1.本实用新型涉及果园设备技术领域,具体涉及一种山地梯田果园采收机械装置。
背景技术:
2.梯田是在山坡地上沿等高线方向修筑的条状阶台式或波浪式断面的田地,是治理坡耕地水土流失的有效措施,蓄水、保土、增产作用十分显著,梯田的通风透光条件较好,有利于作物生长和营养物质的积累,适合各种经济树木和果树的栽培生长,对发展多种经济十分有利,现有的山地梯田果园采收机械装置在需要对坡上的果树进行采摘时往往会出现重心不稳,工作平台不水平的情况,使采收人员采收效率降低。
技术实现要素:
3.本实用新型的目的在于针对现有技术的缺陷和不足,提供了一种山地梯田果园采收机械装置,设计合理,可以根据实际情况调节装置重心位置,人员站立平台水平角度可调。
4.为达到上述目的,本实用新型采用了下列技术方案:它包含箱体和带刹车万向轮,箱体底部固定有带刹车万向轮;它还包含齿条、一号电动伸缩杆、安装架、转杆、配重齿辊、蓄电池、倾角传感器、控制器、一号转轴、水平调节板、二号转轴、二号电动伸缩杆、三号电动伸缩杆、一号滑块、连接板、三号转轴、连接升降杆、四号转轴、人员站立板、二号滑块、五号转轴和限位板,箱体内腔底部固定有齿条,箱体的左侧壁上前后对应固定有一号电动伸缩杆,一号电动伸缩杆的输出端穿过箱体后,固定有安装架,前后对应的安装架之间固定有转杆,转杆上活动套设有配重齿辊,配重齿辊与齿条相互啮合,箱体上固定有蓄电池、倾角传感器和控制器,箱体上四个角均利用轴座活动设置有一号转轴,水平调节板底部四个角均利用轴座活动设置有二号转轴,二号电动伸缩杆的两端分别与一号转轴和二号转轴固定,前后对应的二号电动伸缩杆的内侧均固定有限位板,水平调节板底部固定有三号电动伸缩杆,水平调节板上的滑槽内均活动设置有一号滑块,一号滑块底部固定有连接板,连接板与三号电动伸缩杆的输出端固定,一号滑块上利用轴座活动设置有三号转轴,三号转轴上固定有连接升降杆,左右对应的连接升降杆利用四号转轴活动旋接,上下对应的连接升降杆利用四号转轴活动旋接,人员站立板上的滑槽内均活动设置有二号滑块,二号滑块底部利用轴座活动设置有五号转轴,最上方的连接升降杆与五号转轴固定,一号电动伸缩杆、倾角传感器、二号电动伸缩杆和三号电动伸缩杆均与蓄电池连接,一号电动伸缩杆、倾角传感器、二号电动伸缩杆和三号电动伸缩杆均与控制器电控连接。
5.优选地,人员站立板上固定有围栏。
6.优选地,箱体的左侧壁上利用连接杆固定有爬梯。
7.优选地,箱体的右侧壁上分别利用轴座活动设置有六号转轴和七号转轴,六号转轴上固定有四号电动伸缩杆,四号电动伸缩杆的侧壁上利用轴座活动设置有八号转轴,五号电动伸缩杆的两端别与七号转轴和八号转轴固定,四号电动伸缩杆的输出端上固定有固
定棘,四号电动伸缩杆和五号电动伸缩杆均与蓄电池连接,四号电动伸缩杆和五号电动伸缩杆均与控制器电控连接。
8.与现有技术相比,本实用新型的有益效果是:设计合理,可以根据实际情况调节装置重心位置,人员站立平台水平角度可调。
附图说明:
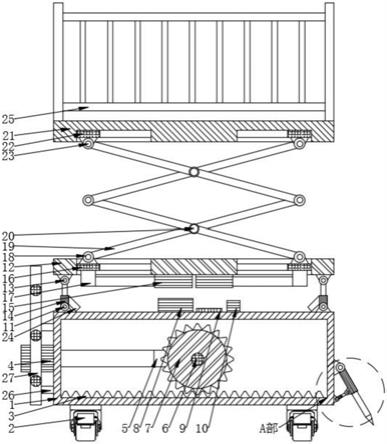
9.图1是本实用新型的结构示意图。
10.图2是本实用新型的内部结构示意图。
11.图3是图2中a部放大图。
12.附图标记说明:
13.箱体1、带刹车万向轮2、齿条3、一号电动伸缩杆4、安装架5、转杆6、配重齿辊7、蓄电池8、倾角传感器9、控制器10、一号转轴11、水平调节板12、二号转轴13、二号电动伸缩杆14、三号电动伸缩杆15、一号滑块16、连接板17、三号转轴18、连接升降杆19、四号转轴20、人员站立板21、二号滑块22、五号转轴23、限位板24、围栏25、连接杆26、爬梯27、六号转轴28、四号电动伸缩杆29、七号转轴30、八号转轴31、五号电动伸缩杆32、固定棘33。
具体实施方式:
14.下面将结合附图,对本实用新型中的技术方案进行清楚、完整地描述,以描述中的优选实施例只作为举例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
15.如图1-图3所示,本具体实施方式采用如下技术方案:它包含箱体1和带刹车万向轮2,箱体1底部铆接固定有带刹车万向轮2;它还包含齿条3、一号电动伸缩杆4、安装架5、转杆6、配重齿辊7、蓄电池8、倾角传感器9、控制器10、一号转轴11、水平调节板12、二号转轴13、二号电动伸缩杆14、三号电动伸缩杆15、一号滑块16、连接板17、三号转轴18、连接升降杆19、四号转轴20、人员站立板21、二号滑块22、五号转轴23和限位板24,箱体1内腔底部焊接固定有齿条3,箱体1的左侧壁上前后对应铆接固定有一号电动伸缩杆4,一号电动伸缩杆4的输出端穿过箱体1后,铆接固定有安装架5,前后对应的安装架5之间铆接固定有转杆6,转杆6上活动套设有配重齿辊7,配重齿辊7与齿条3相互啮合,箱体1上铆接固定有蓄电池8、倾角传感器9和控制器10,箱体1上四个角均利用轴座活动设置有一号转轴11,水平调节板12底部四个角均利用轴座活动设置有二号转轴13,二号电动伸缩杆14的两端分别与一号转轴11和二号转轴13铆接固定,前后对应的二号电动伸缩杆14的内侧均铆接固定有限位板24,水平调节板12底部铆接固定有三号电动伸缩杆15,水平调节板12上的滑槽内均活动设置有一号滑块16,一号滑块16底部铆接固定有连接板17,连接板17与三号电动伸缩杆15的输出端铆接固定,一号滑块16上利用轴座活动设置有三号转轴18,三号转轴18上铆接固定有连接升降杆19,左右对应的连接升降杆19利用四号转轴20活动旋接,上下对应的连接升降杆19利用四号转轴20活动旋接,人员站立板21上的滑槽内均活动设置有二号滑块22,二号滑块22底部利用轴座活动设置有五号转轴23,最上方的连接升降杆19与五号转轴23铆接固定,箱体1的左侧壁上利用连接杆26铆接固定有爬梯27,人员站立板21上铆接固定有围栏25,箱体1的右侧壁上分别利用轴座活动设置有六号转轴28和七号转轴30,六号转轴28上铆
接固定有四号电动伸缩杆29,四号电动伸缩杆29的侧壁上利用轴座活动设置有八号转轴31,五号电动伸缩杆32的两端别与七号转轴30和八号转轴31铆接固定,四号电动伸缩杆29的输出端上焊接固定有固定棘33,一号电动伸缩杆4、倾角传感器9、二号电动伸缩杆14、三号电动伸缩杆15、四号电动伸缩杆29和五号电动伸缩杆32均与蓄电池8连接,一号电动伸缩杆4、倾角传感器9、二号电动伸缩杆14、三号电动伸缩杆15、四号电动伸缩杆29和五号电动伸缩杆32均与控制器10电控连接。
16.本具体实施方式的工作原理:将装置移动至所需位置,刹住带刹车万向轮2,启动五号电动伸缩杆32带动四号电动伸缩杆29向外倾斜,启动四号电动伸缩杆29带动固定棘33伸长插入土中,使装置更稳定,倾角传感器9检测装置倾斜状态,传递信息至控制器10,控制器10启动一号电动伸缩杆4带动配重齿辊7移动,调节装置的重心位置,启动二号电动伸缩杆14伸缩,调节水平调节板12水平状态,随后采摘人员通过爬梯27爬到人员站立板21上,启动三号电动伸缩杆15带动一号滑块16向中间移动,从而带动人员站立板21上升,方便人员进行采摘。
17.采用上述结构后,本具体实施方式的有益效果如下:
18.1、带刹车万向轮2、四号电动伸缩杆29、五号电动伸缩杆32和固定棘33的配合,使装置固定更稳定;
19.2、一号电动伸缩杆4、安装架5、转杆6、配重齿辊7和倾角传感器9的配合,可以根据装置倾斜角度调节装置的重心;
20.3、倾角传感器9、水平调节板12和二号电动伸缩杆14的配合,可以调节人员站立板21至水平状态;
21.4、围栏25增加安全性;
22.5、爬梯27方便人员爬上人员站立板21。
23.对于本领域的技术人员来说,其可以对前述各实施例所记载的技术方案进行修改、部分技术特征的等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。