1.本公开涉及一种控制多个电子装置的方法,更具体地说,涉及这样一种控制多个电子装置的方法,该方法在没有服务器干预的情况下确定语音命令识别装置之间的优先权和目标电子装置。
背景技术:
2.家用电器是指家庭中提供的电器,例如:冰箱、空调、烹饪电器、清洁器(真空清洁器)等。传统上,为了操作这样的家用电器,用户在靠近家用电器的状态下直接进行操作,或者使用遥控器等远程控制家用电器。
3.然而,随着近年来通信技术的发展,已经引入了这样一种技术:用户使用语音输入命令来操作家用电器,并且家用电器通过识别输入到家用电器的语音内容来操作。
4.传统的家用电器包括语音识别系统、控制器、存储器和驱动单元。当用户说出或发出与特定命令相对应的语音时,家用电器收集该语音并使用语音识别系统分析收集的语音。
5.作为分析所收集的语音的结果,可以提取与该语音对应的文本。控制器可以将提取的第一文本信息与存储在存储器中的第二文本信息进行比较,并确定这些文本是否相互匹配。
6.当第一文本信息和第二文本信息相互匹配时,控制器可以识别与第二文本信息对应的家用电器的预定功能。
7.然后,控制器可以基于所识别的功能来操作驱动单元。
8.根据这种传统的家用电器,当用户给出的语音输入到能够识别语音的多个家用电器时,可能会发生家用电器的操作混淆。
9.此外,在传统的家用电器中,家用电器的不同特征点(启动命令)用来防止混淆。然而,在这种情况下,用户应该记住每个家用电器的不同启动命令。
10.此外,在传统的家用电器中,没有语音输入单元的电子装置或家用电器不能由语音命令控制。
11.此外,在传统的家用电器中,服务器的干预对于在多个电子装置或家用电器中选择语音命令的优先权是必要的。
12.(相关专利公报)韩国专利特开公报:10-2005-0088538
技术实现要素:
13.技术问题
14.本公开是为了提供一种控制多个电子装置的方法,该方法能够通过用户使用自然语言的语音或特征点(启动命令)来操作多个电子装置。因此,用户不需要记住或区分每个电子装置的特征点。
15.本公开还提供了一种控制多个电子装置的方法,该方法能够在没有额外的服务器
干预的情况下执行语音命令,并减少服务器的负担,因为多个电子装置的控制器之一成为分析语音命令、确定目标电子装置并将语音命令传输到目标电子装置的主装置。
16.本公开进一步提供一种控制多个电子装置的方法,该方法能够操纵或操作多个电子装置当中不具有语音识别装置的电子装置。
17.本公开进一步提供一种控制多个电子装置的方法,该方法能够由用户的语音操纵或操作位于不能收集用户的语音的地点的电子装置。
18.本公开进一步提供一种控制多个电子装置的方法,该方法能够基于每个电子装置的语音信息和操作信息精确确定目标电子装置。
19.本公开不限于上述内容,本领域技术人员将根据以下描述清楚地理解未提及的待解决的问题。
20.技术方案
21.根据本公开的一种控制多个电子装置的方法涉及一种控制由网络连接的多个电子装置的方法,该方法包括以下步骤:(a)由所述多个电子装置收集语音;(b)基于所述多个电子装置中的每一者收集到的语音的信息,提取语音命令;(c)将收集所述语音的所述多个电子装置中的一者确定为主装置,并将收集所述语音的所述多个电子装置中的其他装置确定为从装置;(d)通过由所述主装置分析所述语音命令,确定所述语音命令的目标电子装置;以及(e)由所述主装置将所述语音命令传输给所述目标电子装置。
22.当所述多个电子装置同时提取同一语音命令时,可以执行步骤(c)。
23.在步骤(c)中,可以将收集所述语音的所述多个电子装置中的一者随机地确定为所述主装置。
24.在步骤(c)中,可以将收集所述语音的所述多个电子装置当中收集的所述语音最响的电子装置确定为主装置。
25.在步骤(c)中,可以将收集所述语音的所述多个电子装置当中以最高精度收集所述语音的电子装置确定为主装置。
26.在步骤(d)中,所述主装置可以将所述主装置和所述从装置当中能根据所述语音命令操作的电子装置确定为所述目标电子装置。
27.在步骤(d)中,当所述主装置和所述从装置当中有多个能根据所述语音命令操作的电子装置时,所述主装置将收集所述语音的所述多个电子装置当中以最高精度收集所述语音的电子装置确定为所述目标电子装置。
28.在步骤(d)中,当所述主装置和所述从装置当中有多个能根据所述语音命令操作的电子装置时,所述主装置可以将所述多个电子装置中的能基于用户的预先存储的命令模式根据所述语音命令操作的一者确定为所述目标电子装置。
29.在步骤(d)中,当所述主装置和所述从装置中有多个可根据所述语音命令操作的电子装置时,所述主装置可以基于预先存储的用户的命令模式将可根据所述语音命令操作的所述多个电子装置中的一者确定为所述目标电子装置。
30.在步骤(d)中,当所述主装置和所述从装置当中没有能根据所述语音命令操作的电子装置时,所述主装置可以将除所述主装置和所述从装置以外的电子装置当中能根据所述语音命令操作的电子装置确定为所述目标电子装置。
31.在步骤(d)中,当借助所述网络连接的所述多个电子装置当中没有能根据所述语
音命令操作的电子装置时,所述主装置可以使所述多个电子装置中的一者作为无线路由器操作,并将所述语音命令传输给所述无线路由器。
32.借助所述网络连接的所述多个电子装置中的每一者均可以将所述语音命令是否能操作传输给所述主装置。
33.该方法可以进一步包括:由所述主装置更新用户的语音命令模式。
34.所述主装置可以将所述用户的更新的语音命令模式传输给借助所述网络连接的所述多个电子装置。
35.其他实施方式的细节包括在详细描述和附图中。
36.有益效果
37.根据本公开的一种控制多个电子装置的方法,有以下一个或多个效果。
38.首先,根据本公开,用户可以通过使用自然语言的语音或一个特征点来操作多个电子装置,而不需要记忆或区分每个电子装置的特征点(启动命令)。因此,通过使用用户的语音对电子装置进行语音操作可以很方便。
39.其次,由于多个电子装置的控制器之一成为分析语音命令、确定目标电子装置并将语音命令传输到目标电子装置的主装置,因此可以在没有额外的服务器干预的情况下执行语音命令。因此,可以减少服务器的负担,不需要额外的服务器,可以减少服务器的成本,并且即使在服务器和电子装置断开连接时也可以执行语音命令。
40.第三,当具有语音识别装置的电子装置不能执行提取的语音命令时,具有语音识别装置的电子装置向不具有语音识别装置的电子装置传输语音命令。因此,不具有语音识别装置的电子装置可以通过具有语音识别装置的电子装置进行语音操作。而且,由于不需要向不具有语音识别装置的电子装置安装语音识别装置,因此可以减少成本。
41.第四,根据本公开,位于无法收集用户语音的位置的电子装置可以由用户的语音来操纵或操作。因此,无论用户的位置如何,都可以执行用户的语音命令,从而为用户提供了便利。
42.此外,由于可以根据每个电子装置的语音信息和操作信息精确地确定目标电子装置,因此,可以防止语音命令的混淆和电子装置的故障。
43.本公开的效果不限于上述效果,本领域技术人员将根据权利要求清楚地了解其他未提及的效果。
附图说明
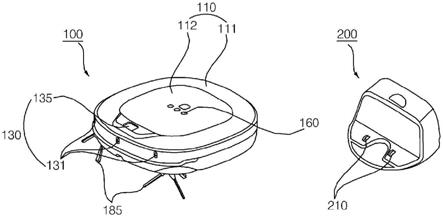
44.图1是示出根据本公开的一个实施方式的移动机器人和用于为移动机器人充电的充电站的立体图。
45.图2是从上侧观察的图1所示的移动机器人的俯视图。
46.图3是从前侧观察的图1中所示的移动机器人的前视图。
47.图4是从下侧观察的图1所示的移动机器人的仰视图。
48.图5示出了根据本公开的一个实施方式的电子装置和电子装置的操作方法。
49.图6示出了根据本公开的一个实施方式的多个电子装置。
50.图7示出了向多个电子装置发出语音的情况。
51.图8示出了多个电子装置中的目标电子装置的操作。
52.图9是示出控制多个电子装置的方法的流程图。
具体实施方式
53.将参照下面与附图一起详细描述的实施方式来阐明本公开。然而,本公开不限于下面公开的实施方式,而是可以以各种不同的形式实施。提供这些实施方式只是为了使本公开完整,并向具有本公开所属技术领域的普通技术人员充分公开本公开。本公开的范围仅由权利要求书来定义。相同的附图标记在整个说明书中指的是相同的部件、单元、构件、部分或元件。
54.空间上相对的术语“在
……
之下”、“在
……
下方”、“下方的”、“在
……
之上”和“上方的”等可用于轻松描述元件与其他元件的关联性。空间上相对的术语应按照图中所示的方向(包括在使用或操作时部件的不同方向)理解。例如,当倒置图中所示的元件时,被描述为在另一元件的之下或下方的元件可能置于另一元件之上。因此,示例性的术语“在
……
之下”可以包括向下和向上两个方向。元件也可以在不同的方向上取向,因此,可以根据取向来解释空间上的相对术语。
55.本文中使用的术语是用于描述实施方式,并不意图限制本公开。在本说明书中,单数形式包括复数形式,除非上下文另有明确规定。需要注意的是,本说明书中使用的术语“包括”是指所提及的元件、步骤和/或操作不排除存在或增添一个或多个其他元件、步骤和/或操作。
56.除非另有定义,本文中使用的所有术语(包括技术和科学术语)都可以按本公开所属技术领域的普通技术人员通常理解的意义使用。此外,除非另有明确定义,否则预定的和常用的术语不被理想地或过度地解释。
57.在图中,为了方便和清晰起见,每个部件、单元、构件、部分或元件的厚度或尺寸被扩大、省略或示意性地示出。此外,每个部件、单元、构件、部分或元件的尺寸和面积并不完全反映实际尺寸或面积。
58.下文中,将参照附图描述本公开的优选实施方式。
59.根据本公开的移动机器人100可以包括能够使用轮等自我移动的机器人,并且可以包括家庭帮手机器人、机器人清洁器等。
60.下文中,将参照图1至图4描述多个家用电器(多个电子装置)中的移动机器人。机器人清洁器100被描述为移动机器人的一个实施例,但本公开不一定限于此。
61.移动机器人100可以包括主体110。下文中,在定义主体110的每个部分时,在驱动区域中面向天花板的部分可以定义为上部(参照图2),在驱动区域中面向地板的部分可以定义为下部(参照图4),并且在上部和下部之间形成主体110的圆周的部分中面向驱动方向的部分可以定义为前部(参照图3)。此外,面向主体110的前部的相反方向的部分可以定义为后部。主体110可以包括外壳111,该外壳形成其中容纳构成移动机器人100的各种部件的空间。
62.移动机器人100包括感测单元130,该感测单元感测或检测关于移动机器人100外部的信息。
63.感测单元130可以感测或检测关于驱动区域的信息。感测单元130可以检测障碍物,例如墙壁、家具和驱动表面上的悬崖。感测单元130可以检测关于天花板的信息。感测单
元130可以检测放置在驱动表面上的物体。借助由感测单元130检测的信息,移动机器人100可以执行驱动区域的测绘。感测单元130可以由至少一个传感器构成。感测单元130可以使用传感器检测入侵检测信息。具体而言,感测单元130可以检测移动机器人周边的图像信息。
64.在这种情况下,入侵检测信息可以包括能够检测外部入侵的所有信息。例如,入侵检测信息可以包括移动机器人周边的图像信息和声音信息、前门和窗户周边的图像信息和声音信息。另外,入侵检测信息可以包括借助网络连接到移动机器人的电子装置周边的图像信息和声音信息。
65.例如,感测单元130可以包括图像感测单元135,该图像感测单元感测或获取外部(移动机器人的周边)的图像。图像感测单元135对驱动区域进行拍照。图像感测单元135可以包括数字相机。数字相机可以包括至少一个光学镜头、图像传感器和数字信号处理器(dsp)。图像传感器可以包括多个光电二极管(例如,像素),其中图像被穿过至少一个光学镜头的光聚焦。例如,图像传感器可以是互补的金属氧化物半导体(cmos)图像传感器。数字信号处理器可以基于光电二极管输出的信号生成图像。数字信号处理器不仅可以生成静态图像,还可以生成由包括静态图像的帧形成的动态图像。
66.感测单元130可以包括距离检测单元131,该距离检测单元检测与障碍物的距离。距离检测单元131可以布置在主体110的前部。距离检测单元131可以检测前侧的障碍物。可以提供多个距离检测单元131。距离检测单元131可以包括超声波或红外线。
67.距离检测单元131可以包括相机。
68.感测单元130可以包括悬崖检测单元132,该悬崖检测单元检测驱动区域中的地板上的悬崖。可以提供多个悬崖检测单元132。
69.此外,感测单元130可以包括检测驱动区域的照度(亮度水平)的照度检测传感器(未示出)。可以提供多个悬崖检测单元132。
70.感测单元130可以进一步包括用于获取地板的图像的下方图像传感器137。
71.移动机器人100可以包括移动主体110的驱动单元160。驱动单元160相对于地板移动主体110。驱动单元160可以包括移动主体110的至少一个驱动轮166。驱动单元160可以包括驱动马达。驱动轮166可以分别设置在主体110的左侧和右侧。下文中,左侧和右侧的驱动轮166被称为左轮166(l)和右轮166(r)。
72.左轮166(l)和右轮166(r)可以由一个驱动马达驱动,但如果有必要,可以分别提供用于驱动左轮166(l)的左轮驱动马达和用于驱动右轮166(r)的右轮驱动马达。主体110的驱动方向可以通过使左轮166(l)和右轮166(r)的旋转速度不同而被切换到左侧或右侧。
73.移动机器人100可以包括执行预定作业的作业单元。该作业单元执行预定操作的同时产生噪音。例如,旋转用于梳理或清扫的刷而产生噪音,以及操作用于真空抽吸的抽吸马达而产生噪音。
74.作为一个实施例,作业单元可以提供成执行诸如清洁(梳理或清扫、抽吸清洁、拖地等)、洗碗、烹饪、洗衣服和垃圾处理之类的家务劳动。作为另一个实施例,作业单元可以提供成执行诸如制造或修理电器或装置之类的操作。作为另一个实施例,作业单元可以执行诸如寻找物体或驱赶昆虫之类的作业。
75.作为另一个实施例,作业单元可以执行检测外部入侵者、危险情况等的安全功能。
作业单元可以包括用于执行安全功能的相机,在这种情况下,图像感测单元135可以执行用于执行安全功能的相机的功能。
76.下文,在本实施方式中,将描述作业单元执行清洁操作。然而,作业单元的作业类型可以是多种多样的,并且作业单元不需要限于描述的实施例。
77.移动机器人100可以借助作业单元在移动驱动区域的同时清洁地板。作业单元可以包括用于吸入异物的抽吸装置、用于执行梳理或清扫的刷184和185、其中存储由抽吸装置或刷收集的异物的灰尘容器(未示出)和/或用于执行拖地的拖把部分(未示出)等。
78.主体110的下表面处可以形成有供吸入空气的抽吸口180h。在主体110中,可以设置有:抽吸装置(未示出),其提供抽吸力以使空气能够经由抽吸口180h被抽吸;以及灰尘容器(未示出),其中收集与空气一起经由抽吸口180h被抽吸的灰尘。
79.在外壳111中,可以形成有用于插入和分离灰尘容器的开口,并且可以相对于外壳111可旋转地设置有打开和关闭该开口的灰尘容器盖112。
80.可以提供主刷184和辅助刷185。主刷184可以是卷式的,包括经由抽吸口180h暴露的刷构件。辅助刷185可以具有由在主体110的下部的前侧径向延伸的多个翼形成的刷构件。可以通过刷184和185的旋转从驱动区域中的地板清除灰尘,并且与地板分离的灰尘经由抽吸口180h抽吸并收集在灰尘容器中。
81.电池177可以为移动机器人100的整体操作供应动力,包括用于驱动马达的动力。
82.电池177可以是可充电的。当移动机器人100停靠到充电站(充电底座)200时,充电端子210和相应的端子190相互连接,从而为电池177充电。当电池177的充电量等于或小于预定值时,移动机器人100可以执行返回驱动到充电站200以对电池177充电。在返回驱动期间,移动机器人100可以检测充电站200本身的位置。
83.充电站200可以包括信号传输部分(未示出),该部分传输预定的返回信号。该返回信号可以是超声波信号或红外信号,但不限于此。
84.参照图6,根据本公开的一个实施方式的语音识别系统10可以包括能够进行语音识别的多个电子装置100、200、300和400。
85.例如,多个智能电子装置100、200、300和400可以包括清洁器100、烹饪电器200、空调300和冰箱400。
86.多个电子装置100、200、300和400可以处于能够接收语音的待机状态。当用户为每个智能电子装置设定语音识别模式时,可进入并维持待机状态。
87.在这种情况下,可以通过经由预定的输入单元的输入或通过输入预定的语音来执行语音识别模式的设定。
88.多个电子装置100、200、300和400中的一者可以不包括语音输入单元和语音识别单元。在这种情况下,具有语音输入单元和语音识别单元的另一个电子装置可以提取语音命令并将其提供给不包括语音输入单元和语音识别单元的电子装置。
89.每个电子装置均可以包括通信单元(未示出)。该通信单元可以借助有线、无线和卫星通信方法中的一种连接方法与位于特定区域中的终端和/或其他电子装置连接,以与终端和/或其他电子装置传输和接收数据。
90.通信单元可以接收来自诸如其他电子装置或终端之类的外部装置的各种命令信号(终端信号)。通信单元可以传输要输出到诸如终端之类的外部装置的信息。
91.例如,通信单元可以借助诸如ieee 802.11wlan、ieee 802.15wpan、uwb、wi-fi、zigbee、z-wave、蓝牙(blue-tooth)之类的无线通信技术进行无线通信。通信单元可以根据其他装置的通信方法或要与之通信的服务器而变更。
92.电子装置100、200、300和400的信息可以借助通信单元在网络600上接收,并且可以基于接收的信息控制电子装置100、200、300、400。
93.网络600可以指借助电线和/或无线直接或间接连接的通信网络。即,“通信单元借助网络600与终端进行通信”这一短语可以包括通信单元和终端借助无线路由器400等间接通信的情况以及通信单元和终端直接通信的情况。
94.网络600可以基于诸如wi-fi、以太网、zigbee、z-wave和蓝牙之类的技术形成。
95.多个电子装置100、200、300和400可以一起位于预定空间内。在这种情况下,即使用户朝着多个电子装置100、200、300和400中的特定电子装置发出预定语音命令,其他电子装置也可能响应该语音命令。
96.因此,在本实施方式中,当用户发出预定语音时,可以适当地估计或判别执行语音命令的目标电子装置。此外,根据本实施方式,当用户的语音命令被确定为不接收语音的电子装置的命令时,不接收语音的电子装置可以被控制。
97.详细地,参照图6,电子装置100、200、300和400中的每一者均可以包括语音输入单元510、语音识别单元(语言识别单元)520和命令识别单元530。
98.语音输入单元510可以收集用户发出的语音。作为一个实施例,语音输入单元510可以包括麦克风。
99.语音输入单元510可以提取所收集的语音信息。在这种情况下,语音信息可以包括语音的响度和精度。当输入语音时有较少的其他噪音的情况下,语音的精度较高,而当输入语音时有较多的其他噪音的情况下,语音的精度较低。
100.语音识别单元520可以从收集的语音中提取文本。命令识别单元530可以利用提取的文本确定是否包括其中使用与每个电子装置的操作有关的预定的区分词的文本。命令识别单元530可以包括存储器,该存储器中存储关于区分词的信息。
101.当收集的语音包括使用了区分词的语音(关于语音的信息)时,命令识别单元530从使用了区分词的语音中提取语音命令。
102.虽然说明书中将语音识别单元520和命令识别单元530分别描述为具有不同的功能,但语音识别单元520和命令识别单元530可以设置在一个控制器中。
103.图7示出了向多个电子装置100、200、300和400发出语音的情况,并且图8示出了多个电子装置100、200、300和400中的目标电子装置的操作。
104.参照图7和图8,例如,当用户说出“请清洁”或发出“请清洁”的语音,而家中有能够进行语音识别的空调300和冰箱400时,空调300和冰箱400分析语音并提取语音命令。作为一个实施例,识别到使用了“请清洁”的区分词,并可以提取“开始清洁”的语音命令。
105.接收语音的空调300和冰箱400中的一者被指定为主装置。例如,当冰箱400被指定为主装置时,冰箱400可以使用各种算法和各种因素确定目标电子装置。
106.冰箱400可以按照接收语音命令的电子装置和不接收语音命令的电子装置的顺序,确定能够执行“开始清洁”的语音命令的电子装置。
107.冰箱400可以确定接收语音命令的空调300和冰箱400不能执行“开始清洁”的语音
命令,并且可以确定清洁器100作为能够执行“开始清洁”的语音命令的目标电子装置。在这种情况下,清洁器100处于不输入用户的语音的状态。
108.冰箱400可以将语音命令传输给清洁器100,并且接收到语音命令的清洁器100可以开始清洁。
109.根据本实施方式,用户可以通过使用自然语言的语音或一个特征点来操作多个电子装置,而无需记忆或区分每个电子装置的特征点(启动命令)。因此,通过使用用户的语音,可以方便地对电子装置进行操作。
110.此外,由于多个电子装置的控制器之一成为分析语音命令、确定目标电子装置并将语音命令传输到目标电子装置的主装置,因此可以在没有额外服务器干预的情况下执行语音命令。因此,可以减少服务器的负担,不需要额外的服务器,可以减少服务器的成本,并且即使在服务器和电子装置断开连接时也可以执行语音命令。
111.此外,第三,当具有语音识别装置的电子装置不能执行提取的语音命令时,具有语音识别装置的电子装置将语音命令传输给不具有语音识别装置的电子装置。因此,不具有语音识别装置的电子装置可以经由具有语音识别装置的电子装置由语音操作。另外,由于不需要在不具有语音识别装置的电子装置上安装语音识别装置,因此可以减少成本。
112.下文中,将参照图9描述根据本公开的机器人清洁器的控制方法。相同或类似的步骤在流程图中用相同的附图标记表示,并且将省略重叠的描述。
113.控制方法可由每个电子装置的控制器(未示出)执行。控制方法可以由实施控制方法的每一步骤的计算机程序来执行,或者可以是其上记录用于实施控制方法的程序的记录介质。在本说明书中,“记录介质”是指可由计算机读取的记录介质。根据一个实施方式的控制方法可以由包括硬件和软件两者的电子装置的控制系统执行。
114.控制方法的流程图中的每个步骤及其组合可以由计算机程序指令来执行。这些指令可以安装在通用计算机或专用计算机上,等等,并且这些指令可以创建执行流程图的一个或多个步骤中所述功能的手段。
115.另外,在一些实施方式中,步骤中提到的功能可以不按顺序出现。例如,相继示出的两个步骤可以基本上同时执行,或者可以根据相应的功能以相反的顺序执行。
116.根据本公开的一个实施方式的控制方法可以包括:步骤s110、s210和s310,其中由多个电子装置100、200、300和400收集语音;步骤s120和s220,其中基于由多个电子装置中的每一者收集的语音的信息提取语音命令;步骤s140和s240,其中收集语音的多个电子装置100、200、300和400中的一者被确定为主装置,其他装置被确定为从装置;步骤s150,其中主装置通过分析语音命令确定语音命令的目标电子装置(目标装置);以及步骤s160,其中主装置将语音命令传输到目标电子装置。
117.在收集语音的步骤s110、s210和s310中的每一者中,多个电子装置100、200、300和400中的每一者均可以收集用户的语音。具体而言,家中能够进行语音识别的清洁器100、空调300和冰箱400中的每一者均可以收集用户的语音。
118.在提取语音命令的步骤s120和s220中的每一者中,每个电子装置均可以基于关于所收集的语音的信息来提取语音命令。提取语音命令的方法如参考图6所述。具体而言,当用户在家中有均能够进行语音识别的空调300和冰箱400的状态下说出“请清洁”或发出“请清洁”的语音时,空调300和冰箱400中的每一者均可以通过分析语音来提取语音命令。作为
一个实施例,识别到使用了“开始清洁”的区分词,并且可以提取“开始清洁”的语音命令。
119.在确定主装置和从装置的步骤s140和s240中,在收集了语音的多个电子装置100、200、300和400中,一者被确定为主装置,其他被确定为从装置。
120.在收集了语音的多个电子装置100、200、300和400中,当多个电子装置100、200、300和400在同一时间提取相同的语音命令时,执行确定一者为主装置并且其他为从装置的步骤。在这种情况下,同一时间可以指包括一定范围误差的时间范围。
121.例如,当用户在空调300和冰箱400在一起的状态下说出“请清洁”或发出“请清洁”的语音时,如果空调400和冰箱500分析该语音并提取“开始清洁”的语音命令,则可以认为多个电子装置100、200、300和400在同一时间提取相同的语音命令。
122.多个电子装置100、200、300和400可以向网络600提供与确定主装置和从装置有关的基本数据,或者向网络600提供它们自己的操作信息(s130、s230、s330)。每个电子装置的操作信息均可以预先存储在存储器中。
123.详细地,收集了语音并提取了语音命令的空调300和冰箱400可以向网络600提供:操作信息,其包括根据提取的语音命令的操作是否可能;以及语音信息,其包括收集的语音的响度和精度。清洁器100可以向网络600提供包括可由清洁器100操作的语音命令的操作信息。
124.作为在收集了语音的多个电子装置100、200、300和400中确定主装置的方法,可以使用各种方法。例如,已经收集了语音的多个电子装置100、200、300和400中的一者可以被随机地确定为主装置。作为另一个实施例,在已经收集了语音的多个电子装置100、200、300和400中收集的语音最响的电子装置可以被确定为主装置。作为又一个实施例,在已经收集了语音的多个电子装置100、200、300和400中以最高的精度收集了语音的电子装置可以被确定为主装置。作为又一个实施例,在已经收集了语音的多个电子装置100、200、300和400中,具有最低编号的ip地址的电子装置可以被确定为主装置。
125.更特别的是,在已经收集了语音的空调400和冰箱500中,收集的语音最响亮和最准确的冰箱400可以成为主装置。
126.在确定目标电子装置的步骤s150中,主装置可以通过分析每个语音命令来确定语音命令的目标电子装置。主装置确定目标电子装置的方法可以是多种多样的。
127.主装置可以考虑到根据语音命令的操作是否可能、语音的精度和语音的响度来确定目标电子装置。在这种情况下,目标电子装置可以指执行用户的语音命令的电子装置。
128.例如,主装置可以将主装置和从装置当中可根据语音命令操作的电子装置确定为目标电子装置。考虑到用户发出语音命令的位置,收集了语音的电子装置可以有执行语音命令的优先权。
129.作为另一个实施例,当在主装置和从装置当中有多个可根据语音命令操作的电子装置时,主装置可以将多个电子装置100、200、300和400中以最高精度收集语音的电子装置确定为目标电子装置。
130.作为又一个实施例,当在主装置和从装置当中有多个可根据语音命令操作的电子装置时,主装置可以将多个电子装置100、200、300和400中收集的语音最响的电子装置确定为目标电子装置。
131.更特别的是,当空调300和冰箱400提取“请降低温度”的语音命令时,空调300和冰
箱400两者都可以根据该语音命令进行操作,因此,主装置可以确定收集的语音最响的冰箱400为目标电子装置。
132.作为另一个实施例,当在主装置和从装置当中有多个可根据语音命令操作的电子装置时,主装置可以将多个电子装置100、200、300和400当中可基于用户的预先存储的命令模式操作的电子装置确定为目标电子装置。
133.在这种情况下,用户的命令模式可以是指用户在过去一段时间内的当前日期和当前时间使用的电子装置的信息。
134.作为另一个实施例,如果在主装置和从装置当中没有可根据语音命令操作的电子装置,则主装置可以将在除主装置和从装置之外的电子装置当中可根据语音命令操作的电子装置确定为目标电子装置。
135.具体而言,当空调300和冰箱400提取“开始清洁”的语音命令时,作为从装置的空调300和作为主装置的冰箱400都不能执行该语音命令,因此,冰箱400可以讲在除主装置和从装置之外的电子装置当中可根据该语音命令操作的清洁器确定为目标电子装置。
136.作为另一个实施例,如果在经由网络600连接的多个电子装置100、200、300和400中没有可根据语音命令操作的电子装置,则主装置使多个电子装置100、200、300和400中的一者作为无线路由器操作,并且主装置将语音命令传输到无线路由器。当目标电子装置位于遮蔽区域或阴影区域时,主装置使连接到网络600的电子装置作为无线路由器操作,从而操作处于遮蔽区域或阴影区域的目标电子装置。
137.在传输语音命令的步骤s160中,主装置可以将语音命令传输给目标电子装置。具体而言,冰箱可以将“开始清洁”的语音命令传输给清洁器。
138.从主装置接收语音命令的电子装置根据语音命令进行操作。
139.主装置可以确定目标电子装置并更新用户的语音命令模式(s170)。主装置可以将用户的更新的语音命令模式传输到借助网络600连接的多个电子装置100、200、300和400(s180)。
140.接收到用户的更新的语音命令模式的每个电子装置均可以更新其语音命令模式(s280、s380)。即,每个电子装置均可以将用户的语音命令模式的更新数据存储在其存储器中。
141.尽管上面已经说明和描述了本公开的优选实施方式,但本公开并不限于上面描述的具体实施方式,而且本公开不脱离权利要求书中所要求的本公开的技术特征。另外,本领域的技术人员可以进行各种变型,不应脱离本公开的技术精神或前景独立理解这些变型。