1.本实用新型涉及禽类养殖设备技术领域,具体为一种禽舍自走式精准喂料机。
背景技术:
2.现有的禽舍自动化养殖喂料机,大部分采用采食槽上配机械平料装置,把料斗上的饲料,通过饲料自身重力下放到食槽上,并通过刮板刮平。喂料准确度较差,容易造成较大的饲料浪费、饲养效果参差不齐等情况;现在市面上也有通过绞龙旋转来将料斗上的饲料挤压到料槽上的技术,但是如果设计不当,也经常出现喂料机卡死,颗粒饲料被挤碎,饲料湿度大导致饲料落不到绞龙上等情况;另外市面上的禽舍喂料机基本是采用钢丝绳牵引式,电机放在一侧固定,通过钢丝绳拉着喂料机前行与后退,容易出现脱轨、钢丝绳断等故障。
技术实现要素:
3.本实用新型针对上述现有技术存在的问题,提供一种禽舍自走式精准喂料机。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:
5.一种禽舍自走式精准喂料机,包括笼架、下料机构、喂料机构以及行走机构,所述行走机构包括第一行行走组件和第二行走组件,所述第一行行走组件和第二行走组件均通过传动机构与第一驱动机构连接,并在所述第一驱动机构的驱动下沿着笼架上方设置的轨道行走,所述下料机构和行走机构连接,并随行走机构移动,将饲料投放在料槽中。
6.进一步地,所述第一行走组件和第二行走组件均包括行车轴,所述行车轴通过行车轮和轨道连接,且行车轴与传动机构连接。
7.进一步地,所述传动机构包括与第一驱动机构连接的主动轴,所述主动轴通过第一链轮组与第一从动轴和第二从动轴连接,所述第一从动轴和第二从动轴分别通过第二链轮组与第一行走组件的车轴和和第二行走组件的车轴连接。
8.进一步地,所述下料机构包括料斗,所述料斗上部设有防堵料机构,所述防堵料机构下方设有喂料机构,所述防堵机构将结块的饲料打碎,喂料机构将打碎后的饲料投放到料槽中。
9.进一步地,所述防堵料机构包括偏心转轴,所述偏心转轴上套设有震动板,所述偏心轴在第二驱动机构的驱动下转动,带动震动板转动,进而产生震动,将结块的饲料震碎。
10.进一步地,所述喂料机构包括喂料仓,所述喂料仓设置在料斗底部,且与料斗相互连通,所述喂料仓中设有出料螺旋轴,所述出料螺旋轴在第三驱动机构的驱动下转动,将位于喂料仓中的饲料从开设在喂料仓下方的出料口送出。
11.进一步地,所述出料口包括第一出料口和第二出料口,所述第一出料口和第二出料口分别开设在喂料仓的两端。
12.本实用新型的有益效果:
13.本实用新型提供的禽舍自走式精准喂料机的第一行行走组件和第二行走组件均
通过传动机构和驱动机构连接,即驱动机构同时带动两个行车轴转动,行车轴上的行车轮都作为动力轮,增加了摩擦力,减少了单轴转动所导致的打滑现象;第二驱动机构驱动偏心转轴带动震动板按一定的弧度旋转,从而通过震动来防止料斗内的饲料结块堵塞。
附图说明
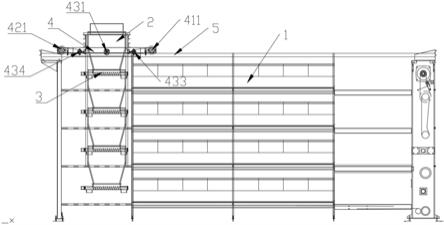
14.图1为本实用新型禽舍自走式精准喂料机的正视图;
15.图2为本实用新型禽舍自走式精准喂料机的侧视图;
16.图3为本实用新型行走机构的俯视图;
17.图4为本实用新型喂料机构的正视图;
18.图5为本实用新型喂料机构的侧视图。
19.图中:1-笼架,2-下料机构,21-料斗,3-喂料机构,31-喂料仓,32-出料螺旋轴,33-第三驱动机构,34-出料口,341-第一出料口,342-第二出料口,4-行走机构,41-第一行走组件,411-第一行车轴,42-第二行走组件,421-第二行车轴,423-固定杆,43-传动机构,431-主动轴,433-第一从动轴,434-第二从动轴,435-第一链轮组,436-第二链轮组,44-第一驱动机构,45-行车轮,5-轨道,6-防堵料机构,61-偏心转轴,62-震动板,63-第二驱动机构。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
21.在本技术的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
22.除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
23.请参考图1,为本实用新型提供的一种禽舍自走式精准喂料机,包括笼架1、下料机构2、喂料机构3以及行走机构4。
24.笼架1的侧面设有料槽和下料机构2,行走机构4设置在笼架1上方,下料机构2和行走机构4连接,随着行走机构4来回行走,将饲料投放到料槽中。
25.具体而言,行走机构4包括第一行行走组件41和第二行走组件42,第一行行走组件41和第二行走组件42均通过传动机构43与第一驱动机构44连接,并在第一驱动机构44的驱动下沿着笼架1上方设置的轨道5行走。
26.请参考图1-3,第一行走组件41包括第一行车轴411,第二行走组件42包括第二行车轴421,第一行车轴411和第二行车轴421相互平行,并通过固定杆423连接成一个整体,且二者均通过行车轮45和轨道5连接。
27.传动机构43包括主动轴431,主动轴431和第一驱动机构44连接,并在第一驱动机
构44的驱动下转动,主动轴431的两侧分别设有第一从动轴433和第二从动轴434,主动轴431通过第一链轮组435与第一从动轴433和第二从动轴434连接,第一从动轴433和第二从动轴434分别通过第二链轮组436与第一行车轴411和第二行车轴421连接。
28.使用时,第一驱动机构44为电机,第一驱动机构44驱动主动轴431转动,主动轴431通过第一链轮组435带动第一从动轴433和第二从动轴434转动,第一从动轴433和第二从动轴434通过第二链轮组436分别带动第一行车轴411和第二行车轴421转动,进而使新车轮45沿着轨道5行走。
29.请参考图4和图5,下料机构2包括料斗21,料斗21上部设有防堵料机构6,防堵料机构6下方设有喂料机构3,防堵机构6将结块的饲料打碎,喂料机构3将打碎后的饲料喂送到料槽中。
30.具体而言,防堵料机构6包括偏心转轴61,偏心转轴61上套设有震动板62,偏心轴61在第二驱动机构63的驱动下转动,带动震动板62转动,进而产生震动,将结块的饲料震碎。第二驱动机构63为电机。
31.喂料机构3包括喂料仓31,喂料仓31设置在料斗21底部,且与料斗21相互连通,喂料仓31中设有出料螺旋轴32,出料螺旋轴32在第三驱动机构33的驱动下转动,将位于喂料仓31中的饲料从开设在喂料仓31下方的出料口34送出。第三驱动机构33为电机。
32.进一步地,出料口包括第一出料口341和第二出料口342,第一出料口341和第二出料口342分别开设在喂料仓31的两端,饲料可以从喂料仓31的两端流出,避免因出料不及时导致出料螺旋轴32卡死。
33.工作原理:
34.使用时,第一驱动机构44驱动传动机构43沿着轨道5移动,使下料机构2沿着轨道5移动,同时,下料机构2中的第二驱动机构63和第三驱动机构73分别驱动防堵料机构6和喂料机构7进行饲料粉碎和喂料,将饲料均匀地投放在料槽中。
35.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。