1.本实用新型涉及一种养鱼缸,尤其涉及一种智能养鱼缸,属于养鱼设备技术领域。
背景技术:
2.鱼缸在养鱼的过程中,会在鱼缸中投入食料,鱼没有吃完的食料都会沉入鱼缸底部,鱼的日常排泄物也会沉入鱼缸底部,日常就需要及时的清理鱼缸底部的残渣。这些残渣在水中变质会影响水质,让鱼生病或死亡,现有的鱼缸结构简单,在清理鱼缸底部残渣的过程中,需要先将鱼缸内的水放干净后才能清理鱼缸底部残渣,非常的不方便,费时费力,长期以来就缺乏一种在鱼缸内有水的情形下也可以自动清理鱼缸底部残渣的养鱼缸。
技术实现要素:
3.本实用新型的目的是针对现有的鱼缸结构简单,在清理鱼缸底部残渣的过程中,需要先将鱼缸内的水放干净后才能清理鱼缸底部残渣,非常的不方便,费时费力的缺陷和不足,现提供一种结构合理,在鱼缸内部有水的情形下,依然能够自动清理鱼缸底部残渣,达到了非常好的清理效果,省时省力,使用方便的一种智能养鱼缸。
4.为实现上述目的,本实用新型的技术解决方案是:一种智能养鱼缸,包括鱼缸,其特征在于:所述鱼缸的上端固定有水平横杆,水平横杆上开设有水平滑槽,水平滑槽上滑动安装有滑动座,滑动座上固定有连接杆,连接杆的下端固定连接电磁铁,电磁铁的输出端固定连接刮片杆,刮片杆伸入到鱼缸中,刮片杆的下端固定有刮片支架,刮片支架上安装有刮片,水平横杆上设置有齿条,电磁铁的外壳体上固定连接有步进电机,步进电机的输出端同轴固定有齿轮,齿轮与齿条相啮合,鱼缸内底面上的一侧固定有吸水管,吸水管与刮片相平行,吸水管上开设有长条扁口,鱼缸上开设有出水口,出水口一端与吸水管相连通,出水口另一端连通吸污泵。
5.进一步的,所述鱼缸上端的左右两侧壁对称固定有支撑杆,支撑杆上端固定支撑水平横杆。
6.进一步的,所述吸污泵安装固定在鱼缸的外侧壁上,吸污泵上的吸水口与鱼缸上的出水口相连通,吸污泵上的排水口与鱼缸外的空气相连通。
7.进一步的,所述鱼缸内底面上的一侧开设有凹槽,吸水管位于凹槽内。
8.进一步的,所述水平横杆上安装固定有控制器,控制器分别与步进电机、电磁铁和吸污泵电连接。
9.本实用新型的有益效果是:
10.1,本实用新型在鱼缸底部设置来回往复运动的刮片,通过电磁铁得电推动刮片接触鱼缸底部将鱼缸底部的残渣刮到鱼缸的一侧,电磁铁失电刮片离开鱼缸底部,刮片回到鱼缸另外一侧,这样鱼缸底部的残渣就会集中到鱼缸的一侧,方便了残渣的清理。
11.2,本实用新型结构合理,在鱼缸底部残渣聚集的一侧开始凹槽,残渣全部刮入凹槽中,凹槽中设置吸水管,吸水管上开设长条扁口,吸水管连通吸污泵,通过吸污泵就可以
将凹槽中的残渣排出鱼缸,鱼缸内有水依然能自动完成鱼缸底部残渣的清理,达到了非常好的清理效果,简单方便,省时省力。
附图说明
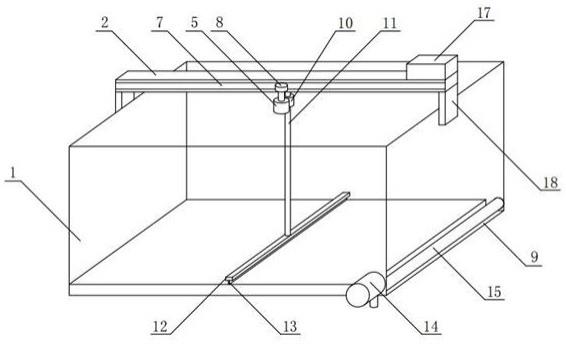
12.图1是本实用新型的结构示意图。
13.图2是本实用新型的剖视图。
14.图3是本实用新型吸水管的结构示意图。
15.图中:鱼缸1,水平横杆2,水平滑槽3,滑动座4,步进电机5,连接杆6,齿条7,齿轮8,凹槽9,电磁铁10,刮片杆11,刮片支架12,刮片13,吸污泵14,吸水管15,长条扁口16,控制器17,支撑杆18。
具体实施方式
16.以下结合附图说明和具体实施方式对本实用新型作进一步的详细描述。
17.参见图1至图3,本实用新型的一种智能养鱼缸,包括鱼缸1,其特征在于:所述鱼缸1的上端固定有水平横杆2,水平横杆2上开设有水平滑槽3,水平滑槽3上滑动安装有滑动座4,滑动座4上固定有连接杆6,连接杆6的下端固定连接电磁铁10,电磁铁10的输出端固定连接刮片杆11,刮片杆11伸入到鱼缸1中,刮片杆11的下端固定有刮片支架12,刮片支架12上安装有刮片13,水平横杆2上设置有齿条7,电磁铁10的外壳体上固定连接有步进电机5,步进电机5的输出端同轴固定有齿轮8,齿轮8与齿条7相啮合,鱼缸1内底面上的一侧固定有吸水管15,吸水管15与刮片13相平行,吸水管15上开设有长条扁口16,鱼缸1上开设有出水口,出水口一端与吸水管15相连通,出水口另一端连通吸污泵14。
18.所述鱼缸1上端的左右两侧壁对称固定有支撑杆18,支撑杆18上端固定支撑水平横杆2。
19.所述吸污泵14安装固定在鱼缸1的外侧壁上,吸污泵14上的吸水口与鱼缸1上的出水口相连通,吸污泵14上的排水口与鱼缸1外的空气相连通。
20.所述鱼缸1内底面上的一侧开设有凹槽9,吸水管15位于凹槽9内。
21.所述水平横杆2上安装固定有控制器17,控制器17分别与步进电机5、电磁铁10和吸污泵14电连接。
22.如附图所示,鱼缸1的左右两侧壁对称固定有支撑杆18,左右对称设置的支撑杆18之间固定支撑水平横杆2,水平横杆2高出鱼缸1上端一定距离,可以防止鱼缸1内的水侵湿安装在水平横杆2上的电气原件。水平横杆2的下端面开设有水平滑槽3,水平滑槽3上滑动安装有滑动座4,滑动座4上固定有连接杆6,连接杆6垂直向下设置。
23.连接杆6的下端固定连接有电磁铁10,电磁铁10的输出端固定连接刮片杆11,刮片杆11伸入到鱼缸1中,刮片杆11的下端固定有刮片支架12,刮片支架12上安装有刮片13。电磁铁10得电后,电磁铁10的输出端推动刮片杆11向下运动,让刮片13接触鱼缸1的底面;电磁铁10失电后,电磁铁10的输出端在电磁铁10内部弹簧的作用力下拉动刮片杆11向上提升,让刮片13离开鱼缸1的底面。
24.水平横杆2上设置有齿条7,电磁铁10的外壳体上固定连接有步进电机5,步进电机5的输出端同轴固定有齿轮8,齿轮8与齿条7相啮合。步进电机5带动电磁铁10从而带动滑动
座4在水平横杆2上滑动,滑动座4在水平横杆2上滑动带动刮片13左右运动。
25.鱼缸1内底面上的一侧开设有凹槽9,凹槽9与刮片13相平行,凹槽9内安装固定有吸水管15,吸水管15上开设有长条扁口16,鱼缸1上开设有出水口,出水口一端与吸水管15相连通,出水口另一端连通吸污泵14。吸污泵14安装固定在鱼缸1的外侧壁上,吸污泵14上的排水口与鱼缸1外的空气相连通。水平横杆2上安装固定有控制器17,控制器17分别与步进电机5、电磁铁10和吸污泵14电连接。
26.具体的运动过程为:控制器17首先控制电磁铁10得电,让刮片13接触鱼缸1的底面,进一步控制器17控制步进电机5启动正转,驱动刮片13将鱼缸1底部的残渣刮入凹槽9中,当刮片13运动到凹槽9时,步进电机5停止,进一步控制器17控制吸污泵14启动,吸污泵14通过吸水管15上的长条扁口16将凹槽9内的残渣抽出鱼缸1外,吸污泵14抽取一定时间后停止,进一步控制器17控制电磁铁10失电,让刮片13离开鱼缸1的底面,进一步控制器17控制步进电机5启动反转,驱动刮片13运动到远离凹槽9的一端,依次往复运动来清理鱼缸1底部的残渣。
27.以上内容是结合具体实施方式对本实用新型所做的进一步详细说明,不能认为本实用新型的具体实施只局限于这些说明,对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型发明构思的前提下,本实用新型还会有各种简单替换、改进和变化,所做出的各种简单替换、改进和变化,都应当视为属于本实用新型的保护范围。