1.本发明属于声源定位技术领域,具体涉及一种基于声源定位的车载语音控制方法和系统。
背景技术:
2.随着自动驾驶和智能座舱概念越来越热、呼声越来越高,对车载设备的要求越来越高,不仅需要实现功能,还需要将功能细化。目前市场上车载ivi已经能够实现基本的语音交互功能,这在一定程度上方便了驾乘人员,不过目前的产品不会对语音的来源进行判断,也就是说不管是谁,只要发出语音命令,系统都会自动执行相关功能,功能相对单一,且针对一些与驾驶安全相关的语音命令由指定人员发出更为安全。于是本发明提出一种基于声源定位的语音控制系统,该系统无需经过复杂计算,能够快速定位语音源,实现更安全操作的同时丰富了车机功能。
技术实现要素:
3.本发明要解决的技术问题是:提供一种基于声源定位的车载语音控制方法和系统,用于实现指定人员控制指定车辆功能。
4.本发明为解决上述技术问题所采取的技术方案为:一种基于声源定位的车载语音控制方法,包括以下步骤:
5.s1:搭建一种基于声源定位的车载语音控制系统,包括左前麦克风、右前麦克风、后麦克风、语音控制单元;左前麦克风与右前麦克风关于汽车纵轴左右对称安装;右前麦克风与后麦克风关于汽车横轴前后对称安装;语音控制单元的信号输入端分别连接左前麦克风、右前麦克风、后麦克风的信号输出端;
6.s2:驾乘人员以声波的形式发出语音控制指令,声波分别向左前麦克风、右前麦克风、后麦克风传递;
7.s3:左前麦克风、右前麦克风、后麦克风分别将收到的声信号转换成电信号,并传递给语音控制单元;
8.s4:语音控制单元将电信号解析成语音控制指令并打上时间戳作为顺序标志;
9.s5:语音控制单元根据接收到的语音控制指令的先后顺序,通过区域估计判断语音控制指令的声源的位置;在声源不移动的情况下,声源到任意两个麦克风的距离差一定;声源同时位于以左前麦克风和右前麦克风为焦点的左右双曲线和以右前麦克风和后麦克风为焦点的上下双曲线上;通过声源到左前麦克风和右前麦克风的距离差判断声源位于左右双曲线的左半部分曲线或右半部分曲线;通过声源到右前麦克风和后麦克风的距离差判断声源位于上下双曲线的上半部分曲线或下半部分曲线;左右双曲线与上下双曲线的交点坐标为声源的坐标。
10.按上述方案,所述的步骤s2中,具体步骤为:
11.设声源、左前麦克风、右前麦克风、后麦克风所在的点分别为b、a、d、f,则声波传递
路线分别为ba、bd、bf;设c和e分别为线路bd、bf上a和d的距离等效点,则:
12.l
ba
=l
bc
ꢀꢀ
(1),
13.l
bd
=l
be
ꢀꢀ
(2),
14.设声音在空气中的传播速度为v,则声波从b传递到a的时间为:
15.t
ba
=l
ba
/v
ꢀꢀ
(3),
16.声波从b传递到d的时间为:
17.t
bd
=l
bd
/v
ꢀꢀ
(4),
18.声波从b传递到f的时间为:
19.t
bf
=l
bf
/v
ꢀꢀ
(5)。
20.进一步的,所述的步骤s5中,具体步骤为:
21.s51:若t
bd
>t
ba
,则l
bd
>l
ba
,左前麦克风先于右前麦克风收到信号,声源位于以左前麦克风和右前麦克风为焦点的双曲线的左半部分曲线;
22.若t
bd
<t
ba
,则l
bd
<l
ba
,右前麦克风先于左前麦克风收到信号,声源位于以左前麦克风和右前麦克风为焦点的双曲线的右半部分曲线;
23.s52:若t
bf
>t
bd
,则l
bf
>l
bd
,右前麦克风先于后麦克风收到信号,声源位于以右前麦克风和后麦克风为焦点的双曲线的上半部分曲线;
24.若t
bf
<t
bd
,则l
bf
<l
bd
,后麦克风先于右前麦克风收到信号,声源位于以右前麦克风和后麦克风为焦点的双曲线的下半部分曲线;
25.s53:声源位于以左前麦克风和右前麦克风为焦点的双曲线的左半部分曲线,且位于以右前麦克风和后麦克风为焦点的双曲线的上半部分曲线时,声源为主驾驶座人员;
26.声源位于以左前麦克风和右前麦克风为焦点的双曲线的右半部分曲线,且位于以右前麦克风和后麦克风为焦点的双曲线的上半部分曲线时,声源为副驾驶座人员;
27.声源位于以左前麦克风和右前麦克风为焦点的双曲线的左半部分曲线,且位于以右前麦克风和后麦克风为焦点的双曲线的下半部分曲线时,声源为后左座人员;
28.声源位于以左前麦克风和右前麦克风为焦点的双曲线的右半部分曲线,且位于以右前麦克风和后麦克风为焦点的双曲线的下半部分曲线时,声源为后右座人员。
29.按上述方案,所述的步骤s3中,具体步骤为:信号传递采用fifo先进先出模式。
30.按上述方案,还包括以下步骤:
31.s6:语音控制单元通过设定执行车辆功能的特定位置的语音控制指令的权限,忽略其他位置下发的语音控制指令,决定是否执行收到语音控制指令。
32.一种基于声源定位的车载语音控制系统,包括左前麦克风、右前麦克风、后麦克风、语音控制单元;左前麦克风与右前麦克风关于汽车纵轴左右对称安装;右前麦克风与后麦克风关于汽车横轴前后对称安装;语音控制单元的信号输入端分别连接左前麦克风、右前麦克风、后麦克风的信号输出端。
33.一种计算机存储介质,其内存储有可被计算机处理器执行的计算机程序,该计算机程序执行一种基于声源定位的车载语音控制方法。
34.本发明的有益效果为:
35.1.本发明的一种基于声源定位的车载语音控制方法和系统,针对车内驾乘人员语音命令的竞争性,通过时间差方法判断语音源在车内的位置,按照设定选择是否执行,在保
证行驶安全性能的同时,丰富了人机交互功能和场景,实现了由指定人员控制指定车辆功能,增加了车辆使用的安全性。
36.2.本发明通过自定义包括主驾、副驾和后排乘客的语音命令使用者,选择多样,使用灵活。
37.3.本发明算例简单,无需经过复杂运算,提高了响应灵敏度。
38.4.本发明能够实现功能的自由切换,丰富了车载终端功能,提高了高级感。
39.5.本发明结构简单、成本低廉。
附图说明
40.图1是本发明实施例的麦克风安装位置图。
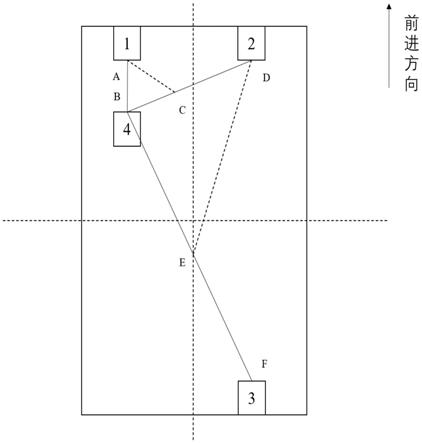
41.图2是本发明实施例的区域定位原理图。
42.图3是本发明实施例的区域定位流程图。
43.图中:1.左前麦克风;2.右前麦克风;3.后麦克风;4.声源。
具体实施方式
44.下面结合附图和具体实施方式对本发明作进一步详细的说明。
45.参见图3,本发明的实施例包括左前麦克风1、右前麦克风2、后麦克风3、语音控制单元等。左前麦克风1与右前麦克风2关于汽车纵轴左右对称安装,右前麦克风2与后麦克风3关于汽车横轴前后对称安装。
46.本发明的工作原理说明如下:
47.参见图1,左前麦克风1、右前麦克风2、后麦克风3安装固定,即坐标位置可知,声源4不可知。虽然声源位置未知,但是在声源4不移动的情况下,声源4到左前麦克风1和右前麦克风2的距离差一定,根据几何知识可知,声源4必在以左前麦克风1和右前麦克风2为焦点的双曲线上,同理声源4也必在以右前麦克风2和后麦克风3为焦点的双曲线上,两条双曲线的交点即为声源4的坐标。
48.参见图2,假设声源4位置在驾驶位。当驾驶员发出语音指令时,声波向左前麦克风1、右前麦克风2、后麦克风3传递,传递路线分别为ba、bd、bf,图中c和e是线路bd、bf上a和d的距离等效点,可以得到如下公式:
49.l
ba
=l
bc
ꢀꢀ①
50.l
bd
=l
be
ꢀꢀ②
51.声波从b传递到a的时间为t
ba
=l
ba
/v
ꢀꢀ③
52.声波从b传递到d的时间为t
bd
=l
bd
/v
ꢀꢀ④
53.声波从b传递到f的时间为t
bf
=l
bf
/v
ꢀꢀ⑤
54.式中v表示声音在空气中的传播速度。
55.当l
bd
>l
ba
时,t
bd
>t
ba
,左前麦克风1先于右前麦克风2收到信号,即声源4应该位于以1和2为焦点的双曲线的左边曲线上,当l
bf
>l
bd
时,t
bf
>t
bd
,右前麦克风2先于后麦克风3收到信号,声源4应该位于以右前麦克风2和后麦克风3为焦点的双曲线的上半部分曲线上,由此可以得出声源4应该位于左前区域,与图示相符。其他位置可按照此方法正确确定位置。
56.当语音控制指令下发后,左前麦克风1、右前麦克风2、后麦克风3将声信号转换成
电信号传递给语音控制单元,信号传递采用fifo先进先出模式。语音控制单元将电信号解析成对应命令的同时,给命令打上一个时间戳,作为顺序标志。语音控制单元根据接收到三个麦克风的命令的先后顺序,通过区域估计判断语音控制指令的声源4的位置是主驾驶座、副驾驶座、后左或者后右,并根据当前设定决定是否执行该语音控制指令。还可以通过设定如开启车道保持只能由驾驶人员发出的控制命令,忽略其他位置下发的类似指令,从而提高驾驶安全性。
57.区域定位算法如下:
58.59.[0060][0061]
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。