1.本技术涉及录音笔的领域,尤其是涉及一种高清晰度的录音笔、录音方法、系统、装置和存储介质。
背景技术:
2.日常生活中,经常会使用到录音笔,录音笔一般具备麦克风、与麦克风连接的控制电路和与控制电路相连的存储器,麦克风收录声音并输入到控制电路中进行处理,最终存储进存储器中。录音笔的作用体现在会议、学习或记录谈话等过程中。目前,校园采访、公司内部采访、会议记录对录音笔的需求较高,非专业的使用者,有时候会忘记将录音笔对准发言者,导致录音效果不佳,或者里面掺杂有大量的杂音,在后期进行音频处理时会遇到较大的困难,但又难以去重新邀请发言者进行补录。
技术实现要素:
3.为了使得录音笔在非对准发言者的情况下能够获得高质量的录音,本技术提供一种高清晰度的录音笔、录音方法、系统、装置和存储介质。
4.第一方面,本技术提供的一种高清晰度的录音笔,采用如下的技术方案:一种高清晰度的录音笔,包括用于握持的笔体和设置于笔体顶端的录音头,所述录音头包括固定部和转动部,所述笔体的顶部形成有第一参考面,所述固定部固定于第一参考面,所述转动部与固定部配合形成半球体且球心位于第一参考面上,所述转动部能够在固定部远离笔体的一端转动且转动轴为所述第一参考面经过所述球心的法线,所述转动部的顶端设置有一个顶部拾音麦克风,所述转动部的侧面在围绕转动轴的环向上设置有一个或多个斜向拾音麦克风,所述固定部的侧面在围绕转动轴的环向上设置有多个固定拾音麦克风;所述斜向拾音麦克风到所述顶部拾音麦克风相对于球心的圆心角为第一圆心角,所述斜向拾音麦克风相对于转动轴所处的圆环到所述固定拾音麦克风相对于转动轴所处的圆环相对于球心的圆心角为第二圆心角,所述第一圆心角和第二圆心角的差值的绝对值大于第一阈值。
5.通过采用上述技术方案,转动部上的顶部拾音麦克风与每个斜向拾音麦克风均形成有拾音弧,固定拾音麦克风对发言者进行初步定位,并驱动转动部转动,以使得一条拾音弧对准发言者,拾音弧转动至经过最靠近发言者的固定拾音麦克风的位置,使得该固定拾音麦克风落在该拾音弧上,以与该拾音弧上的麦克风共同拾音。在相关技术中,会议室用的麦克风阵列通常环向设置且与发言者位于接近的同一水平,以方便录音,因此该麦克风阵列的拾音问题相当于二维问题。但是对于录音笔而言,由于使用者的习惯各不相同,录音笔的高度不确定且朝向不确定,因此录音笔的拾音问题相当于三维问题。在本方案中,录音笔能够通过转动部调整某一拾音弧的朝向,使其在二维上对准目标,再确定拾音弧上的最靠近目标的两个麦克风,使其作为主拾音以获取目标的拾音。同理,其它方向的拾音弧也可以对准同时发言的其它发言者以获取目标的拾音。最后,其它的麦克风收集各个方向的环境
音以用于对主拾音获得的拾音波束进行降噪。
6.此外,第一圆心角和第二圆心角的差值的绝对值大于第一阈值,使得同一拾音弧上的固定拾音麦克风、顶部拾音麦克风和固定拾音麦克风之间不等距。通过声源到每个麦克风的距离不同的特性,能够利用声源传播的时间域和三角函数计算公式来确定发声方向并定位声源。而该种不等距设置有效地放大麦克风接收到信息的不均衡性,以使得拾音弧上的斜向拾音麦克风和相邻的距离声源较近的麦克风以接收的声源方向上的声音信号为主拾音并进行定向拾音,其它麦克风在进行录音时对不同于主拾音频域的环境音进行抑制,从而提升拾音质量并保证识别效果。
7.此外,假设一种利用辅助麦克风确定声源方向,再将主拾音麦克风进行横向和纵向旋转以对准声源的方案,实际上这相当于一个双轴的机械结构,由于录音笔的体积小,双轴会反复的进行运动,实际上会产生较大的内部噪声对拾音造成影响,实现成本高、耗电快且不易维护。而在本方案通过多麦克风配合,仅使用单轴即可解决拾音不对准的问题,同时规避双轴方案所产生的缺点。
8.可选的,所述笔体内或固定部内设置有用于驱动转动部转动的伺服电机或步进电机,所述固定部内部设置有用于获取伺服电机或步进电机发出的噪声的内部拾音麦克风。
9.通过采用上述技术方案,伺服电机和步进电机能够精准地控制转动部的转动角度,从而使得拾音弧与固定拾音麦克风精准对位。同时内部拾音麦克风对电机工作的噪声进行录制,以便于后期从主拾音中滤去相应的噪声。
10.可选的,所述斜向拾音麦克风与固定拾音麦克风均环绕所述转动轴均匀排布,所述固定拾音麦克风与斜向拾音麦克风的数量差值大于等于第二阈值。
11.可选的,所述斜向拾音麦克风的个数为一个或两个,所述固定拾音麦克风的个数为六个。
12.通过采用上述技术方案,由于环境音在经过长距离的传播和折射后,通常具有各向同性,方位关系不敏感,麦克风又具有一定的体积,因此在本方案中选择将固定拾音麦克风均匀设置。同样的,由于斜向拾音麦克风需要进行高清录音,其体积通常相对较大,而斜向拾音麦克风所在位置到转动轴的距离小,难以设置多个。比如,手机麦克风的常用规格为外径4.0mm,高度1.5mm,而高清咪头的体积更大,因此,斜向拾音麦克风需要尽量少地设置以实现最大的效用。当斜向拾音麦克风有两个时,两条拾音弧将连成一条拾音半圆弧,能够与端点的两个固定拾音麦克风配合以更精确地拾取声音。
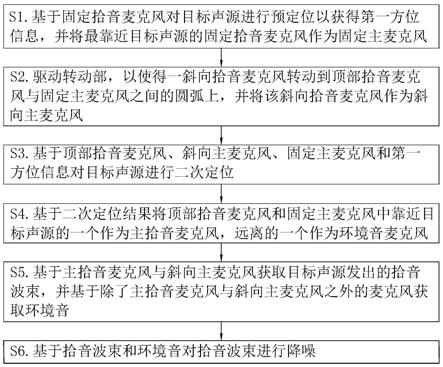
13.第二方面,本技术提供的一种高清晰度的录音笔录音方法,采用如下的技术方案:一种高清晰度的录音笔录音方法,应用于上述的录音笔,包括以下步骤:基于固定拾音麦克风对目标声源进行预定位以获得第一方位信息,并将最靠近目标声源的固定拾音麦克风作为固定主麦克风;驱动转动部,以使得一斜向拾音麦克风转动到顶部拾音麦克风与固定主麦克风之间的圆弧上,并将该斜向拾音麦克风作为斜向主麦克风;基于顶部拾音麦克风、斜向主麦克风、固定主麦克风和第一方位信息对目标声源进行二次定位;基于二次定位结果将顶部拾音麦克风和固定主麦克风中靠近目标声源的一个作为主拾音麦克风,远离的一个作为环境音麦克风;
基于主拾音麦克风与斜向主麦克风获取目标声源发出的拾音波束,并基于除了主拾音麦克风与斜向主麦克风之外的麦克风获取环境音;基于拾音波束和环境音对拾音波束进行降噪。
14.通过采用上述技术方案,所有的固定拾音麦克风获取目标声源发出的声音以对目标声源进行预定位,该预定位用于获取目标声源在第一参考面上的方位信息,即第一方位信息。基于该第一方位信息可以获得固定拾音麦克风中最靠近目标声源的一个,并作为固定主麦克风。驱动转动部以使得一拾音弧与固定主麦克风对位,使得固定主麦克风在该拾音弧上。利用顶部拾音麦克风、斜向主麦克风、固定主麦克风在垂直于第一参考面的方向上二次定位,从而获取目标声源较为精准的点位,精确选取到最靠近的两个麦克风进行声源拾音,并利用剩余的其它麦克风进行环境拾音。
15.由于第一圆心角和第二圆心角的差值的绝对值大于第一阈值,使得同一拾音弧上的主拾音麦克风、斜向主麦克风和环境音麦克风之间不等距。通过声源到每个麦克风的距离的不同的特性,能够利用声源传播的时间域和三角函数计算公式来确定发声方向并定位声源。而该种不等距设置有效地放大麦克风接收到信息的不均衡性,以使得拾音弧上的斜向拾音麦克风和相邻的距离声源较近的麦克风以接收的声源方向上的声音信号为主拾音并进行定向拾音,其它麦克风在进行录音时对不同于主拾音频域的环境音进行抑制,从而提升拾音质量并保证识别效果。
16.可选的,所述的基于固定拾音麦克风对目标声源进行预定位,并将最靠近目标声源的固定拾音麦克风作为固定主麦克风的步骤,包括以下步骤:获取固定拾音麦克风和顶部拾音麦克风所录制的声音并提取出第一声音信息,其中,第一声音信息包括接收时间差值信息、频率信息、振幅信息,固定拾音麦克风为偶数个;基于每一对相对的固定拾音麦克风和顶部拾音麦克风所得到第一声音信息获取目标声源所处的方位信息并作为第一方位信息;和/或,所述基于顶部拾音麦克风、斜向主麦克风、固定主麦克风和第一方位信息对目标声源进行二次定位的步骤,包括以下步骤:获取主拾音麦克风、斜向主麦克风和环境音麦克风所录制的声音并提取出第二声音信息,其中,第二声音信息包括接收时间差值信息、频率信息、振幅信息;基于第二声音信息获取目标声源所处的方位信息并作为第二方位信息;基于设有第一权重的第一方位信息和设有第二权重的第二方位信息确定目标声源的方位,其中,第二权重大于第一权重。
17.通过采用上述技术方案,每一对相对的固定拾音麦克风具有最大的距离差,因此相互配合能够获得更为精准的第一方位信息,通过多个第一方位信息进行加权计算以初步获得目标声源的方位。在垂直于第一参考面的方向上,由于拾音弧上的麦克风采用非等间距设置,能够更好地区分开环境音和目标发音,因此使得定位的加权计算时第二范围信息的权重更高。
18.第一声音信息包含多个不同频率以及不同幅度的声音,从该多个声音中确认频率满足频率范围,且幅度满足幅度范围的声音为目标声源的声音,即发言者的声音,其余的声音为参考音。进一步的,该频率范围和幅度范围可以是在采访过程中或多人谈话过程中,用户处于录音笔采集范围内并正常说话时,麦克风所采集到人声的频率范围和幅度范围。
19.可选的,所述基于拾音波束和环境音对拾音波束进行降噪的步骤,包括以下步骤:基于拾音波束抑制除了主拾音麦克风与斜向主麦克风之外的麦克风进行声音录制;基于所述环境音对拾音波束进行降噪,以获得目标声源发出的声音。
20.通过采用上述技术方案,麦克风在接收所有声音信号时对与发言者声音频率或波长不同的噪声进行抑制,提升拾音质量并保证识别效果。
21.第三方面,本技术提供的一种高清晰度的录音笔录音系统,采用如下的技术方案:一种高清晰度的录音笔录音系统,包括:预定位模块,用于基于固定拾音麦克风对目标声源进行预定位以获得第一方位信息,并将最靠近目标声源的固定拾音麦克风作为固定主麦克风;对焦模块,驱动转动部,以使得一斜向拾音麦克风转动到顶部拾音麦克风与固定主麦克风之间的圆弧上,并将该斜向拾音麦克风作为斜向主麦克风;校准模块,基于顶部拾音麦克风、斜向主麦克风、固定主麦克风和第一方位信息对目标声源进行二次定位;择向模块,基于二次定位结果将顶部拾音麦克风和固定主麦克风中靠近目标声源的一个作为主拾音麦克风,远离的一个作为环境音麦克风;录音模块,基于主拾音麦克风与斜向主麦克风获取目标声源发出的拾音波束,并基于除了主拾音麦克风与斜向主麦克风之外的麦克风获取环境音;降噪模块,基于拾音波束和环境音对拾音波束进行降噪。
22.通过采用上述技术方案,预定位模块利用所有的固定拾音麦克风获取目标声源发出的声音以对目标声源进行预定位,该预定位用于获取目标声源在第一参考面上的方位信息,即第一方位信息。基于该第一方位信息可以获得固定拾音麦克风中最靠近目标声源的一个,并作为固定主麦克风。对焦模块驱动转动部以使得一拾音弧与固定主麦克风对位,使得固定主麦克风在该拾音弧上。校准模块利用顶部拾音麦克风、斜向主麦克风、固定主麦克风在垂直于第一参考面的方向上二次定位,从而获取目标声源较为精准的点位,录音模块精确选取到最靠近的两个麦克风进行声源拾音,并利用剩余的其它麦克风进行环境拾音,最后降噪模块进行降噪,进一步提高录音品质。
23.第四方面,本技术提供的一种主机,采用如下的技术方案:一种主机,包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行如上述方法的计算机程序。
24.第五方面,本技术提供的一种可读存储介质,采用如下的技术方案:一种可读存储介质,存储有能够被处理器加载并执行如上述方法的计算机程序。
附图说明
25.图1用于示出本技术的某一实施例中一种高清晰度的录音笔的整体示意图。
26.图2用于示出本技术的某一实施例中一种高清晰度的录音笔沿转动轴剖面的结构示意图。
27.图3用于示出本技术的某一实施例中一种高清晰度的录音笔录音方法的流程框图。
28.图4用于示出本技术的某一实施例中s3子步骤的流程框图。
29.图5用于示出本技术的某一实施例中s6子步骤的流程框图。
30.附图标记说明:1、笔体;2、录音头;21、固定部;22、转动部;31、第一参考面;32、球心;33、转动轴;41、顶部拾音麦克风;42、斜向拾音麦克风;43、固定拾音麦克风;44、内部拾音麦克风;51、第一圆心角;52、第二圆心角;6、电机;7、拾音弧。
具体实施方式
31.以下结合附图,对本技术作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
32.在以下描述中,为了解释的目的,阐述了很多具体细节,以便提供对发明构思的彻底理解。作为本说明书的一部分,本公开的附图中的一些附图以框图形式表示结构和设备,以避免使所公开的原理复杂难懂。为了清晰起见,实际具体实施的并非所有特征都有必要进行描述。此外,本公开中所使用的语言已主要被选择用于可读性和指导性目的,并且可能没有被选择为划定或限定本发明的主题,从而诉诸于所必需的权利要求以确定此类发明主题。在本公开中对“一个具体实施”或“具体实施”的提及意指结合该具体实施所述的特定特征、结构或特性被包括在至少一个具体实施中,并且对“一个具体实施”或“具体实施”的多个提及不应被理解为必然地全部是指同一具体实施。
33.本技术实施例公开一种高清晰度的录音笔。参照图1和图2,该录音笔包括笔体1和录音头2。笔体1用于供使用者进行握持,且内部通常设置有电源、控制系统和存储器,电源用于对录音头2和控制系统进行供电,控制系统基于高清晰度的录音笔录音方法对录音头2上的麦克风进行差异性控制,以获得更清晰的录音,存储器用于将控制系统处理好的录音进行存储。录音头2设置于笔体1的顶端,用于对目标声源的声音进行录制,其中,录音头2包括固定部21和转动部22,固定部21和转动部22均设置有麦克风,在使用时转动部22发生转动以与目标声源进行对位,并与固定部21上的麦克风配合定位定向获取目标声源的发声和进行录音降噪,从而提高录音质量。
34.笔体1的形状可以为圆柱状,方块状或其它形状,但凡能够方便握持且足够容纳电源、控制系统和存储器即可,作为示例的,本技术提供的一个具体实施中,笔体1的形状为圆柱形。这里需要注意的是,转动部22的数量并不局限于一个,为了适应于圆柱形笔体1结构,本技术提供的一个具体实施中,转动部22的数量为一个且设置于笔体1的顶部。
35.具体的,笔体1的顶部端面形成有第一参考面31,固定部21固定于第一参考面31上并与笔体1一体连接。转动部22与固定部21配合形成半球体且球心32位于第一参考面31上,在不同的具体实施中,该半球体的直径可以大于、等于或小于笔体1的直径,作为示例的,本技术提供的一个具体实施中,该半球体的直径等于笔体1的直径。此外,转动部22与固定部21的交界面可以平行于第一参考面31,也可以与第一参考面31形成夹角,其具体设置根据内部的驱动机构提供的转动轴33设置方向而定,作为示例的,本技术提供的一个具体实施中,转动部22与固定部21的交界面平行于第一参考面31。
36.转动部22能够在固定部21远离笔体1的一端转动,且转动轴33为所述第一参考面31经过所述球心32的法线,在不同的具体实施中,笔体1内或固定部21内设置有伺服电机或步进电机或其它的高精度控制转动角度的电机6,电机6的转动轴33与转动部22相固定且电
机6的转动轴33的轴线与第一参考面31经过所述球心32的法线共线。举个例子,伺服电机的定位精度取决于编码器的分辨率,以2500线增量式编码器为例,驱动器对电机编码器信号输入4倍频,则控制伺服电机的定位精度为
±
1/(2500*4),以角度计算为
±
360/(2500*4)=
±
0.036度,且误差没有累积,通过该类高精度电机的驱动,转动部22上的麦克风能够高精度地与固定部21上的麦克风相对位。
37.具体的,转动部22的顶端设置有一个顶部拾音麦克风41,也就是说,顶部拾音麦克风41位于所述半球体远离笔体1的顶点处。在不同的具体实施中,转动部22的侧面可以设置有一个或多个斜向拾音麦克风42,数量能够有所调整,且多个斜向拾音麦克风42可以在环绕转动轴33的同一圆周上设置,也可以在不同圆周上设置,也就是说,斜向拾音麦克风42与顶部拾音麦克风41的距离可以相同,也可以不同。此外,若数量为多个,斜向拾音麦克风42在围绕转动轴33的环向上的间距可以相同也可以不同,位置的区别决定了控制系统算法的参数的不同,但是这些参数都是可以基于本技术所给出的录音方法而进行适应性调整的。作为示例的,在本技术提供的一个具体实施中,斜向拾音麦克风42的数量为两个且相对于所述转动轴33对称分布。
38.固定部21的侧面上设置有两个或两个以上的固定拾音麦克风43,数量能够有所调整,但是为了保证转动部22有足够的空间容纳斜向拾音麦克风42,斜向拾音麦克风42与固定拾音麦克风43的数量差值的绝对值大于等于第二阈值,这是由于斜向拾音麦克风42需要进行高清录音,其体积通常相对较大,而斜向拾音麦克风42所在位置到转动轴33的距离小,难以设置多个,而固定拾音麦克风43靠近于第一参考面31,相对斜向拾音麦克风42而言可以设置有多个。作为示例的,本技术给出的某一具体实施中,第二阈值为二。
39.多个固定拾音麦克风43可以在环绕转动轴33的同一圆周上设置,也可以在不同圆周上设置,也就是说,固定拾音麦克风43与顶部拾音麦克风41的距离可以相同,也可以不同。此外,若数量为多个,固定拾音麦克风43在围绕转动轴33的环向上的间距可以相同也可以不同,位置的区别决定了控制系统算法的参数的不同,但是这些参数都是可以基于本技术所给出的录音方法而进行适应性调整的。但是鉴于环境音在经过长距离的传播和折射后,通常具有各向同性,方位关系不敏感,麦克风又具有一定的体积,因此在本方案给出的具体实施中,选择将固定拾音麦克风43围绕所述转动轴33均匀设置且位于第一参考面31上,能够起到简化算法的复杂程度的效果。更进一步的具体实施中,固定拾音麦克风43的数量为六个且围绕所述转动轴33均匀设置。
40.作为示例的,斜向拾音麦克风42的个数为一个或两个,当采用一个时,转动部22上的顶部拾音麦克风41、斜向拾音麦克风42和一个固定拾音麦克风43能够形成一条四分之一圆的拾音弧7;当采用两个时,转动部22上的顶部拾音麦克风41、两个相对的斜向拾音麦克风42和两个相对的固定拾音麦克风43能够形成一条半圆形的拾音弧7。
41.为了提高拾音效果,基于上述示例给出的具体实施,以斜向拾音麦克风42到顶部拾音麦克风41相对于球心32的圆心角为第一圆心角51,斜向拾音麦克风42相对于转动轴33所处的圆环,到固定拾音麦克风43相对于转动轴33所处的圆环,相对于球心32的圆心角为第二圆心角52,第一圆心角51和第二圆心角52的差值的绝对值大于等于第一阈值。举个例子,比如,固定拾音麦克风43所在的圆环到斜向拾音麦克风42所在的圆环相对于球心32的夹角为55度,顶部拾音麦克风41到斜向拾音麦克风42相对于球心32的夹角为35度,第一阈
值为10度。又比如,固定拾音麦克风43所在的圆环到斜向拾音麦克风42所在的圆环相对于球心32的夹角为40度,顶部拾音麦克风41到斜向拾音麦克风42相对于球心32的夹角为50度,第一阈值为8度。
42.转动部22上的顶部拾音麦克风41与每个斜向拾音麦克风42均形成有拾音弧7,固定拾音麦克风43对发言者进行初步定位,并驱动转动部22转动,以使得一条拾音弧7对准发言者,拾音弧7转动至经过最靠近发言者的固定拾音麦克风43的位置,使得该固定拾音麦克风43落在该拾音弧7上,以与该拾音弧7上的麦克风共同拾音。第一圆心角51和第二圆心角52的差值的绝对值大于第一阈值,使得同一拾音弧7上的固定拾音麦克风43、顶部拾音麦克风41和固定拾音麦克风43之间不等距。通过声源到每个麦克风的距离的不同的特性,能够利用声源传播的时间域和三角函数计算公式来确定发声方向并定位声源。而该种不等距设置有效地放大麦克风接收到信息的不均衡性,以使得拾音弧7上的斜向拾音麦克风42和相邻的距离声源较近的麦克风以接收的声源方向上的声音信号为主拾音并进行定向拾音,其它麦克风在进行录音时对不同于主拾音频域的环境音进行抑制,从而提升拾音质量并保证识别效果。
43.进一步的,由于电机6工作时会产生噪声,固定部21内部或笔体1内部设置有用于获取电机6工作发出的噪声的内部拾音麦克风44。内部拾音麦克风44对电机6工作的噪声进行录制,以便于后期从主拾音中滤去相应的噪声。
44.参照图3,本技术实施例还公开一种高清晰度的录音笔录音方法,应用于上述的录音笔,包括以下步骤,但以下步骤的顺序的标号顺序并不对该方法产生限定。
45.s1.基于固定拾音麦克风43对目标声源进行预定位以获得第一方位信息,并将最靠近目标声源的固定拾音麦克风43作为固定主麦克风。
46.所有的固定拾音麦克风43获取目标声源发出的声音以对目标声源进行预定位,该预定位用于获取目标声源在第一参考面31上的方位信息,即第一方位信息。基于该第一方位信息可以获得固定拾音麦克风43中最靠近目标声源的一个,并作为固定主麦克风。固定主麦克风可以通过不同固定拾音麦克风43接收到目标声源声音的音量大小确定,也可以通过不同固定拾音麦克风43接收到目标声源声音的先后顺序确定,也可以采用其它的方式确定,但凡能够确定出最接近目标声源的固定拾音麦克风43的方法皆可。
47.第一声音信息包含多个不同频率以及不同幅度的声音,从该多个声音中确认频率满足频率范围,且幅度满足幅度范围的声音为目标声源的声音,即发言者的声音,其余的声音为参考音。进一步的,该频率范围和幅度范围可以是在采访过程中或多人谈话过程中,用户处于录音笔采集范围内并正常说话时,麦克风所采集到人声的频率范围和幅度范围。
48.作为示例的,本技术给出的一种具体实施中,s1包括以下步骤:获取固定拾音麦克风43和顶部拾音麦克风41所录制的声音并提取出第一声音信息,其中,第一声音信息包括接收时间差值信息、频率信息、振幅信息,固定拾音麦克风43为偶数个;基于每一对相对的固定拾音麦克风43和顶部拾音麦克风41所得到第一声音信息获取目标声源所处的方位信息并作为第一方位信息。
49.在该具体实施中,由于每一对相对的固定拾音麦克风43具有最大的距离差,因此相互配合能够获得更为精准的第一方位信息,多组固定拾音麦克风43可以获得多组第一方位信息,第一方位信息即为目标声源相对于录音笔的方向,通过多个第一方位信息进行加
权计算以初步获得声源的方位。
50.作为示例的,本技术给出的另一种具体实施中,s1包括以下步骤:获取固定拾音麦克风43和顶部拾音麦克风41所录制的声音并提取出第一声音信息,其中,第一声音信息包括接收时间差值信息、频率信息、振幅信息。
51.基于固定拾音麦克风43所得到第一声音信息获取目标声源所处的方位信息并作为第一方位信息。
52.在该具体实施中,利用多个固定拾音麦克风43配合获得一组方位信息,该方位信息位于第一参考面31上。
53.举个例子,获得第一方位信息可以采用以下算法得到:先设定目标声源的方向为θ,声音的时域频率为ω,声音在空气中的传播速度为v,目标声源发出的波束为k,则其中,λ是对应于频率ω的波长。由于目标声源的声音到达各个固定拾音麦克风的时间不同,则固定拾音麦克风阵列接收到的声音可以表示为:其中,τ
n
为第n个麦克风接收到的声音相对于固定主麦克风的时延,t表示转置,n为固定拾音麦克风的数量。根据上述公式和各个麦克风获取的目标声源的声音,可以得出目标声源在第一参考面上相对于录音笔的方向θ。
54.s2.驱动转动部22,以使得一斜向拾音麦克风42转动到顶部拾音麦克风41与固定主麦克风之间的圆弧上,并将该斜向拾音麦克风42作为斜向主麦克风。
55.s3.基于顶部拾音麦克风41、斜向主麦克风、固定主麦克风和第一方位信息对目标声源进行二次定位。
56.基于上述示意的具体实施,由于斜向拾音麦克风42有两个且相对于转动轴33对称使之,两条拾音弧7将连成一条拾音半圆弧,在该拾音弧7上依次设置有固定拾音麦克风43、斜向拾音麦克风42、顶部拾音麦克风41、斜向拾音麦克风42和固定拾音麦克风43,且第一圆心角51和第二圆心角52不同,结合上述公式,能够更精确地拾取声音。由于该种不同圆心角设置有效地放大麦克风接收到信息的不均衡性,以使得拾音弧7上的斜向拾音麦克风42和相邻的距离声源较近的麦克风以接收的声源方向上的声音信号为主拾音并进行定向拾音。
57.参照图4,作为示例的,本技术给出的一种具体实施中,s3包括以下步骤:s31.获取主拾音麦克风、斜向主麦克风和环境音麦克风所录制的声音并提取出第二声音信息,其中,第二声音信息包括接收时间差值信息、频率信息、振幅信息。
58.s32.基于第二声音信息获取目标声源所处的方位信息并作为第二方位信息。
59.s33.基于设有第一权重的第一方位信息和设有第二权重的第二方位信息确定目标声源的方位,其中,第二权重大于第一权重。
60.每一对相对的固定拾音麦克风43具有最大的距离差,因此相互配合能够获得更为精准的第一方位信息,通过多个第一方位信息进行加权计算以初步获得目标声源的方位。在垂直于第一参考面31的方向上,由于拾音弧7上的麦克风采用非等间距设置,能够更好地区分开环境音和目标发音,因此使得定位的加权计算时第二范围信息的权重更高。
61.s4.基于二次定位结果将顶部拾音麦克风41和固定主麦克风中靠近目标声源的一个作为主拾音麦克风,远离的一个作为环境音麦克风。
62.s5.基于主拾音麦克风与斜向主麦克风获取目标声源发出的拾音波束,并基于除了主拾音麦克风与斜向主麦克风之外的麦克风获取环境音,其中,环境音用于指示噪声,也就是除了目标声源外发出的声音。
63.s6.基于拾音波束和环境音对拾音波束进行降噪。
64.拾音弧7上的斜向拾音麦克风42和相邻的距离声源较近的麦克风以接收的声源方向上的声音信号为主拾音并进行定向拾音,其它麦克风在进行录音时对不同于主拾音频域的环境音进行抑制,从而提升拾音质量并保证识别效果。
65.参照图5,作为示例的,本技术给出的一种具体实施中,s6包括以下步骤:s61.基于拾音波束抑制除了主拾音麦克风与斜向主麦克风之外的麦克风进行声音录制。
66.s62.基于所述环境音对拾音波束进行降噪,以获得目标声源发出的声音。
67.作为补充的,这里的环境音广义上也包括录音笔内部所产生的噪音,比如转动部22转动时发出的摩擦声,电机6工作时发出的转动声、电流声,笔体1或转动部22内部设置的内部拾音麦克风44获取该类环境音以用于对拾音波束进行降噪。综上,麦克风在接收所有声音信号时对与发言者声音频率或波长不同的噪声进行抑制,提升拾音质量并保证识别效果。
68.本技术实施例还公开一种高清晰度的录音笔录音系统,包括:预定位模块,用于基于固定拾音麦克风43对目标声源进行预定位以获得第一方位信息,并将最靠近目标声源的固定拾音麦克风43作为固定主麦克风;对焦模块,驱动转动部22,以使得一斜向拾音麦克风42转动到顶部拾音麦克风41与固定主麦克风之间的圆弧上,并将该斜向拾音麦克风42作为斜向主麦克风;校准模块,基于顶部拾音麦克风41、斜向主麦克风、固定主麦克风和第一方位信息对目标声源进行二次定位;择向模块,基于二次定位结果将顶部拾音麦克风41和固定主麦克风中靠近目标声源的一个作为主拾音麦克风,远离的一个作为环境音麦克风;录音模块,基于主拾音麦克风与斜向主麦克风获取目标声源发出的拾音波束,并基于除了主拾音麦克风与斜向主麦克风之外的麦克风获取环境音;降噪模块,基于拾音波束和环境音对拾音波束进行降噪。
69.本技术实施例还公开一种主机,包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行如上述高清晰度的录音笔录音方法的计算机程序。本实施例方法的执行主体可以是一种控制装置,该控制装置设置在主机上,当前设备可以是具有wifi功能的手机,平板电脑,笔记本电脑等电子设备,本实施例方法的执行主体也可以直接是电子设备的cpu(central processing unit,中央处理器)。
70.本技术实施例还公开一种可读存储介质,存储有能够被处理器加载并执行如上的高清晰度的录音笔录音方法的计算机程序。通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本技术的技术
方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在如上的一个存储介质(如rom/ram、磁碟、光盘)中,包括若干指令用以使得一台设备(可以是手机,计算机,服务器,被控终端,或者网络设备等)执行本技术每个实施例的方法。
71.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。