1.本发明涉及农业智能化领域,尤其涉及一种扫掠式的蓝莓果实智能化采摘与叶片分离设备。
背景技术:
2.目前在对蓝莓树丛中采摘蓝莓的过程中,很多都是需要人工手动采摘,人工手动采摘的方式存在很多的缺点,不仅会因采摘用力不均捏爆蓝莓果,还会很容易将蓝莓附带枝及其叶片一起摘下,导致后续的加工麻烦,且采摘过程使用人工存在耗费人力大的情况,且效率低下,对大面积蓝莓园采摘会产生很大的人力成本,目前的采摘方式较为原始,自动化程度低,智能化应用不强。
3.鉴于此,亟需研发一种能够对蓝莓采摘过程中提高速度和效率、提高自动化和智能化程度、采摘的蓝莓纯净度高的扫掠式的蓝莓果实智能化采摘与叶片分离设备。
技术实现要素:
4.为了克服目前在对蓝莓采摘过程中存在的速度慢效率低、自动化和智能化程度低、采摘的蓝莓附带叶片多的缺点,本发明的技术问题是:提供一种能够对蓝莓采摘过程中提高速度和效率、提高自动化和智能化程度、采摘的蓝莓纯净度高的扫掠式的蓝莓果实智能化采摘与叶片分离设备。
5.一种扫掠式的蓝莓果实智能化采摘与叶片分离设备,包括有:安装架,安装架一侧设有外接架,安装架近外接架一侧位置处设有分离箱,分离箱数量为两组;分离装置,分离装置设于分离箱之间,分离装置用于分离蓝莓与树叶;限位装置,限位装置设于分离箱远离外接架一侧位置之间,限位装置用于限制蓝莓的下落量;分流箱,分流箱设于限位装置远离外接架一侧位置处,分流箱为带有锥形块的结构;支撑架,支撑架设于安装架远离外接架一侧位置处,支撑架位置处设有第一电动滑轨,第一电动滑轨的移动件上设有移动架;扫掠装置,扫掠装置设于移动架上,扫掠装置用于采摘收集蓝莓;暂存装置,暂存装置设于扫掠装置近分流箱一侧位置处,暂存装置与分流箱配合,暂存装置用于暂时储存采摘的蓝莓;防泄装置,防泄装置设于扫掠装置上,防泄装置用于放置暂存装置处的蓝莓泄出。
6.优选的,分离装置包括有:双轴电机,双轴电机设于分离箱之间的位置处;风叶组,风叶组分别设于分离箱近双轴电机一侧位置处,风叶组分别伸入相邻的分离箱内,双轴电机输出轴分别与风叶组连接。
7.优选的,限位装置包括有:导流箱,导流箱设于分离箱远离外接架一侧位置之间,分流箱设于导流箱远离分离箱一侧位置处;第二电动滑轨,第二电动滑轨分别设于导流箱连接,且第二电动滑轨的移动件位于导流箱内的位置处均设有限位板。
8.优选的,扫掠装置包括有:第一转轴,第一转轴转动式设于移动架之间,第一转轴上设有旋转架;钢齿扫掠架,钢齿扫掠架设于旋转架远离第一转轴位置处,防泄装置设于钢齿扫掠架位置处,暂存装置设于钢齿扫掠架近防泄装置位置处,且暂存装置与钢齿扫掠架
互通;驱动电机,驱动电机设于移动架近第一转轴位置之间,驱动电机输出轴与第一转轴之间通过齿轮传动连接。
9.优选的,暂存装置包括有:暂存管,暂存管设于钢齿扫掠架近分流箱一侧位置处,暂存管与钢齿扫掠架互通;移动副,移动副设于暂存管近分流箱一侧位置处,移动副上设有第一弹性件,移动副的移动件近分流箱一侧位置处设有触发架,触发架与分流箱接触配合,触发架近暂存管一侧位置处设有挡板,挡板挡住暂存管。
10.优选的,防泄装置包括有:第二转轴,第二转轴固定设于钢齿扫掠架处;防泄板,防泄板转动式设于第二转轴上,防泄板与第二转轴近钢齿扫掠架的轴连接处设有第二弹性件;栏板,栏板设于钢齿扫掠架近第二转轴一侧位置处,且栏板挡住防泄板。
11.优选的,还包括有:光电开关,光电开关设于暂存管位置处。
12.优选的,还包括有控制箱,安装架一侧设有控制箱,控制箱包括有开关电源、dc-dc电源模块和微控制器mcu,dc-dc电源模块上通过线路连接有电源总开关,微控制器mcu和dc-dc电源模块之间通过电性连接,微控制器mcu上以电性连接的方式设有复位开关、启动开关、提升按键、下压按键和分离开关,微控制器mcu上连接有24c02电路,光电开关与微控制器mcu之间通过电性连接,第一电动滑轨、第二电动滑轨、驱动电机和双轴电机均与微控制器mcu通过外围电路连接。
13.本发明的有益效果为:1、本发明通过采用单次进给一定距离使扫掠装置进行平移和旋转的方式,能够使蓝莓树丛中的蓝莓被快速扯落,从而实现快速采摘,采用这样的方式不仅能高效的采摘蓝莓,还能够提高蓝莓采摘的自动化,解放人工。
14.2、本发明通过采用分离箱和分离装置对蓝莓和树叶进行分离的方式,能够使蓝莓的采摘过程中直接获得纯净的蓝莓,不会携带树叶,避免后续的进一步加工,简化了步骤,提高了效率,并且进一步的解放了人工。
附图说明
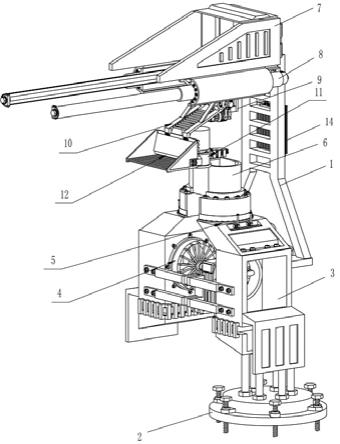
15.图1为本发明的第一种立体结构示意图。
16.图2为本发明的第二种立体结构示意图。
17.图3为本发明的第三种立体结构示意图。
18.图4为本发明的第四种立体结构示意图。
19.图5为本发明的第五种立体结构示意图。
20.图6为本发明分离箱部分的第一种立体结构示意图。
21.图7为本发明分离箱部分的第二种立体结构示意图。
22.图8为本发明分离箱部分的第一种局部立体结构示意图。
23.图9为本发明分离箱部分的第二种局部立体结构示意图。
24.图10为本发明分离装置部分的第一种立体结构示意图。
25.图11为本发明分离装置部分的第二种立体结构示意图。
26.图12为本发明限位装置部分的第一种立体结构示意图。
27.图13为本发明限位装置部分的第二种立体结构示意图。
28.图14为本发明限位装置部分的局部立体结构示意图。
29.图15为本发明支撑架部分的第一种立体结构示意图。
30.图16为本发明支撑架部分的第二种立体结构示意图。
31.图17为本发明支撑架部分的第三种立体结构示意图。
32.图18为本发明移动架部分的立体结构示意图。
33.图19为本发明扫掠装置部分的第一种立体结构示意图。
34.图20为本发明扫掠装置部分的第二种立体结构示意图。
35.图21为本发明扫掠装置部分的第一种局部立体结构示意图。
36.图22为本发明扫掠装置部分的第二种局部立体结构示意图。
37.图23为本发明暂存装置部分的第一种立体结构示意图。
38.图24为本发明暂存装置部分的第二种立体结构示意图。
39.图25为本发明暂存装置部分的第三种立体结构示意图。
40.图26为本发明暂存装置部分的局部立体结构示意图。
41.图27为本发明防泄装置部分的立体结构示意图。
42.图28为本发明防泄装置部分的局部立体结构示意图。
43.图29为本发明的电路原理图。
44.图30为本发明的电路框图。
45.以上附图中:1:安装架,2:外接架,3:分离箱,4:分离装置,5:限位装置,6:分流箱,7:支撑架,8:第一电动滑轨,9:移动架,10:扫掠装置,11:暂存装置,12:防泄装置,41:双轴电机,42:风叶组,51:导流箱,52:第二电动滑轨,53:限位板,101:第一转轴,102:旋转架,103:钢齿扫掠架,104:驱动电机,111:暂存管,112:移动副,113:第一弹性件,114:触发架,115:挡板,121:第二转轴,122:防泄板,123:第二弹性件,124:栏板,13:光电开关,14:控制箱。
具体实施方式
46.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
47.实施例1一种扫掠式的蓝莓果实智能化采摘与叶片分离设备,如图1-图8所示,包括有安装架1、外接架2、分离箱3、分离装置4、限位装置5、分流箱6、支撑架7、第一电动滑轨8、移动架9、扫掠装置10、暂存装置11和防泄装置12,安装架1下侧设有外接架2,安装架1下侧左方设有分离箱3,分离箱3数量为两组,分离箱3之间设有分离装置4,分离装置4用于分离蓝莓与树叶,分离箱3上侧设有限位装置5,限位装置5用于限制蓝莓的下落量,限位装置5上侧之间设有分流箱6,分流箱6为中部带有锥形块的结构,安装架1上侧设有支撑架7,支撑架7下侧设有第一电动滑轨8,第一电动滑轨8的移动件上设有移动架9,移动架9上设有扫掠装置10,扫掠装置10用于采摘收集蓝莓,扫掠装置10下侧右侧设有暂存装置11,暂存装置11与分流箱6配合,暂存装置11用于暂时储存采摘的蓝莓,扫掠装置10处设有防泄装置12,防泄装置12用于放置暂存装置11处的蓝莓泄出。
48.分离装置4包括有双轴电机41和风叶组42,分离箱3之间设有双轴电机41,分离箱3内侧均设有风叶组42,风叶组42分别伸入相邻的分离箱3内,双轴电机41输出轴分别与风叶组42连接。
49.限位装置5包括有导流箱51、第二电动滑轨52和限位板53,分离箱3上侧之间设有导流箱51,分流箱6设于导流箱51之上,导流箱51两侧均设有第二电动滑轨52,第二电动滑轨52位于导流箱51内的位置处均设有限位板53。
50.扫掠装置10包括有第一转轴101、旋转架102、钢齿扫掠架103和驱动电机104,移动架9之间转动式连接有第一转轴101,第一转轴101上固定设有旋转架102,旋转架102左侧下方之间设有钢齿扫掠架103,防泄装置12设于钢齿扫掠架103右侧边缘,暂存装置11设于钢齿扫掠架103右方位置处,且暂存装置11与钢齿扫掠架103右侧互通,移动架9右侧之间设有驱动电机104,驱动电机104输出轴与第一转轴101之间通过齿轮传动连接。
51.暂存装置11包括有暂存管111、移动副112、第一弹性件113、触发架114和挡板115,钢齿扫掠架103右侧设有暂存管111,暂存管111与钢齿扫掠架103右侧互通,暂存管111右侧下方设有移动副112,移动副112上设有第一弹性件113,第一弹性件113为直弹簧,移动副112的移动件下侧设有触发架114,触发架114与分流箱6接触配合,触发架114左侧设有挡板115,挡板115挡住暂存管111。
52.防泄装置12包括有第二转轴121、防泄板122、第二弹性件123和栏板124,钢齿扫掠架103右侧壁处固定设有第二转轴121,第二转轴121上转动式设有防泄板122,防泄板122与第二转轴121近钢齿扫掠架103的轴连接处设有第二弹性件123,第二弹性件123为扭力弹簧,钢齿扫掠架103内右侧壁处设有栏板124,栏板124挡住防泄板122。
53.当需要对蓝莓进行采摘时,可以使用该扫掠式的蓝莓果实智能化采摘与叶片分离设备,首先通过控制箱14上的电源总开关使该扫掠式的蓝莓果实智能化采摘与叶片分离设备上电,再通过观察测量该批次蓝莓的直径,以通过控制箱14上的提升按键和下压按键调节限位装置5的高度,以使限位装置5能够不会卡住蓝莓从分流箱6流入分离箱3,同时也使蓝莓单位时间内的下落量不会过高,避免分离装置4分离蓝莓与树叶不彻底;并且将外接架2安装于外界移动设备上,并推动其移动至蓝莓树丛一侧,并调整其高度,使扫掠装置10的扫掠部分低于蓝莓果实的整体高度;随后可以通过启动开关启动该扫掠式的蓝莓果实智能化采摘与叶片分离设备的工作,首先控制箱14将控制第一电动滑轨8运行,使第一电动滑轨8带动其移动件和移动架9向左移动,从而带动扫掠装置10向左移动,移动时间为三秒,距离为一个扫掠装置10的扫掠部分的距离,使扫掠装置10能够在向左移动的过程中铲入蓝莓树丛中,使蓝莓果实与树叶共同处于扫掠装置10的扫掠部分内部上方,而第一电动滑轨8向左运行三秒后,第一电动滑轨8将暂停运行,此时控制箱14将控制扫掠装置10运行,使扫掠装置10进行顺时针旋转,从而使扫掠装置10在旋转过程中将位于其内的蓝莓和部分树叶进行扯落,使蓝莓处于扫掠装置10的扫掠部分内,并且带有部分树叶,扫掠装置10此处将会受到控制箱14的控制而旋转九十度,使被扯落的蓝莓和部分树叶通过防泄装置12进入到暂存装置11中进行暂时储存,控制箱14在控制扫掠装置10顺时针旋转九十度时将在此位置停留三秒,以使蓝莓能够充分进入暂存装置11中,停留三秒结束后,控制箱14将控制扫掠装置10逆时针旋转九十度进行复位,随后控制箱14将继续控制第一电动滑轨8带动其移动件向左运行三秒,使扫掠装置10能够对下一个部分的蓝莓进行包围,并重复上述动作使蓝莓进入暂
存箱,在扫掠装置10逆时针旋转,防泄装置12将防止蓝莓从暂存装置11中泄出;外界也可以在一个扫掠装置10逆时针旋转时,通过控制箱14上的复位开关暂停第一电动滑轨8和扫掠装置10的运行,这样将会使扫掠装置10在该周期复位完成后,使第一电动滑轨8带动扫掠装置10向右移动进行复位,使扫掠装置10带动暂存装置11向右移动进行复位,在第一电动滑轨8带动扫掠装置10复位完成后,第一电动滑轨8将停止运行,此时暂存装置11也将进入与分流箱6的配合状态,从而使暂存装置11中暂存的蓝莓落入分流箱6中,经过分流箱6的锥形块结构分流入限位装置5处,经过限位装置5的限制运动,使蓝莓单位时间内少个数的分别落入分离箱3内,在此步骤开始时,可以通过分离开关启动分离装置4,使分离装置4对落入分离箱3中的蓝莓和部分树叶被分离,分离树叶后的蓝莓将通过分离箱3落下,此时可以对其进行收集;而在暂存装置11内的蓝莓果倾倒完成后,可以再次按下复位开关,此时控制箱14将控制第一电动滑轨8直接运行第一次按下复位开关时的脉冲数,即在第一次按下复位开关时第一电动滑轨8的运行次数,第一电动滑轨8每次运行一段距离都将被控制箱14记录为一个脉冲,而第二次按下复位开关后,控制箱14将控制第一电动滑轨8直接向左运行三秒每个脉冲的时间,即可以使第一电动滑轨8带动扫掠装置10重新归位至第一次按下复位开关时的位置,以便继续开始蓝莓的采摘;如此循环,可以使蓝莓树丛上的蓝莓被快速且智能的采摘;当扫掠装置10向左运行已经超过蓝莓树丛宽度时,可以再次按下复位开关,使扫掠装置10再次进行复位,并且移动该扫掠式的蓝莓果实智能化采摘与叶片分离设备,使其位于下一个位置处,按下启动开关重新开始新一轮的采摘,从而格式化控制箱14上的脉冲数记录;在分离装置4分离蓝莓与树叶完成时,可以通过分离开关关闭分离装置4,使其处于待机状态,直至下一波的蓝莓进入分离箱3。
54.当控制箱14控制分离装置4运行时,控制箱14将控制双轴电机41启动,双轴电机41将带动风叶组42进行旋转,从而对分离箱3内进行吹风,从而使被限制数量落入分离箱3内的蓝莓与树叶进行分离,树叶将被吹出分离箱3,而蓝莓果实将继续在分离箱3中落下,此时可以对蓝莓进行收集。
55.当控制箱14控制限位装置5运行时,控制箱14将控制第二电动滑轨52带动其移动件和限位板53共同上下移动,从而使限位板53与导流箱51之间的空隙得到改变,从而应对不同平均直径的蓝莓能够被限制数量的落入分离箱3,这样可以避免单位时间内大量蓝莓与树叶落入分离箱3,造成分离树叶不彻底的情况。
56.当控制箱14控制扫掠装置10运行时,控制箱14将控制驱动电机104运行,从而使驱动电机104带动第一转轴101进行正反转,从而带动旋转架102和钢齿扫掠架103正反转,且每次旋转九十度;在第一电动滑轨8带动钢齿扫掠架103向左移动时,钢齿扫掠架103将深入蓝莓树丛内,使蓝莓处于钢齿扫掠架103内部上方,当钢齿扫掠架103进行顺时针旋转时,钢齿扫掠架103将扯落蓝莓和部分树叶,并在顺时针旋转九十度过程中使蓝莓通过防泄装置12进入到暂存装置11中,而钢齿扫掠架103在逆时针旋转时,防泄装置12将防止暂存装置11中的蓝莓泄出。
57.当第一移动副112带动钢齿扫掠架103向右移动进行复位时,钢齿扫掠架103将带动暂存管111向右移动进行复位,当触发架114与分流箱6接触时,暂存管111继续向右移动将使挡板115停留在此位置,从而使暂存管111不再受到挡板115的阻挡,从而使暂存管111内的蓝莓进入到分流箱6内;而当暂存管111向左移动时,第一弹性件113将进行复位,从而
使挡板115进行复位,从而使挡板115能够重新挡住暂存管111。
58.当钢齿扫掠架103处于顺时针旋转状态时,钢齿扫掠架103上的蓝莓将冲过防泄板122进入到暂存管111中,且暂存管111中的蓝莓不会穿过防泄板122,此时防泄板122被栏板124挡住不会进行顺时针旋转。
59.实施例2在实施例1的基础上,如图9-图30所示,还包括有光电开关13,暂存管111内设有光电开关13。
60.当驱动电机104带动钢齿扫掠架103进行逆时针旋转复位后,控制箱14都将控制光电开关13启动一秒,若光电开关13检测到其之间具有物体时,光电开关13将通过控制箱14上的蜂鸣器进行警报,以指示暂存管111内的蓝莓数量达到光电开关13的位置处,需要及时的处理暂存管111内的蓝莓。
61.还包括有控制箱14,安装架1一侧设有控制箱14,控制箱14包括有开关电源、dc-dc电源模块和微控制器mcu,dc-dc电源模块上通过线路连接有电源总开关,微控制器mcu和dc-dc电源模块之间通过电性连接,微控制器mcu上以电性连接的方式设有复位开关、启动开关、提升按键、下压按键和分离开关,微控制器mcu上连接有24c02电路,光电开关13与微控制器mcu之间通过电性连接,第一电动滑轨8、第二电动滑轨52、驱动电机104和双轴电机41均与微控制器mcu通过外围电路连接。
62.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。