力以使装载机在相反的方向上运行,使得该装载机将围绕装载机自身印迹为中心的半径进行转弯。术语“滑移转向”传统上是指具有如上所述的以轮作为牵引元件的滑移转向的装载机。然而,应该说明的是,许多履带式装载机即使没有轮也可以通过滑移来完成转弯,并且在技术上也是滑移转向装载机。出于本讨论的目的,除非另有说明,否则术语“滑移转向”不应视为将讨论的范围限制于以轮作为牵引元件的那些装载机。
42.装载机200是图1中广泛示出并如上所论述的动力机器100的一个具体示例。为此,以下描述的装载机200的特征包括与图1中所使用的附图标记大致类似的附图标记。例如,装载机200被描述为具有框架210,就像动力机器100具有框架110一样。滑移转向装载机200在本文被描述为用于提供对理解在其中可以实施以下所述的与履带组件和将履带组件安装到动力机器的安装元件有关的实施例的环境的参考。装载机200不应被认为尤其是对于装载机200在本文已经描述的特征描述的限制,这些特征对于所公开的实施例不是必不可少的,并因此可以被包括或可以不被包括在除了可以有利地实施下文公开的实施例的装载机200之外的动力机器中。除非另外特别说明,否则下文公开的实施例可以在各种动力机器上被实施,且装载机200仅是这些动力机器中的一个。例如,仅举几个示例,下文讨论的概念中的一些或全部概念可以在诸如各种其他装载机、挖掘机、挖沟机和推土机之类的许多其他类型的作业车辆上被实施。
43.装载机200包括支撑动力系统220的框架210,该动力系统能够生成动力或以其他方式提供动力以操作该动力机器上的各种功能。动力系统220以框图形式示出,但是该动力系统220位于框架210内。框架210还支撑由动力系统220提供动力并能够执行各种作业任务的呈升降臂组件230形式的作业元件。由于装载机200是作业车辆,因此框架210还支撑牵引系统240,所述牵引系统240也由动力系统220提供动力并且能够在支撑表面上推进该动力
机器。升降臂组件230继而支撑机具接口270,该机具接口270包括机具承载件272和动力联接器274,其中所述机具承载件272能够接纳各种机具并将所述机具固定到装载机200以用于执行各种作业任务,机具可以联接到所述动力联接器274以将动力选择性地提供给可能连接到装载机的机具。动力联接器274可以提供液压动力源或电动力源或液压动力源和电动力源两者。装载机200包括限定操作员站255的驾驶室250,其中操作员可以从该操作员站255操纵各种控制设备260以使动力机器执行各种作业功能。驾驶室250可以围绕延伸穿过安装件254的轴线向后枢转,以根据维护和修理的需要来提供对动力系统部件的访问。
44.操作员站255包括操作员座椅258和多个操作输入设备,该操作输入设备包括操作员可以操纵以控制各种机器功能的控制杆260。操作员输入设备可以包括按钮、开关、杆、滑块、踏板、和可以是诸如手动操作杆或脚踏板之类的独立设备或结合到手柄或显示面板中的类似设备,包括可编程输入设备。操作员输入设备的致动可以生成电信号、液压信号和/或机械信号形式的信号。响应于操作员输入设备生成的信号被提供至动力机器上的各种部件,以控制动力机器上的各种功能。经由动力机器100上的操作员输入设备被控制的功能中包括对牵引元件219、升降臂组件230、机具承载件272的控制,以及向以能够操作的方式联接至该机具的任何机具提供信号。
45.装载机可以包括人机界面,该人机界面包括设置在驾驶室250中的显示设备,该显示设备用于以操作员可以感知的形式给出与动力机器的操作相关的信息的指示,例如,声音指示和/或视觉指示。声音指示可以被形成蜂鸣、铃铛等形式或通过口头交流来进行。视觉指示可以被形成图形、灯、图标、仪表、字母数字符号等形式。显示器可以专用于提供专用指示,例如警告灯或仪表,或者可以动态地提供可编程信息,包括诸如各种尺寸和功能的监测器之类的可编程显示设备。显示设备可以提供诊断信息、故障排除信息、指导信息、以及帮助操作员对动力机器或联接至该动力机器的机具进行操作的各种其他类型的信息。还可以提供对操作员可能有用的其他信息。诸如步行自走式装载机之类的其他动力机器可以没有驾驶室、操作员室或座椅。通常相对于操作员最适合操纵操作员输入设备的位置来限定在这样的装载机上的操作员位置。
46.能够包括下文讨论的实施例和/或与下文讨论的实施例相互作用的各种动力机器可以具有支撑各种作业元件的各种不同的框架部件。本文讨论的框架210的元件是出于说明性目的而提供的,并且框架210不是可以在其上实施实施例的动力机器可以采用的唯一框架类型。装载机200的框架210包括框架的底架或下部分211和框架的由底架支撑的主框架或上部分212。装载机200的主框架212在一些实施例中例如通过紧固件或通过将底架焊接到主框架而附接到底架211。可选地,主框架和底架可以一体形成。主框架212包括位于主框架的任一侧并且朝向该主框架的后部的一对直立部分214a和214b,所述一对直立部分214a和214b支撑升降臂组件230,并且该升降臂组件230枢转地附接到所述一对直立部分214a和214b。升降臂组件230示例性地销钉连接到直立部分214a和214b中的每一个。出于本讨论的目的,升降臂组件230和直立部分214a和214b上的安装特征以及安装硬件(包括用于将升降臂组件销钉连接到主框架212的销钉)的组合统称为接头216a和216b(一个接头位于每个直立部分214上)。接头216a和216b沿着轴线218对准,使得升降臂组件能够相对于框架210围绕轴线218枢转,如下文所讨论的。其他动力机器可以不包括在框架的任一侧的直立部分,或者可以没有可安装到位于框架的任一侧并朝向框架的后部的直立部分的升降臂组
件。例如,一些动力机器可以具有单个臂,该单个臂安装到动力机器的单侧或安装到动力机器的前端部或后端部。其他机械可以具有包括多个升降臂的多个作业元件,所述升降臂中的每一个都以其自身的配置安装至该机器。框架210还支撑位于装载机200的任一侧上的呈轮219a至219d形式的一对牵引元件。
47.图2至图3所示的升降臂组件230是可以附接到动力机器的许多不同类型的升降臂组件的一个示例,其中所述动力机器例如是装载机200或可以在其上实施本讨论的实施例的其他动力机器。升降臂组件230是所谓的竖直升降臂,这意味着升降臂组件230在装载机200的控制下相对于框架210沿着升降路径237可移动(即,升降臂组件可以被升起和降下),该升降路径237形成大致竖直路径。其他升降臂组件可以具有不同的几何形状,并且可以以各种方式联接到装载机的框架,从而提供与升降臂组件230的径向路径不同的升降路径。例如,其他装载机上的一些升降路径提供径向升降路径。其他升降臂组件可以具有可伸缩部分。其他动力机器可以具有附接到所述动力机器的框架的多个升降臂组件,其中每个升降臂组件都是彼此独立的。除非另有特别说明,否则本讨论中阐述的发明构思均不受联接至具体动力机器的升降臂组件的类型或数量的限制。
48.升降臂组件230具有设置在框架210的相反侧的一对升降臂234。升降臂234中的每一个的第一端部在接头216处枢转地联接到动力机器,并且升降臂中的每一个的第二端部232b在处于如图2所示的降下位置时定位在框架210的前方。接头216朝向装载机200的后部定位,使得升降臂沿着框架210的侧部延伸。当升降臂组件230在最小高度和最大高度之间移动时,升降路径237由升降臂234的第二端部232b的行进路径限定。
49.升降臂234中的每一个都具有第一部分234a和第二部分234b,每个升降臂234的第一部分234a在所述接头216中的一个接头处枢转地联接到框架210,该第二部分234b从与第一部分234a的连接部延伸到升降臂组件230的第二端部232b。升降臂234每一个都联接至横向构件236,该横向构件236附接至第一部分234a。横向构件236为升降臂组件230提供增加的结构稳定性。一对致动器238(所述致动器在装载机200上是被配置成从动力系统220接收加压流体的液压缸)在装载机200的任一侧分别在可枢转接头238a和238b处枢转地联接至框架210和升降臂234两者。致动器238有时被单独统称为升降缸。致动器238的致动(即,伸出和缩回)使升降臂组件230绕接头216枢转,并由此沿着箭头237所示的固定路径被升起和降下。一对控制连杆217中的每一个控制连杆在框架210的任一侧枢转地安装到框架210和升降臂232中的一个升降臂。控制连杆217有助于限定升降臂组件230的固定的升降路径。
50.一些升降臂(最明显的是挖掘机上的升降臂,但也可能是装载机上的升降臂)可以具有可控制以相对于另一段枢转而不是像图2所示的升降臂组件230中的情况那样一致地(即,沿着预定路径)移动的部分。一些动力机器具有带有单个升降臂的升降臂组件,所述升降臂组件例如在挖掘机,甚至在一些装载机和其他动力机器中是已知的。其他动力机器可以具有多个升降臂组件,每个升降臂组件是彼此独立的。
51.机具接口270被设置成紧邻升降臂组件234的第二端部232b。机具接口270包括机具承载件272,该机具承载件能够接受各种不同的机具并将所述机具固定到升降臂230。这样的机具具有被配置成与机具承载件272接合的互补的机器接口。机具承载件272枢转地安装在臂234的第二端部232b处。机具承载件致动器235以可操作的方式联接升降臂组件230和机具承载件272,并且可操作以使机具承载件相对于升降臂组件旋转。机具承载件致动器
235示例性地为液压缸,并且通常被称为摆缸。
52.由于具有能够附接到多个不同机具的机具承载件,因此可以相对容易地完成从一个机具到另一个机具的改变。例如,具有机具承载件的机器可以在机具承载件和升降臂组件之间设置致动器,使得对机具进行移除或附接并不涉及从机具移除或附接致动器,也不涉及从升降臂组件移除或附接机具。机具承载件272提供用于将机具容易地附接到升降臂(或动力机器的其他部分)的安装结构,使得没有机具承载件的升降臂组件没有该安装结构。
53.一些动力机器可以具有机具或附接到该动力机器的机具类设备,例如通过销钉连接到具有倾斜致动器的升降臂,该倾斜致动器还直接联接到机具或机具类结构。这种以可旋转的方式销钉连接到升降臂的机具的常见示例是铲斗,其中一个或更多个摆缸附接到托架,所述托架例如通过焊接或利用紧固件被直接固定到铲斗上。这样的动力机器没有机具承载件,而是在升降臂和机具之间具有直接连接。
54.机具接口270还包括机具动力源274,该机具动力源可用于连接至升降臂组件230上的机具。机具动力源274包括加压液压流体端口,机具可以以可移除的方式联接至该加压液压流体端口。该加压液压流体端口选择性地提供加压液压流体以为机具上的一个或更多个功能或致动器提供动力。机具动力源还可以包括电动源,所述电动源用于为机具上的电致动器和/或电子控制器提供动力。机具动力源274还示例性地包括电导管,该电导管与挖掘机200上的数据总线通信,以允许机具上的控制器与装载机200上的电子设备之间的通信。
55.框架210支撑并且大致包围动力系统220,使得动力系统220的各种部件在图2至图3中不可见。除其他事项之外,图4包括动力系统220的各种部件的图示。动力系统220包括一个或更多个动力源222,所述动力源能够产生和/或存储用在各种机器功能上的动力。在动力机器200上,动力系统220包括内燃机。其他动力机器可以包括发电机、可充电电池、各种其他动力源、或能够为给定的动力机器部件提供动力的动力源的任何组合。动力系统220还包括动力转换系统224,该动力转换系统以可操作的方式联接到动力源222。动力转换系统224继而联接到一个或更多个致动器226,所述致动器能够执行动力机器上的功能。各种动力机器中的动力转换系统可以包括各种部件,包括机械变速器、液压系统和类似部件。动力机器200的动力转换系统224包括一对静液压驱动泵224a和224b,所述一对静液压驱动泵可以选择性地控制,以便向驱动马达226a和226b提供动力信号。驱动马达226a和226b分别又以可操作的方式联接到轴,其中驱动马达226a联接到轴228a和228b,而驱动马达226b联接到轴228c和228d。轴228a至228d又分别联接到牵引元件219a至219d。驱动泵224a和224b可以以机械的方式、以液压的方式和/或电联接到操作员输入设备,以便接收致动信号以用于控制驱动泵。
56.动力机器200中的驱动泵、马达和轴的布置仅仅是这些部件的布置的一个示例。如上文所讨论的,动力机器200是滑移转向装载机,并因此动力机器的每一侧的牵引元件通过单个液压泵的输出、或通过如在动力机器200中的单个驱动马达或通过独立的驱动马达而被一起控制。可能有利的是,可以采用液压驱动泵和马达的各种其他配置和组合。
57.动力机器200的动力转换系统224还包括液压机具泵224c,该液压机具泵也以可操作的方式联接至动力源222。液压机具泵224c以可操作的方式联接至作业致动器回路238c。
作业致动器回路238c包括升降缸238和摆缸235以及用于控制该升降缸238和摆缸235的致动的控制逻辑。控制逻辑响应于操作员输入而选择性地允许致动所述升降缸和/或摆缸。在一些机器中,作业致动器回路还包括用于将加压液压流体选择性地提供给所附接的机具的控制逻辑。控制逻辑响应于操作员的输入而选择性地允许提升缸和/或倾斜缸的致动。在一些机器中,作业致动器回路还包括控制逻辑,以选择性地向附接的机具提供加压液压流体。动力机器200的控制逻辑包括呈串联布置的开放中心3滑阀。滑阀被布置为使升降缸具有优先级,然后是摆缸,以及然后是到所附接的机具的加压流体。
58.出于说明性目的,以上提供了对动力机器100和装载机200的描述,以提供可以在其上实施下文讨论的实施例的说明性环境。尽管所讨论的实施例可以在例如总体由图1的框图中所示的动力机器100描述的动力机器上被实施,并且更具体地在诸如履带式装载机200的装载机上被实施,但是除非另外说明或陈述,否则下文讨论的概念并不旨在将其应用限于以上具体描述的环境。
59.现在参考图5,示出了可以类似于上面讨论的动力机器的动力机器300的一部分的框图。动力机器300具有控制系统350,该控制系统可以利用如下所述的多个控制器来实施,该控制系统被配置为以增广控制模式或自动控制模式引导动力机器,以沿着限定的路径行进和/或执行限定的功能。增广控制可以用于帮助操作员利用动力机器执行作业任务,或者在一些实施例中可以用于在没有操作员帮助的情况下自动执行任务。由此,控制系统或控制器350控制驱动马达354以控制动力机器相对于支撑表面的移动、控制升降致动器356(一个或更多个)以升起和降下升降臂,并控制倾斜致动器358(一个或更多个)以旋转机具承载件。在一些说明性实施例中,控制系统350在实施增广控制时使用来自一个或更多个传感器或传感器系统452的输入来辨别和避免障碍物。例如,可以使用诸如光检测和测距(lidar)传感器系统的传感器或传感器系统、诸如zed立体相机或具有图像识别和处理的其他视频系统的相机系统、rfid定位系统、红外定位系统、3d飞行时间(tof)相机系统等。
60.在一些实施例中,控制系统350可以被分成四个主要部件:定位子系统、障碍物检测子系统、路径规划子系统和机器控制子系统。所有这些系统在图5中被共同表示为控制系统350。定位系统在所公开的实施例中用于在gps卫星信号不可用的环境(例如在建筑物的内部的作业区域中或在阻碍gps信号的可靠接收的其他结构附近)中为动力机器的增广操作员控制提供定位信息。
61.在示例性实施例中,机器人操作系统(ros)是机器人中间件,该机器人中间件有助于硬件和软件之间的容易集成并为系统350的所有四个主要子系统提供链接。在ros驱动的机器人系统中,该系统的特定功能由称为“节点”的小程序执行。不同的节点通过消息发布/订阅系统来彼此通信。这些节点可以向其他节点可以订阅的主题发布数据或信号。类似地,节点也可以订阅其他节点所发布的任何主题。许多节点可以一起分组成可以执行更大的功能的更大的单元(称为“包”)。在示例性公开的实施例中,所有前述子系统形成执行特定作用的单独包。例如,路径规划包包括制定绕过障碍物的路点路径的规划器节点。所述路径规划包还包括单个目标跟踪节点,该单个目标跟踪节点将路点转换为命令消息,以便aoc控制器进行控制(即使动力机器被驱动)。参考图6中示出的操作环境系统框图、参考图7中示出的方法流程图、并参考随后的各种设计讨论,将在下面以不同程度的额外细节讨论定位子系统、障碍物检测子系统、路径规划子系统和机器控制子系统。
62.现在参考图6,示出了不支持gps环境的操作环境602,诸如其中不能可靠地从gps系统卫星接收gps信号的建筑物或其他作业空间。在环境602内形成的是局部定位系统604,该局部定位系统604包括用于帮助确定动力机器600的位置的多个定位设备(示出了设备606、608和610)。设备606至610可以是被定位在结构或操作环境内或所述结构或操作环境附近并且向动力机器600传输信号或从动力机器600接收信号以帮助确定动力机器在局部环境602内的位置的传感器、接收器、发射器和/或收发器。传感器的数量可以根据特定不支持环境的形状和大小而变化。在一些示例性实施例中,使用超宽带(uwb)技术的系统提供实时定位系统(real-time location system,rtls),尽管任何rtls技术可以根据期望用于特定的操作环境、动力机器设计等。decawave rtls使用可以被定位在动力机器600上并被配置为周期性地传输消息的标签612(发射器或收发器),以及被配置为接收来自标签612的传输并在各个锚处接收时对消息加时间戳的多个定位设备或锚(接收器或收发器)606、608和610。标签612的位置然后可以使用到达时间差技术由在多个锚中的每个锚处接收消息的时间被计算。到达时间还可以指示在标签和多个锚中的每一个锚之间计算的距离,从而允许使用多个距离指示测量值来确定标签的位置。
63.在示例性实施例中,动力机器600包括相互协作作业以提供增广操作员控制或自主操作员控制的多个控制器或控制系统。定位控制器614包括标签612或者与标签通信,并且被配置为确定动力机器在操作环境602内的位置。定位控制器614向自主或增广操作控制器(aoc)616提供位置信息,该aoc 616被配置成实施增广控制方法,从而以自主或半自主的方式控制机器。aoc 616又与动力机器上的标准控制器618对接,以控制机器行进或其他功能,诸如升降、倾斜等。在一些实施例中,定位控制器614还被配置成利用物体检测传感器652(诸如上面参考图5中示出的传感器352所讨论的)来检测物体或障碍物620、622和624的位置。如上所讨论那样,物体检测传感器可以是任何合适的传感器或传感器系统,诸如具有图像处理的视频传感器、雷达、光检测和测距(lidar)传感器等。然而,在其他实施例中,物体或障碍物620至624的位置使用其他方法来辨别,诸如使用诸如手机或其他类似设备的手持计算设备来标记并被存储在动力机器600上的数据库或图中。
64.在一些实施例中,增广操作控制器616还可以包括全球定位系统功能,该全球定位系统功能用于在卫星定位信号可用时确定动力机器的位置。这允许动力机器600在支持gps的环境和不支持gps的环境中使用,并且在动力机器从一个环境移动到另一环境时在所述环境之间进行转移。在一些情况下,动力机器可以被定位成使得局部定位环境和gps环境中的两者可同时访问。在一些实施例中,定位控制器被配置成一旦可用就利用局部环境,使得在支持gps的环境中操作和在不支持gps的环境中操作之间的转移尽可能是无缝的。在其他实施例中,各种方案可以用于在gps和局部定位环境之间切换。
65.在一些示例性实施例中,定位控制器614被配置成确定动力机器600在环境602内的位置、辨别环境内的期望位置630、以及辨别障碍物620至624的位置。定位控制器614然后可以生成路径634,并将该路径下载到aoc 616。aoc然后使用所生成的路径634以经由机器控制器618控制机器行进功能。在其他实施例中,定位控制器614确定动力机器位置,但是aoc 616自己生成路径634,并且然后控制机器控制器沿以着该路径移动机器。虽然aoc、定位控制器和标准控制器被描述为单独的控制器,但是在一些实施例中,这些控制器可以组合成单个控制器或多个控制器。虽然在一些实施例中,使控制器位于单独的物理容器中可
能是有利的(例如,在系统可以以套件的形式被添加到现有机器的情况下),但是在其他实施例中,将与aoc、定位控制器和标准控制器相关联的所有功能集成到单个控制器组件中可能是有利的。
66.现在参考图7,示出了提供动力机器的自主控制或增广控制的方法700。如框702处所示,辨别局部定位系统环境604。动力机器可以使用定位环境604在建筑物602内开始操作,或者动力机器可以在支持gps的环境中从外部行进并转移到局部环境中。控制器614被配置成识别动力机器已经进入或正在进入局部定位环境,并将自动决定使用局部定位信息而不是卫星定位信息。如上所讨论那样,在一些实施例中,当卫星定位信号和局部定位信号两者同时可用时,可以尽快地利用局部环境,使得向局部位环境的转移是无缝的或者尽可能接近无缝。在框704处,使用局部环境604来辨别动力机器的相对位置。
67.在框706处,辨别局部环境内的期望动力机器目的地(例如,位置630)。定位控制器614或aoc 616可能已经使期望的位置信息可用,或者一旦位于局部环境内就可以提供所述信息。在一些实施例中,期望目的地可以通过远离动力机器被定位成远离动力机器的外部设备通信传送到控制器中的一个。例如,诸如智能电话或平板电脑的手持计算设备可以被配置有应用,以允许远离动力机器的用户提供这种信息。在其他实施例中,该信息可以由动力机器的操作员通过动力机器的操作员输入设备输入。
68.在框708处,辨别、检测或定位局部环境内的障碍物。可以使用如上所讨论的物体传感器或传感器系统352、652、或者利用外部或远程标记设备(诸如手持计算设备)来实现此。一旦已知动力机器的位置和障碍物在局部环境中的位置,则定位控制器614或aoc 616可以用于创建从当前动力机器位置到期望位置的动力机器路径。这在框710处被示出。然后,如框712处所示,动力机器被控制,以使动力机器沿着所辨别的路径行驶到期望目的地。这种控制可以是辅助操作员执行该任务的增广控制,或者可以是完成的自动控制。
69.定位子系统设计
70.再次参考定位系统或子系统604,可以利用多种不同的合适系统设计中的任何一种。一个这样的子系统利用decawave为室内不支持gps的定位提供位置信息。扩展卡尔曼滤波器(extended kalman filter,ekf)则可以用于将decawave测距值融合到xy坐标中。
71.融合decawave测距的问题可以用公式表示如下。考虑在状态s的的情况下在2d笛卡尔平面中的标签:
[0072][0073]
考虑在一环境中具有位置(x1;y1);(x2;y2)
……
(xn;yn)的n个锚。锚的系统将产生如下飞行时间测距:
[0074][0075]
这可以被概括为以下内容,其中i=1
……n[0076]
[0077][0078][0079]
在这个示例中,锚1
……
n的测距用于确定标签的位置(x;y)。
[0080]
具有转移矩阵a、控制输入b、噪声矩阵g以及输入u
t
和噪声w
t
的离散时间动态系统的公式为:
[0081]st+1
=a
tst
+b
tut
+g
twt
[0082]
公式的示例性实施方式使用布朗运动模型,该模型假设代理处于静态位置。由于没有移动,转移矩阵为:
[0083][0084]
由于没有输入,u项可以被去除。由于目标将移动,过程噪声协方差q将相当大。现在考虑具有传感器变换矩阵h和测量噪声v
t
的传感器测量模型:
[0085]dt
=h
tst
+v
t
[0086]
注意,这种情况下的变换是非线性的。由于与上面用于求解飞行时间方程中一样在距离方程下距离与状态有关,因此方程可以在当前状态估计下被线性化,并将h重新定义为:
[0087][0088]
利用在每次迭代时计算的新变换矩阵h,该ekf可以被用作常规卡尔曼滤波器。在该示例中实施涉及高度z的3d情况。
[0089]
为了评估示例性实施例的精度,进行了实验来量化系统在由四个锚形成的矩形区域内的精度。三个decawave锚安装在合适的高度(例如,地面上方六到十英尺)处,并且第四个decawave单元被用作标签。
[0090]
为了提供对decawave标签的位置如何影响位置测量精度的理解,在总共39个不同的样本位置处采集了300个数据点。对于每个样本位置,计算平均x坐标值和y坐标值。还计算了位置测量的均方根(root mean squared,rms)距离值。rms距离定义如下:
[0091][0092]
其中n是所采集的数据点的数量,xi和yi是每个相应测量值的x坐标和y坐标,并且和是测量值的平均x坐标和v坐标。发现94.9%的rms精度值在10cm以下。高于正常rms距离的区域靠近由decawave锚形成的矩形区域的边缘。因此,发现decawave定位系统可以
很好地作业以用于增广式动力机器控制操作。
[0093]
避障子系统设计
[0094]
所公开的实施例的避障特征可以被认为是单独的子系统,或者可以被集成到定位控制器或aoc控制器中。一个目标可以是在具有未知障碍物的已知环境中对装载机进行导航。在示例性实施例中,立体相机可以用于感测环境。立体相机创建的3d点云可以使用合适的压缩算法被压缩成2d成本图。成本图是代表对于自动化动力机器在单元网格中操作来说是安全的地方的数据结构。通常,成本图中的值是二进制的,从而表示自由空间或其中机器可能会碰撞的地方。在示例性实施例中,成本图然后被馈送到路径规划器算法以执行路径规划。
[0095]
成本图层
[0096]
典型的成本图包含三个层:基于环境的已知图的静态层、标记环境中的未知障碍物的障碍物层、以及使障碍物膨胀的膨胀层,该膨胀层考虑了车辆或动力机器的大小。
[0097]
为了相对于动力机器正确放置障碍物,成本图生成器需要知道传感器(相机)和车辆本身之间的相对位置。例如,永不改变的静态环境参考系被称为地图,车辆的底座的框架称为base_link,相机框架称为zed_camera_center。在每种情况下,成本图生成器需要知道zed_camera_center相对于图系的位置,这是因为所有的点云数据是从此参考系被捕获的。为了提供该信息,提供广播节点以处理这个转换。
[0098]
路径规划子系统设计
[0099]
在动力机器能够从其当前位置移动到优选目的地之前,在给定起点和图的情况下,动力机器应该采取的到达目的地的路径。可接受的算法应该使用基本的深度优先搜索概念来给出一个最优和完整的解决方案,这意味着它将总是寻找两点之间的最短路径,如果有的话,实际上是可用路径。
[0100]
所生成的成本图被视为节点网格,并且在图上已经辨别了起始节点和目的地节点。路径规划算法随后以迭代的方式分析起始节点周围的节点,然后基于评估使相邻节点重复移动,直到到达目的地节点。评估包含两个考虑。第一个考虑是从起始节点到感兴趣节点的成本。随着背离起始节点移动得越远,行进成本越高。第二个考虑来自从感兴趣节点到目的地节点的成本。该成本(通常被称为启发式)只是估计,并且该成本可以使用欧几里得距离被估计。到达目的地节点之后,可以进行回溯并得到包含从起点到目的地的多个节点的最短路径。搜索算法的伪代码可以在图8中找到。
[0101]
使用路径生成算法,获取基本上是节点的列表的路径。然后可以指令动力机器控制器一个接一个地跟随路径上的节点。注意,目标是动力机器尝试前往的路径列表上的当前节点。用于更新目标的伪代码在图8中示出。
[0102]
在路径规划节点产生路线和当前路点后,动力机器必须行驶,并且必须校正朝向路点的机器轨迹中的任何错误。为了实现此,控制器和相对应的ros节点可以如下所述被实施。
[0103]
ros实施方式
[0104]
在示例性实施例中,控制器位于单个ros节点内,该ros节点订阅当前航向、当前位置和当前路点位置。控制器发布信号以便路径规划器重新规划。该节点还向aoc控制器推出usb串行消息。
[0105]
对于控制规则,基本的继电器式控制器利用死区被实施。继电器式控制是控制力在两种状态之间切换的控制规则。在该示例中,两种状态是以固定的速度左转和右转。如上所提及那样,误差是来自从动力机器指向当前路点的向量的航向方面的差。当误差为正时,动力机器被命令以恒定速度在一个方向上转弯。当误差为负时,动力机器被命令以相同的速度转向另一方向。在该示例中,继电器式控制通过死区被修改,从而有效地创建了第三状态。当误差的绝对值在某个值内时,动力机器被命令简单地向前移动。由于控制器没有增益参数或识别超出死区阈值的误差幅度,机器将关于期望航向具有相当大的振荡行为。
[0106]
存在期望的路点将改变的两种主要方式。第一种方式是当动力机器在当前路点的固定距离内时。一旦动力机达到该阈值,就分配来自路径规划器的下一路点。路点被重新分配的第二种方式是在动力机器由于控制器不准确而移动到距当前路点太远的情况下。在示例性实施例中,为距路点的最大距离设置固定阈值。当动力机器在这个距离之外时,路径规划器被触发以制定新的计划,并分配在动力机器的阈值距离内的路点。
[0107]
驱动动力机器
[0108]
为了实际驱动车辆,控制节点通过usb串行通信将驱动命令推送到aoc。在一些实施例中,aoc运行将进入的串行驱动命令转换成控制器局域网(controller area network,can)总线消息以启动动力机器并使动力机器在各个方向上行驶的脚本。
[0109]
尽管已经通过参照优选实施例描述了本发明,但是本领域技术人员将认识到,在不背离本讨论的范围的情况下,可以在形式和细节上进行改变。