1.本实用新型涉及一种清理设备,具体说是一种遥控式粪道推粪机器人。
背景技术:
2.目前猪舍粪道内水泡粪大多为人工清理,机械化程度低,粪道空间有限,光线查,人工清理操作不方便,看不清楚的部位清理不彻底,会造成粪道清理不彻底,另外,人工清理存在主观性,会造成视线、空间密闭的粪道未清理。
技术实现要素:
3.为了解决上述问题,本实用新型的目的是提供一种遥控式粪道推粪机器人
4.为实现上述目的,本实用新型的技术方案为:一种遥控式粪道推粪机器人,包括具有遥控功能的履带式机器人底盘和通过推杆连接组件固定在履带式机器人底盘前端的推铲组件,推铲组件包括前端及上方开口的铲体和铲体底面设置的多个凹陷形成的轮罩,轮罩内支撑有可自由转动的车轮,推杆连接组件包括与履带式机器人底盘固定连接的推杆固定横梁和推杆连接板,铲体后端以及推杆固定横梁的两侧分别固定有一对相互隔开的横梁堵板,同侧的一对横梁堵板之间通过一条推杆连接板以及螺栓螺母转动连接,推杆连接板之间的推杆固定横梁固定有竖直的限位板,推杆连接板之间固定连接的限位杆支撑在限位板的限位槽内。
5.进一步地,履带式机器人底盘支架的前端顶部固定有罩壳,罩壳的前侧开口覆盖透明的亚力克板,罩壳内分别固定有照明灯和摄像头,照明灯和摄像头与履带式机器人底盘内的电路电连接。
6.进一步地,罩壳的顶部设置有覆盖罩壳且向前后延伸的前遮挡板。
7.进一步地,履带式机器人底盘的尾部设置有倾斜的后遮挡板。
8.进一步地,螺栓螺母贯穿推杆连接板的部位分别套有隔套。
9.进一步地,履带式机器人底盘的外壳顶部分别在对角线部位设置有吊环。
10.本实用新型是一种适合狭窄粪道内水泡粪的自动推粪清理装置,可用于猪舍粪道内水泡粪的清理,极大的解放了人力,节省劳动成本,而且推铲组件具有限位结构,可以更好地铲起粪污,清理效果更好地更彻底。本实用新型提供了一种安全的推粪清理模式,为畜禽的生长环境提供了安全保障。
附图说明
11.现结合附图对本实用新型做进一步说明。
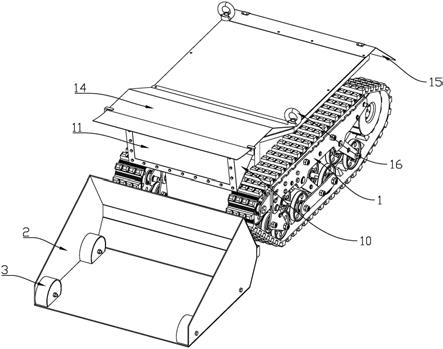
12.图1为本实用新型的立体结构示意图;
13.图2为本实用新型的主视结构示意图;
14.图3为本实用新型的俯视内部结构示意图。
具体实施方式
15.如图1-3所示,一种遥控式粪道推粪机器人,包括具有遥控功能的履带式机器人底盘1和通过推杆连接组件固定在履带式机器人底盘1前端的推铲组件,推铲组件包括前端及上方开口的铲体2和铲体2底面设置的多个凹陷形成的轮罩3,轮罩3内支撑有可自由转动的车轮4,车轮4为3寸尼龙小轮,推杆连接组件包括与履带式机器人底盘1固定连接的推杆固定横梁5和推杆连接板6,铲体2后端以及推杆固定横梁5的两侧分别固定有一对相互隔开的横梁堵板7,同侧的一对横梁堵板7之间通过一条推杆连接板6以及螺栓螺母转动连接,推杆连接板6之间的推杆固定横梁5固定有竖直的限位板8,推杆连接板6之间固定连接的限位杆9支撑在限位板8的限位槽内,且螺栓螺母贯穿推杆连接板6的部位分别套有隔套,罩壳10的顶部设置有覆盖罩壳10且向前后延伸的前遮挡板14,履带式机器人底盘1的尾部设置有倾斜的后遮挡板15。
16.为了便于看清清理前方视线,履带式机器人底盘1支架的前端顶部固定有罩壳10,罩壳10的前侧开口覆盖透明的亚力克板11,罩壳10内分别固定有照明灯12和摄像头13,照明灯12和摄像头13与履带式机器人底盘1内的电路电连接,照明灯12为三排led长条射灯。
17.为了便于吊装,履带式机器人底盘1的外壳顶部分别在对角线部位设置有吊环16。
18.本实用新型工作原理:将本实用新型放入粪道内,启动履带式机器人底盘1程序,通过摄像头13实时拍摄视频传输到遥控器接收端,履带式机器人底盘1前进推动推铲组件向前移动,对粪道内水泡粪进行清理,将粪推到粪道漏粪口出,达到清理粪道内水泡粪的目的。
19.以上所述仅为本实用新型示意性的具体实施方式,并非用以限定本实用新型的范围。任何本领域的技术人员,在不脱离本实用新型的构思和原则的前提下所作出的等同变化与修改,均应属于本实用新型保护的范围。
技术特征:
1.一种遥控式粪道推粪机器人,包括具有遥控功能的履带式机器人底盘(1)和通过推杆连接组件固定在履带式机器人底盘(1)前端的推铲组件,其特征在于:推铲组件包括前端及上方开口的铲体(2)和铲体(2)底面设置的多个凹陷形成的轮罩(3),轮罩(3)内支撑有可自由转动的车轮(4),推杆连接组件包括与履带式机器人底盘(1)固定连接的推杆固定横梁(5)和推杆连接板(6),铲体(2)后端以及推杆固定横梁(5)的两侧分别固定有一对相互隔开的横梁堵板(7),同侧的一对横梁堵板(7)之间通过一条推杆连接板(6)以及螺栓螺母转动连接,推杆连接板(6)之间的推杆固定横梁(5)固定有竖直的限位板(8),推杆连接板(6)之间固定连接的限位杆(9)支撑在限位板(8)的限位槽内。2.如权利要求1所述的一种遥控式粪道推粪机器人,其特征在于:履带式机器人底盘(1)支架的前端顶部固定有罩壳(10),罩壳(10)的前侧开口覆盖透明的亚力克板(11),罩壳(10)内分别固定有照明灯(12)和摄像头(13),照明灯(12)和摄像头(13)与履带式机器人底盘(1)内的电路电连接。3.如权利要求2所述的一种遥控式粪道推粪机器人,其特征在于:罩壳(10)的顶部设置有覆盖罩壳(10)且向前后延伸的前遮挡板(14)。4.如权利要求1所述的一种遥控式粪道推粪机器人,其特征在于:履带式机器人底盘(1)的尾部设置有倾斜的后遮挡板(15)。5.如权利要求1所述的一种遥控式粪道推粪机器人,其特征在于:螺栓螺母贯穿推杆连接板(6)的部位分别套有隔套。6.如权利要求1所述的一种遥控式粪道推粪机器人,其特征在于:履带式机器人底盘(1)的外壳顶部分别在对角线部位设置有吊环(16)。
技术总结
本实用新型公开了一种遥控式粪道推粪机器人,包括履带式机器人底盘和通过推杆连接组件固定在履带式机器人底盘前端的推铲组件,推铲组件包括前端及上方开口的铲体和铲体底面设置的多个凹陷形成的轮罩,轮罩内支撑有可自由转动的车轮,推杆连接组件包括与履带式机器人底盘固定连接的推杆固定横梁和推杆连接板,铲体后端以及推杆固定横梁的两侧分别固定有一对相互隔开的横梁堵板,同侧的一对横梁堵板之间通过一条推杆连接板以及螺栓螺母转动连接。本实用新型可用于猪舍粪道内水泡粪的清理,可以更好地铲起粪污,清理效果更好地更彻底。底。底。
技术研发人员:刘红光 廖俊涛 南永刚 李琪琪 李朋朋
受保护的技术使用者:中沃技术研究(山东)有限公司
技术研发日:2021.09.06
技术公布日:2022/1/14