1.本实用新型涉及一种辅助收割装置,特别涉及一种割走分离型芦苇收割机装置。
背景技术:
2.芦苇是优质的生物质资源,随着国家产业结构的调整,越来越多的新用途正在被开发。随之而来的,对芦苇的高效化收获技术的研究和推广也必须紧跟步伐。然而,现有芦苇收获装备的推广进展和技术支撑,还远远不能满足当前需求。目前,国内大部分的芦苇收获仍然在用着人工集中收获的方式,不仅作业环境艰苦、劳动强度大,效率也较为低下。
技术实现要素:
3.实用新型目的:本实用新型的目的在于提供一种割走分离型芦苇收割机装置,能够大范围地收割芦苇,同时控制收割芦苇的范围。
4.技术方案:一种割走分离型芦苇收割机装置,包括车体、车体推进装置、收割装置,收割装置与车体的头部之间设有收割平台伸缩杆,收割装置包括两根环绕有螺旋上升刀片的刀轴,收割装置还包括收割平台挡板、螺旋刀伸缩杆、轴承、转轴支座支持架、转轴支座、转轴电机支撑架、转轴电机、由转轴电机驱动的转轴;
5.所述的螺旋刀伸缩杆具有两根,每一根螺旋刀伸缩杆的底端与一个转轴固定相连,每一根螺旋刀伸缩杆的顶端通过一个轴承与一根刀轴的底部固定连接;所述的收割平台挡板为u字型挡板,且u字型的开口背对车体;两个转轴支座支持架分别固定在收割平台挡板的两个平行侧面的内侧并位于开口内,每一个转轴支座支持架上安装有两个间隔一定距离的转轴支座,转轴穿过并安装于两个转轴支座内;转轴电机安装在转轴电机支撑架上,两个转轴电机支撑架分别固定于收割平台挡板的两个平行侧面的内侧,且与处于同侧的转轴支座支持架呈垂直分布。
6.有益效果:本实用新型与现有技术相比具有优点:转动电机带动转轴进行转动,转轴上的螺旋刀伸缩杆也会随之左右摆动,进而控制芦苇收割的范围。
7.进一步的,收割装置还包括收割团刃装置、割台固定架、割刀电机、割刀导轨,所述的收割平台挡板的两个平行侧面的内侧且远离开口的一端均固定连接一个割台固定架,每个割台固定架均固定连接一个割刀电机,每个割刀电机分别与一个金属割刀导轨相嵌。通过控制收割团刃装置在割刀导轨位置,可以更加灵活的收割芦苇。
8.进一步的,螺旋刀伸缩杆顶端还设有凹槽,螺旋刀电机、螺旋刀联轴器固定在凹槽内,螺旋刀电机的输出轴通过螺旋刀联轴器连接轴承。螺旋刀电机带动刀轴进行转动,实现芦苇的剥叶工作。
9.进一步的,收割团刃装置包括轴、并排固定于轴上的若干绕轴360
°
的刀片。
10.进一步的,车体推进装置包括两根连接杆、推杆,两根连接杆的上端与推杆的两端固定连接,两根连接杆的下端与车体固定相连。
11.进一步的,车体推进装置还包括两个连接销、连接杆起升电机,连接杆分为上、中、
下三段,两个连接销分别置于连接杆的中下段之间、中上段之间,连接杆的下段内固定有连接杆起升电机。通过连接杆起升电机,能够实现调整段与段之间角度,方便操作者使用。
12.进一步的,连接杆的中段位置固定连接收割防护挡板,收割防护挡板为三块挡板固定连接而成,中间挡板位于两根连接杆上,两侧的挡板位于两根连接杆的外侧,中间挡板与两侧挡板之间均设有铰链。
13.进一步的,车体顶部装有信息收集处理与传输控制装置、导航系统装置、红外预警装置、电源箱、摄像头伸缩杆、摄像头、摄像头支撑座;摄像头伸缩杆上端与摄像头相连,下端与摄像头支撑座相连,摄像头支撑座固定在车体的顶部;所述的信息收集处理与传输控制装置用以控制电机的启停和伸缩杆的伸缩;红外预警装置用以车体遇到障碍物时预警。
14.进一步的,转轴电机有自锁功能,当不工作时或螺旋刀伸缩杆需要固定时,电机处于自锁状态。
15.进一步的,推杆的中间位置设有控制面板。
附图说明
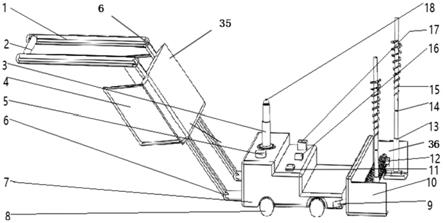
16.图1为本实用新型的结构示意图;
17.图2为本实用新型的俯视图;
18.图3为本实用新型的侧视图;
19.图4为本实用新型中转轴电机和螺旋刀伸缩杆的示意图;
20.图5为本实用新型中螺旋刀电机、螺旋刀联轴器与轴承的示意图;
21.图6为本实用新型的收割平台放大的示意图;
22.图7为本实用新型的收割平台放大主视图;
23.图8为本实用新型中铰链处局部放大示意图;
24.图9为本实用新型中车体底部局部放大示意图;
25.图10为本实用新型中连接杆起升电机的剖视图;
26.图11为本实用新型中控制面板局部放大图。
具体实施方式
27.下面结合附图对本实用新型的技术方案作进一步说明。
28.如图1至图11所示,本实用新型所述的一种割走分离型芦苇收割机装置包括车体7、车体推进装置35、收割装置36。
29.车体推进装置35包括两根连接杆1、推杆2、收割防护挡板4、两个连接销6、连接杆起升电机31、铰链34。连接杆1分为上、中、下三段,两根连接杆1的上段与推杆2的两端相连,下段与车体7的尾端通过焊接相连。推杆2的中央设有控制面板30,人们可以通过在控制面板30上的按钮,方便控制小车的前进速度,同时可以通过在推杆2上的施力改变小车的前进方向。收割防护挡板4内焊接于两根连接杆1的中段位置,收割防护挡板4是由三块挡板拼接而成,中间的挡板固定在两根连接杆1上,两侧的挡板分别位于两根连接杆1的外侧,中间挡板与两侧挡板之间均设有铰链34,两侧的挡板可以有角度地锁死固定,当操作人员进行工作时,可以防止芦苇上的叶片因高速切割而刮伤人体,减少对人体的伤害。两根连接杆1的上段与中段之间、下段与中段之间都设有连接销6,连接杆1的下段还设有连接杆起升电机
31,通过连接杆起升电机31给连接杆1的中上段、中下段调整位置角度提供动力,方便了操作者使用。
30.收割装置36包括收割平台挡板10、收割团刃装置12、螺旋刀伸缩杆13、轴承14、刀轴15、转轴支座支持架19、割台固定架21、转轴支座22、割刀电机24、割刀导轨25、转轴电机支撑架26、转轴电机27、转轴电机联轴器28、转轴29、螺旋刀联轴器32、螺旋刀电机33。收割平台挡板10由三块挡板拼接而成,呈u字型且u字型的开口背对车体,中间一块挡板的外侧与收割平台伸缩杆9的一端相连,收割平台伸缩杆9的另一端与车体7的头部固定连接,两侧的挡板互相平行。
31.两侧挡板的内侧且靠近中间挡板的一端均通过焊接固定连接一个割台固定架21,每个割台固定架21均通过焊接固定连接一个割刀电机24,每个割刀电机24分别与一个割刀导轨25相嵌。收割团刃装置12是由15个绕轴360
°
的8块刀片组合并排固定在轴37上而成,收割团刃装置12卡在两个割刀导轨25之间,割刀电机24为收割团刃装置12提供动力,使其能够两个割刀导轨25中运动。割刀导轨25外部的材质为塑料,起到保护的作用,内部的轨道材质为全金属,能使收割团刃装置12在导轨内运动时通电接触良好。
32.两侧挡板的内侧且远离中间挡板的一端分别固定一个转轴支座支持架19,转轴支座支持架19的外形呈长方形,两个同心转轴支座22间隔10cm焊接在每一个转轴支座支持架19上,转轴29安装在两个同心转轴支座22内。两根螺旋刀伸缩杆13的底端分别与一个转轴29焊接固定,两根螺旋刀伸缩杆13的顶端通过轴承14与刀轴15相连;轴承14的内圈通过焊接固定在刀轴15底部向下延伸的光轴上,外圈通过焊接固定在螺旋刀伸缩杆13的顶端上,两根刀轴15上环绕有呈螺旋上升状的刀片。两根螺旋刀伸缩杆13的顶部均设有凹槽,每个凹槽内通过螺栓固定一个螺旋刀电机33,每一个螺旋刀电机33的输出轴通过一个螺旋刀联轴器32连接相应的轴承14。每一个转轴29的一端通过一个转轴电机联轴器28与一个转轴电机27的输出轴相连,转轴电机27通过螺栓连接固定在转轴电机支撑架26上,两个转轴电机支撑架26分别焊接于收割平台挡板10的两个平行的侧面的内侧,且与处于同侧的转轴支座支持架19呈垂直布置。其中,转轴电机27的转动速度为20转/分钟,转轴电机27转动带动螺旋刀伸缩杆13左右摆动,转轴电机27正转一次,螺旋刀伸缩杆13顺时针旋转10
°
,反转一次,伸缩杆逆时针旋转3
°
。螺旋刀电机33的转动速度为60转/分钟,螺旋刀电机33带动刀轴15转动从而实现芦苇的剥叶工作。此外,螺旋刀伸缩杆13的伸缩平面与收缩团刃装置12切割平面有高度差,避免两个工作平面发生碰撞现象。
33.车体7的顶部装有通过摄像头伸缩杆3、信息收集处理与传输控制装置5、北斗导航系统装置11、红外预警装置16、电源箱17、摄像头18、摄像头支撑座20,车体7的底部装有四个车轮8,四个车轮8是通过两根金属车轴23控制车体运动的平衡。摄像头伸缩杆3顶端与摄像头18相连,底端与摄像头支撑座20通过焊接相连,摄像头支撑座20焊接在车体7的顶部。当小车在行进过程中,摄像头支撑座20可以有效缓解行进时摄像头18的振动颠簸,以获得清晰稳定的画质。信息收集处理与传输控制装置5、北斗导航系统装置11、红外预警装置16、电源箱17均通过胶接形式固定在车体7上,其中,信息收集处理与传输控制装置5与计算机通过无线形式连接,并通过控制线与摄像头伸缩杆3、连接杆起升电机31、收割平台伸缩杆9、割刀电机24、转轴电机27、螺旋刀电机33、螺旋刀伸缩杆13、收割团刃装置12、北斗导航系统装置11相连,主要来控制电机的启停和伸缩杆的伸缩。信息收集处理与传输控制装置5还
通过控制线与红外预警装置16相连,当小车处于自动行驶模式时,若遇到障碍物,远程计算机控制系统可以及时收到红外预警装置16的反馈,及时地停住小车。电源箱17是为整个装置的供电。
34.此外,所有电机均有自锁功能,当不工作时或伸缩杆需要固定时,电机处于自锁状态。例如:当螺旋刀伸缩杆13与收割平台挡板10或者两个螺旋刀伸缩杆13即将相撞时,转轴电机27将锁死,螺旋刀伸缩杆13也将停止旋转。
35.使用时,接通电源,按下控制面板30上相应的按钮,通过调整摄像头伸缩杆3的伸缩、收割平台伸缩杆9的伸缩、螺旋刀伸缩杆13的升降、收割团刃装置12在割刀导轨25上的位置以及转轴电机27和螺旋刀电机33的转动,使得本装置各部件符合实际收割的需求;调整完毕后,操作人员推动本装置对芦苇进行收割。