1.本发明属于物联网领域和人机交互领域,尤其涉及一种智能语音控制系统和终端。
背景技术:
2.随着人工智能和物联网技术的发展,各种人机交互的方式正在改变着人们日常的工作和生活。尤其是对各种终端设备的控制,各种不同的交互方式都得到了广泛的关注和应用。例如,常用的触摸控制,手势控制等。近年来语音交互能够通过智能对话与即时问答方式实现语音控制、信息查询等功能。借着人工智能和大数据分析技术的进一步完善,语音识别和交互控制正吸引着越来越多的目光。由于语音控制不需要用户进行任何触摸或者手部动作操作,能够更加人性化地适用于各种用户群体。
3.在现有技术中,终端采集到用户语音中的特定关键字后启动语音操作。目前在语音技术提供商以及智能家居设备厂商大多采用云对终端的在线方式对接,大部分厂商的语音控制设备使用直接的语音收集系统来收集用户发出的语音。但是,目前语音控制的安全性和单一的功能性成为目前终端用户十分顾虑的问题。特别是一些对安全性要求较高的设备或场景,比如医院,银行,军工设备等,对语音控制的安全性提出了前所未有的挑战。
技术实现要素:
4.本发明实施例提供了一种具有空间位置识别功能的语音控制系统,用于提高语音控制的安全性,防止误触发的发生;并且能够为语音控制的同时提供多一维的控制机制。
5.为了解决上面提到的技术问题,本发明采用的技术方案如下:
6.以本发明的语音控制系统为空间原点,对周边空间进行区域划分;例如以相距原点的距离远近不同进行划分,或者以相对于语音控制系统的方位,以不同的角度范围进行空间区域划分;经划分后,空间可以分别命名为预设空间区域1,预设空间区域2,
……
等等。
7.空间位置识别模块:无线信号发射器向周围发射无线信号,信号可以是超声波或者不可见光,例如波长850纳米的红外光等;无线信号在到达用户时,部分或者全部会被用户反射回来;无线信号接收器用来接收经用户反射回的信号,并且通过与发射器比较然后定位出用户所处的位置信息。
8.根据空间位置识别模块定位出的用户位置信息,确定用户所处的预设空间区域。
9.根据用户所处的预设空间区域的不同,决定是否激活控制麦克风开始采集周围的语音信息。
10.语音识别和控制模块从采集到的语音信息中提取出目标词汇,并结合用户所处的预设空间区域,对同一终端设备发出不同的控制命令;或者根据用户所处的不同预设空间区域,对不同的终端设备发出操作命令。
11.本发明实施例提供了一种提高语音控制安全性,防止误触发的方法;根据空间位置的识别,所述的语音控制系统可以设置为仅响应预设空间区域内的语音信息,而对来自
于预设空间区域之外的语音信号完全没有响应;这样就可以极大地提高语音控制系统的安全性,避免被盗用或者误触发。
12.本发明实施例中,实时监测用户空间位置信息;根据用户所处位置,开启与所述终端的语音交互功能;这样,若用户需要和终端进行多种交互,或者用户需要与多个终端进行交互,可以利用所述的用户位置信息进行多一维的分类处理,而不需要多次对终端进行操作,能够极大减化用户操作的复杂度。
13.本发明实施例还提供一种终端,包括:空间位置识别模块,控制麦克风模块,语音识别和控制模块,存储器、处理器及存储在存储器上的目标词汇与并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的空间位置识别和语音交互控制的步骤。
附图说明
14.为了更加准确地说明本技术方案,便于对本发明的内容进一步地理解,下面将以附图的形式对实施例作一一介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。图1是本发明实施例提供的语音控制系统的流程图;
15.图2显示了本发明公开的空间位置识别的预设空间区域划分方式之一;
16.图3显示了另外一种预设空间区域划分方式;
17.图4显示了以超声波实现空间定位的语音控制系统实施例;
18.图5显示了以红外视觉实现空间位置识别的语音控制系统实施例;
具体实施方式
19.下面将结合本技术中的附图,对本技术公开的技术方案进行清楚、完整地描述;显然,所描述的实施例仅代表一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的全部其他实施例,都属于本技术保护的范围。
20.本发明的主要优点在于通过对用户所处空间位置的定位,可以增强传统语音控制系统的安全性,防止预设区域之外人员的误操作或者其它侵入性的操作,大大降低系统被误触发的几率。
21.相对于现有技术中的解决方案,本发明公开的技术可以让用户能够更加安全和智能地对终端设备进行操控;本发明公开的语音控制系统通过结合用户的位置信息对终端设备发出更加精细和直接的命令;例如,根据用户所处的位置自动调整终端设备的工作方向;根据用户所处位置决定是否响应用户发出的语音命令。
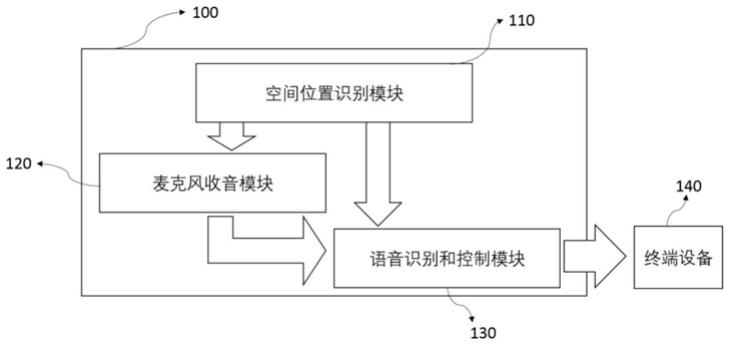
22.图1是本发明公开的语音控制系统的结构流程图;整个语音控制系统100由空间位置识别模块110,麦克风收音模块120,语音识别和控制模块130组成;语音控制系统100再通过有线或者无线的方式与终端设备140交互;具体交互流程如下:
23.第一,空间位置识别模块110实时地监控用户所处的空间位置变化,一旦监测到用户处于有效的预设空间区域内,便通知并激活麦克风收音模块120,同时将用户所处的空间位置信息发送到语音识别和控制模块130;
24.如果空间位置识别模块110检测到用户处于预设空间区域之外,则空间识别模块110不向麦克风收音模块120和语音识别和控制模块130传递指令,而是保持实时监控状态;或者
25.这种情况下,空间识别模块110可以向语音识别和控制模块130发出指令:提醒用户目前处于有效的预设空间区域之外。
26.第二,麦克风收音模块120经激活后,开始收集周围的语音信息,并将收集到的信息传送到语音识别和控制模块130。
27.第三,语音识别和控制模块130将接收到的语音信息与内部预设的目标词汇库进行比对,然后将检测到的目标词汇和从空间位置识别模块110获取的用户空间位置信息综合后发送到终端设备。
28.预设空间区域可以以不同的方式进行划分:
29.图2给出了一种空间区域的划分方式;以本技术公开的语音控制系统200作为空间的原点,并放置于终端设备的面板上或者附近的墙壁上220;230为语音控制系统的面向方位;根据与所述空间原点的距离的不同,可以把空间划分为211,212,213
……
,等不同的几个预设空间区域;例如最简单的一种是将语音控制系统200设置为仅响应211区域内的语音命令,而对距离大于211区域之外的语音信息不做响应;这样可以实现对终端设备的近距离控制,从而避免受远距离语音的干扰;另外一种是把来自不同空间区域211,212和213的语音命令设置为对不同终端设备的控制,或者对同一终端的不同部分进行控制,这样可以分区域地实施相应的语音操作。
30.图3是另外一种空间区域的划分方式;同样以本技术公开的语音控制系统300作为空间的原点,并放置于终端设备的面板上或者附近的墙壁上320;330为本语音控制系统的面向方位;根据与330所成角度的不同,可以将空间划分为311,312,313,314,315,316
……
,等不同的角度范围,每个角度范围为一个预设的空间区域;例如,可以将语音控制系统300设置为仅响应角度空间313和314区域内发出的语音信号,这样可以实现终端设备仅对来自一定方向内的语音敏感,而对大角度的语音信息不做响应;另外一种设置是把来自不同角度范围311,312,313,314,315,316内的语音信号进行编码,用来实现相应的对终端设备的不同控制操作;例如,可以根据用户所处的角度范围对终端设备的工作朝向进行调整。
31.图4是根据本技术公开方法的一个实施例:整个实施例的语音控制系统400包括:超声波测距模块410,麦克风收音矩阵421-424,语音识别与控制模块430;整个400系统可通过有线连接或者无线连接的方式与终端设备440保持通信;为了避免声波信号的相互干扰,四个麦克风收音模块421-424分别置于语音控制系统的四个角落;这样的放置在保证不受超声波信号干扰的前提下,还能够达到对周围空间均匀地收音效果;所述空间位置识别模块利用超声波作为载波,通过检测被用户反射回来的超声波信号,来达到定位用户所处空间位置的目的。
32.图5是本技术公开方法的另一个实施例;整个实施例的语音控制系统500包括:空间位置识别模块510,麦克风收音矩阵521-524,语音识别与控制模块530;整个500系统可通过有线连接或者无线连接的方式与终端设备540保持通信;其中空间位置识别模块510由光学信号发生器511和光电探测器512组成;光学信号发生器511向外发射光波,例如波长为850纳米或者980纳米或者1550纳米的光;光电探测器512用来检测被用户反射回来的光波,
通过分析光电探测器512看到的图像,可以准确定位用户所处的空间位置。
33.在本技术所提供的几个实施例中,应该理解为,所公开的方法和装置,也可以通过其它的方式实现。例如,以上所描述的单元模块的划分,仅仅为一种逻辑功能的描述,实现时可以有不同的实现方式,例如多个单元或组件可以结合或者可以集成到一个系统。
34.以上实施例仅用以说明本技术的技术方案,而非对其限制;本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。