1.本发明主要涉及到飞行器噪声分析技术领域,特指一种基于级联滤波器的主旋翼和尾桨气动噪声分离方法,适用于直升机等主旋翼和尾桨组合的飞行器。
背景技术:
2.随着对飞行器(如直升机)对可靠性和舒适性的要求不断提高,噪声问题已成为限制直升机大规模应用的重要因素。直升机噪声的分析和控制具有挑战性,因为噪声是高度定向的,高度依赖于飞行条件,不稳定,并且由几个不同的噪声源组成。直升机的主要噪声源是主旋翼、尾桨、齿轮箱和涡轮。声学测量将记录所有这些噪声源的总和,根据测得的声压时间历程确定每个源的贡献并非易事。然而,为了理解、设计和评估降噪技术,识别单个噪声源是有帮助的。
3.主旋翼、尾桨气动噪声作为直升机的主要噪声源,应分开进行单独降噪研究。由于转子的耦合,在运行中会产生高水平的空气动力学噪声桨叶和空气,占直升机噪声的主要部分。转子气动噪声根据频域特性可分为音调噪声和宽带噪声。音调噪声主要由厚度噪声、载荷噪声、叶片涡相互作用(blade
‑
vortex interaction,bvi)噪声和高速脉冲噪声组成,它主要是叶片通过频率(bpf)及其高次谐波的离散音调。载荷噪声和厚度噪声也统称为“旋转噪声”。转子噪声的低频部分由叶片气动力的旋转过程和脉动上升的风量构成,是现代直升机噪音最严重的部分。直升机的整体噪音水平在影响中起着至关重要的作用。宽带噪声是由叶片表面附近的湍流引起的,在频谱中连续分布。
4.现有技术中,传统的经典方法只考虑主旋翼、尾桨气动噪声的周期特性进行谐波分离。由于宽带噪声的随机性,分离时通常不被考虑,这导致了传统的主旋翼和尾桨气动噪声分离方法不准确。
5.旋翼气动噪声分析的经典方法主要集中在基于 ffowcs williams
‑
hawkings 方程的噪声预测和数值模拟上。国外,lowson和wright开发了一些最早将噪声预测理论应用于直升机旋翼的应用,进行了许多关于音调噪声和宽带噪声预测的研究。但是,基于公式的噪声预测和数值模拟计算量大,鲁棒性低,不能很好地应用于实际主旋翼和尾桨的气动噪声分离。因此,噪声分离问题可以通过使用基于信号处理的方法来解决。
6.旋翼气动噪声的分离可以看作是一个信号分解问题。目前为止,已经有一些通用的信号处理技术用于声学分析中的信号分解。经验模态分解(empirical mode decomposition,emd)是其中一种强大且广泛使用的方法,emd广泛用于旋转机械声源的盲源分离。emd方法的变体(例如集成经验模态分解 (ensemble empirical mode decomposition,eemd),以及变分模式分解 (variational mode decomposition,vmd))被开发来改进这项技术。使用此类方法的分解信号不一定代表与特定机械源相关联的组件。因此,这些方法不适用于分离主旋翼和尾桨气动噪声。
7.主旋翼和尾桨的噪声主要包括叶片通过频率(bpf)的离散音调及其高次谐波。因此,大多数分离主旋翼和尾桨噪声的方法依赖于这些旋翼的不同转速及其相应的不同bpf。
8.例如,有从业者提出一种基于多叶片通道时间平均的分离方法。该方法将时间信号划分为时间窗,其长度等于主旋翼或尾旋翼叶片通过周期,然后使用条件平均技术对这些窗口进行平均,并留下平均的主旋翼或尾旋翼信号。
9.另有从业者olsman等人提出了一种将经典傅立叶级数方法推广到非周期非平稳数据的方法。该技术旨在使用时变傅立叶级数系数的三次hermite
‑
b样条插值来分离主旋翼和尾桨噪声。这些方法仅根据其谐波特性分离转子气动噪声,即分离音调噪声而未考虑分离宽带噪声。但是,仅考虑音调噪声分离会导致分离不够准确。
10.目前的分离方法仅考虑旋翼气动噪声的谐波特性,采用谐波提取方法分离主、尾旋翼的音调噪声,导致分离结果不精确。本发明根据音调噪声的周期特性和调制宽带噪声的二阶循环平稳性,利用vold
‑
kalman滤波器和循环维纳滤波器,提出了一种级联滤波方法,将主旋翼和尾桨的音调和调制宽带噪声分离。级联滤波方法考虑了旋翼调制宽带噪声的分离,使得主旋翼和尾桨气动噪声分离更加准确,填补了前人对主旋翼和尾桨噪声分离研究的空白。
技术实现要素:
11.本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种原理简单、操作简便、精度高的基于级联滤波器的旋翼和尾桨气动噪声分离方法。
12.为解决上述技术问题,本发明采用以下技术方案:一种基于级联滤波器的旋翼和尾桨气动噪声分离方法,其包括:使用vold
‑
kalman滤波器来跟踪叶片通过频率谐波的特定级数,以分别提取主旋翼噪声和尾桨谐波噪声;利用宽带噪声的二阶循环平稳特征,利用循环维纳滤波器对剩余的宽带噪声进行过滤,以实现对主旋翼宽带噪声和尾桨宽带噪声的过滤。
13.作为本发明方法的进一步改进:对于主旋翼和尾桨的宽带噪声,分别使用叶片通过频率和多次谐波作为循环维纳滤波的频移输入,提取的主旋翼宽带噪声时域信号和噪声功率谱密度(power spectral density,psd)。
14.作为本发明方法的进一步改进:对主旋翼和尾桨的宽频噪声进行循环谱分析以获得循环平稳特征,进而分离出主旋翼宽频噪声的增强包络频谱ees(enhanced envelope spectrum, ees),从增强包络频谱ees的图中得到主旋翼和尾桨的bpf(blade passing frequency, bpf)及其高次谐波。
15.作为本发明方法的进一步改进:利用循环维纳滤波器进行过滤的流程包括:将主旋翼和尾旋翼的调制宽带噪声和从用vold
‑
kalman滤波器提取音调噪声后的剩余宽带噪声中分离:其中下标mr表示主旋翼,tr表示尾桨,b代表宽带,代表环境宽带噪声。主旋翼和尾旋翼的调制宽带噪声为循环平稳信号;频谱冗余用来从残留的宽带噪声中估计,在频域中的每个循环频率上移动信号,其中,表示主旋翼
或尾桨的叶片通过频率和高次谐波的循环频率集;所述估计被表示为一个回归问题:其中下标s表示待分离信号,k表示循环频率的数量,f代表信号频率,其中表示主旋翼或尾旋翼在频域中的估计宽带噪声,是设计的滤波器在频率时的频率响应,k是循环频率的数量;频率对应的减级的表述如下:假设是剩余宽带噪声矢量的频移观测矢量,表示为,其中是主旋翼或尾旋翼的循环频率,那么减级循环回归的公式被表述为矢量形式;目标是找到一个转移矩阵,使估计的结果:寻找以下的解:在秩的等效约束下,谱系被定义为。
16.作为本发明方法的进一步改进:施加约束是为了迫使只有一个循环平稳源的准确性,当观察到更多的循环平稳源时,这个数字相应地改变:其中,为与的第一特征值相关的特征向量;其中频谱矩阵和被定义为和,通过welch方法估计,提取主旋翼和尾桨的调制宽带噪声和。
17.作为本发明方法的进一步改进:所述vold
‑
kalman滤波器包括结构方程和测量方程。
18.作为本发明方法的进一步改进:将直升机主旋翼和尾旋翼的谐波气动噪声表示为:其中是所有独立旋转轴的集合,是由轴生成的相关阶次的离散集合;由流动噪声、湍流和瞬态事件产生的宽带声在实际的直升机旋翼空气动力噪声测量中,总的测量信号的形式将是:其中是因果关系,与不相关。
19.作为本发明方法的进一步改进:从记录的响应和阶数的轴旋转速度,将阶数跟踪转换为复数包络估计问题;结构方程规定,复数包络与载波信号相比是平滑和缓慢变化的,对包络进行规定是要求重复差值满足如下方程之一:其中表示差序为的差分算子,是一个小的非均质项;估计的复数包络函数与测量数据相关,通过测量方程实现:未知的复数包络函数在结构方程和测量方程以测量系数的形式出现,通过选择一个加权函数,并舍弃作为多余参数的未测量函数和,得到线性超定方程组,构建一个加权线性最小二乘法问题:其中,大值的强制要求时间点周围的平稳性,而小值则允许观察到的数据在这个时间点上主导估计结果。
20.作为本发明方法的进一步改进:当复数包络被估计时,主旋翼和尾旋翼的音调噪声被提取出来:其中和是分别对应于主旋翼和尾旋翼的叶频谐波的离散阶次集。
21.对于一个有叶片的主旋翼和一个有叶片的尾旋翼,bpf阶次集和为:为:。
22.与现有技术相比,本发明的优点就在于:1、本发明的基于级联滤波器的旋翼和尾桨气动噪声分离方法,原理简单、操作简便、精度高,其根据音调噪声的周期特性和调制宽带噪声的二阶循环平稳性,利用vold
‑
kalman滤波器和循环维纳滤波器,提出了一种级联滤波方法,将主旋翼和尾桨的音调和调制宽带噪声分离。本发明中的级联滤波方法考虑了旋翼调制宽带噪声的分离,使得主旋翼和尾桨气动噪声分离更加准确,填补了前人对主旋翼和尾桨噪声分离研究的空白。本发明
解决了现有的噪声分离方法仅考虑旋翼气动噪声的谐波特性,采用谐波提取方法分离主旋翼和尾桨的音调噪声、导致分离结果不精确的问题。
23.2、本发明的基于级联滤波器的旋翼和尾桨气动噪声分离方法,为使用vold
‑
kalman滤波器和循环维纳滤波器的级联滤波方法来分别分离主旋翼和尾旋翼的音调和调制宽带噪声。由于转子旋转运动的周期性调制,宽带噪声表现出二阶循环平稳性。根据其循环平稳性,本发明所提出的方法在考虑谐波分离的音调噪声周期性的同时,也进行了宽带噪声的分离。通过这种方法可以获得更精确的主旋翼和尾旋翼的分离。
附图说明
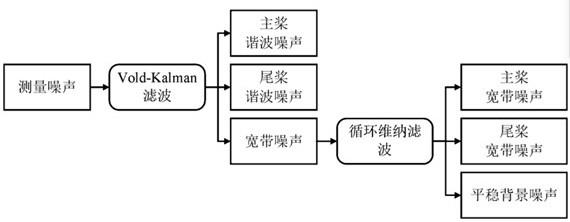
24.图1是本发明方法的流程示意图。
25.图2是本发明在具体应用实例中vold
‑
kalman滤波器的组成原理示意图。
26.图3是本发明在具体应用实例中基于welch方法估计的循环维纳滤波的实现过程示意图。
27.图4是本发明在具体应用实例中直升机噪声时域信号的示意图。
28.图5是本发明在具体应用实例中直升机噪声噪声测量的功率谱密度示意图。
29.图6是本发明在具体应用实例中提取的主、尾旋翼音调噪声的时域信号示意图;其中(a)为提取的主旋翼噪声时域信号;(b)为尾桨噪声时域信号。
30.图7是本发明在具体应用实例中提取音调噪声的功率谱密度示意图。
31.图8是本发明在具体应用实例中vold
‑
kalman滤波后的时域信号示意图。
32.图9是本发明在具体应用实例中提取的主旋翼宽带噪声时域信号和噪声psd结果示意图;其中(a)为提取的主旋翼宽带噪声时域信号 ;(b)为主旋翼宽带噪声psd。
33.图10是本发明在具体应用实例中主旋翼宽频噪声的增强包络频谱示意图。
34.图11是本发明在具体应用实例中的详细流程示意图。
具体实施方式
35.以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
36.如图1和图11所示,本发明的基于级联滤波器的旋翼和尾桨气动噪声分离方法,包括:使用vold
‑
kalman滤波器来跟踪叶片通过频率谐波的特定级数,以分别提取主桨噪声(主旋翼噪声)和尾桨谐波噪声。
37.利用宽带噪声的二阶循环平稳特征,利用循环维纳滤波器对剩余的宽带噪声进行过滤,以实现对主桨宽带噪声(主旋翼宽带噪声)和尾桨宽带噪声的最佳过滤。
38.在具体应用实例中,本发明的vold
‑
kalman滤波器主要用来进行音调噪声分离。其中,vold
‑
kalman滤波器是一种时域跟踪滤波器,适合从旋转机械噪声信号中分离出旋转频率谐波。
39.直升机旋翼音调噪声主要包括主旋翼和尾桨的轴频谐波及其叶片通过频率谐波。所有这些频率成分基本上都是主桨(主旋翼)或尾桨的轴频的谐波。
40.在具体应用实例中,如图2所述,vold
‑
kalman滤波器包括结构方程和测量方程。
41.结合图3,以一个轴为例,轴的瞬时转速(以每秒转数计)表示为。瞬时旋转角
度是旋转速度的时间积分,属于k阶的复相位量(complex phase quantity)定义为:(1)那么一个复序时间关系可以定义为:(2)其中是一个缓慢变化的复数包络。同样的格式也适用于尾桨轴。
42.那么,直升机主旋翼和尾旋翼的谐波气动噪声的一般情况可表示为:(3)其中是所有独立旋转轴的集合,是由轴生成的相关阶次的离散集合。由流动噪声、湍流和瞬态事件产生的宽带声在实际的直升机旋翼空气动力噪声测量中,也记录在公式(10)的周期的音调噪声的总和中。总的测量信号的形式将是:(4)其中是因果关系,与不相关。
43.一个有限的无别名的响应时间关系已经被离散化,其中采样率被设定为每秒1个样本,不存在任何一般性的损失。轴的轴旋转速度也被假定为通过观察编码器或转速计获得。
44.然后,从记录的响应和阶数的轴旋转速度,将阶数跟踪转换为复数包络估计问题。
45.在本发明中,vold
‑
kalman滤波器通过在结构方程和测量方程之间进行折衷,与经典的kalman滤波器相关,在vold
‑
kalman滤波器中只使用两组方程之间的比率。
46.结构方程规定,由于转子的惯性,复数包络与载波信号相比应该是平滑和缓慢变化的。对包络进行规定的一种方法是要求重复差值应该很小,例如,满足如下方程之一:其中表示差序为的差分算子,是一个小的非均质项。除了结构方程的平稳性条件外,估计的复数包络函数必须以某种方式与测量数据相关,这一点可通过测量方程实现:
(8)未知的复数包络函数在结构方程和测量方程的左手边以测量系数的形式出现,因此可以通过选择一个加权函数,并舍弃作为多余参数的未测量函数和,得到线性超定方程组,构建一个加权线性最小二乘法问题。
47.其中,大值的强制要求时间点周围的平稳性,而小值则允许观察到的数据在这个时间点上主导估计结果。
48.基本公式(9)和公式(10)通常作为一个线性最小二乘法问题来解决。
49.然后,当复数包络被估计时,主旋翼和尾旋翼的音调噪声可以很容易地被提取出来。
50.其中和是分别对应于主旋翼和尾旋翼的叶频谐波的离散阶次集。
51.对于一个有叶片的主旋翼和一个有叶片的尾旋翼,bpf阶次集和为:在具体应用实例中,本发明利用循环维纳滤波器进行宽带噪声分离,级联滤波器的第二阶段是将主旋翼和尾旋翼的调制宽带噪声和从用vold
‑
kalman滤波器提取音调噪声后的剩余宽带噪声中分离。
52.主旋翼和尾旋翼的调制宽带噪声为循环平稳信号。从噪声测量中分离循环平稳源的方法是采用循环维纳滤波器。频谱冗余可以用来从残留的宽带噪声中估计,方法是设计一个最佳滤波器,在频域中的每个循环频率上移动信号,其中,表示主旋翼或尾桨的叶片通过频率和高次谐波的循环频率集。在移位的循环频率上对测量进行滤波对噪声是破坏性的,而由于平均效应,对所需的源是建设性的。因此,该估计可以被表示为一个回归问题。
53.其中表示主旋翼或尾旋翼在频域中的估计宽带噪声(cs2信号),是设计的滤波器在频率时的频率响应,k是循环频率的数量。公式(16)的频率对应的减级(假设循环平稳源的数量有限)表述如下。
54.假设是剩余宽带噪声矢量的频移观测矢量,表示为,其中是主旋翼或尾旋翼的循环频率。那么,减级循环回归的公式(16)可以被表述为矢量形式。因此,目标是找到一个转移矩阵,使估计的结果:这个问题可以通过寻找以下的解来解决:在秩的等效约束下,谱系被定义为。需要注意的是,施加秩一约束是为了迫使只有一个循环平稳源的准确性,当观察到更多的循环平稳源时,这个数字应该相应地改变。这个优化问题的解决方案给出了(19)其中,为与第一特征值相关的特征向量。
55.(20)其中频谱矩阵和被定义为和,可以通过welch方法估计。基于welch方法估计的循环维纳滤波的实现过程如图5所示。因此,主旋翼和尾桨的调制宽带噪声和可以用公式(16)提取。
56.以下将以一个直升机全机噪声风洞试验为例,对本发明提出的级联滤波主尾桨噪声分离方法有效性进行验证。试验中,直升机缩比模型为悬停状态。主旋翼和尾桨分别以1428转/分钟和7230转/分钟的速度一起旋转。
57.根据理论计算得到,主旋翼轴频,尾桨轴频,主旋翼通过频率,尾桨通过频率。噪声通过麦克风进行采集拾取,采样频率为102.4khz,采集时间为20秒。麦克风采集得到的时域信号如图4所示。
58.噪声测量的功率谱密度(psd)如图5所示。主旋翼和尾旋翼的音调噪声的叶片通过频率分量和高次谐波都可以清楚地看到,分别在图中以三角和圆圈标出。
59.将本发明所提出的级联滤波方法应用于该测量信号以分离主旋翼和尾桨的音调和宽带噪声。
60.步骤s1:利用本发明提出的vold
‑
kalman滤波器(通过公式1
‑
14),提取主旋翼和尾旋翼的音调噪声。
61.提取的主、尾旋翼音调噪声的时域信号分别如图6(a)和图6(b)所示。提取的音调噪声的功率谱密度(psd)如图7所示。原始测量的psd、提取的主旋翼音调噪声和提取的尾旋翼音调噪声分别用黑色实线、黑色虚线和灰色实线绘制在图形窗口中。从图中可以看出,提取的主旋翼和尾桨的音调噪声与原始桨叶通过频率分量吻合,从而验证了所提方法第一步(vold
‑
kalman滤波器)提取主旋翼和尾旋翼的音调噪声方法的有效性。
62.经过 vold
‑
kalman 滤波提取音调噪声后,剩余信号为宽带噪声信号。滤波后时域信号如图8所示。
63.步骤s2:使用本发明提出的循环维纳滤波器,通过公式15
‑
20,从剩余的宽带噪声中分离主旋翼和尾桨的宽带噪声。
64.对于主旋翼和尾桨宽带噪声,分别使用叶片通过频率和多次谐波作为循环维纳滤波的频移输入。提取的主旋翼宽带噪声时域信号和噪声psd结果如图9(a)、(b)所示。
65.为了验证算法的有效性,进一步对主旋翼宽频噪声进行循环谱分析以获得更多的循环平稳特征,分离出主旋翼宽频噪声的增强包络频谱(ees),如图10所示。从ees图中可以清晰地看到主旋翼的bpf及其高次谐波,在ees中用三角圈出,说明了本发明方法对主旋翼宽带噪声进行了良好的分离。
66.同理可知,尾桨宽带噪声分离与上述对主旋翼的分析方法类似,此处就不再赘述。
67.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。