1.本实用新型属于农业机械技术领域,具体涉及一种基于双模导航的勺轮式电驱动玉米精密排种器。
背景技术:
2.玉米作为我国第一大粮食作物,玉米产量增加与否对提高国民收入以及减轻国家粮食压力有着直接的影响,在养殖业、加工业大量的需求拉动下,我国的玉米种植面积在迅速扩大。我国常用的勺轮式排种器具有结构简单、使用广泛和成本低的特点,勺轮式玉米排种器利用地轮为排种器的工作提供动力,即作业中通过地轮转动时与地面产生的摩擦力来带动排种轴转动。但是复杂的田间作业工况和故障现象会导致漏播发生,降低播种质量,不能够满足大面积种植作物的需求,也无法满足现代农业精确播种的需要。其主要原因一方面是拖拉机牵引播种机前行,地轮通过链传动带动排种器的排种轴转动进行排种,当地面土壤松软或者高低不平时,地轮容易出现滑移现象导致漏播的发生,从而影响播种质量;另一方面是排种器的转速与机组前进速度配合保证不了确定的玉米播种株距,勺轮的旋转速度极大地影响了播种质量,速度过高使充种性能和清种性能变差,限制了采用该排种器田间作业速度的进一步提高。因此,针对玉米精密排种器作业过程中出现的问题,设计一种基于双模导航的勺轮式电驱动玉米精密排种器,对于促进玉米精量播种技术的智能化和高效发展具有重要意义。
技术实现要素:
3.本实用新型的目的在于针对现有的机械式玉米精密排种器器播种精密性的不足,设计一种基于双模导航模块下既能在高速作业下稳定工作,又能实现精密播种的勺轮式电驱动玉米精密排种器,提高播种合格率。
4.本实用新型的一种基于双模导航的勺轮式电驱动玉米精密排种器由排种器组件a、驱动组件b、控制组件c和主轴1组成,其中驱动组件b和排种器组件a左右排列,驱动组件b的减速器壳体4右端固接于排种器组件a的导种轮半壳体7左面;主轴1左端与驱动组件b中伞齿轮ⅱ18的中心固接,主轴1中部与排种器组件a中导种轮半壳体7的中心活动连接,主轴1右端与排种器组件a中导种轮13的中心固接;驱动组件b的闭环步进电机3由控制组件c的闭环步进电机驱动器6控制;控制组件c的显示屏2固接于驱动组件b中减速器壳体4的左面;控制组件c的stm32单片机控制器5固接于驱动组件b中减速器壳体4的上面;控制组件c的闭环步进电机驱动器6固接于排种器组件a中导种轮半壳体7的左面上部。
5.所述的排种器组件a由导种轮半壳体7、透明圆形壳体8、进种管10、固定支架11、螺栓组12、导种轮13、隔板14、勺轮15、插销21和螺钉组22组成,其中导种轮13、隔板14和勺轮15自左至右顺序排列,导种轮13的中心与主轴1右端固接,从而使得导种轮13可随主轴1的转动而转动;隔板14经插销21与导种轮半壳体7上的隔板调节孔20固接,通过连接不同调节孔可以实现隔板开口角度的调节,角度调节范围是5-30
°
;勺轮15经螺钉组22的3个螺钉与
导种轮13固接,实现导种轮13与勺轮15的同步转动;导种轮半壳体7设置在固定支架11上,导种轮半壳体7和透明圆形壳体8经螺栓组12的4个螺栓固接,导种轮半壳体7、勺轮15和透明圆形壳体8共同构成种子室16;进种管10固接于透明圆形壳体8右侧前部,进种管10的上端为进种口9;进种管10的下端与种子室16连通,导种轮半壳体7和透明圆形壳体8的下端朝后设有矩形出种口17。
6.所述的驱动组件b由闭环步进电机3、减速器壳体4、伞齿轮ⅱ18和伞齿轮ⅰ19组成,其中伞齿轮ⅰ19和伞齿轮ⅱ18位于减速器壳体4内,闭环步进电机3位于减速器壳体4前方,闭环步进电机3中输出轴的后端穿过减速器壳体4的前板中心孔,与伞齿轮ⅰ19中心固接;伞齿轮ⅰ19与伞齿轮ⅱ18垂直啮合。行成了一组减速机构;伞齿轮ⅱ18的中心与主轴1左端固接,从而实现闭环步进电机3带动导种轮13的转动。
7.所述控制组件a由显示屏2、stm32单片机控制器5、闭环步进电机驱动器6和北斗+gps双模导航模块25组成,北斗+gps双模导航模块25固接在stm32单片机控制器5上。
8.所述导种轮13中设有导种凹槽组23的16
‑‑
20个导种凹槽,勺轮15中设有舀勺组24的16
‑‑
20个舀勺,导种凹槽组23的导种凹槽与舀勺组24的舀勺位置一一对应,且在导种轮13的圆周上均布。
9.所述的闭环步进电机3底部自带高精度旋转编码器,可以实时采集闭环步进电机3的实际转速。
10.本实用新型的作业过程如下:
11.本实用新型中排种器组件a、驱动组件b、控制组件c和主轴1均安装于基于双模导航的勺轮式电驱动玉米精密排种器上,控制组件c中的北斗+gps双模导航定位模块25固接在stm32单片机控制器5上,通过运算与每一卫星的伪相距,选用相距交会法算出经度、纬度、高度和时间修正量这4个参数,并将数据传输给stm32单片机控制器5。
12.stm32单片机控制器5通过接收北斗+gps双模导航模块25传输进来的位置信息后,进行排种器位置变化的数据读取与计算,控制器进行相应的程序处理后,得出排种器的理论转速n1,并发出相应的脉冲信号给闭环步进电机驱动器6,闭环步进电机驱动器6通过传输来的脉冲信号,控制闭环步进电机3的转动,闭环步进电机3输出轴后端的伞齿轮ⅰ19与主轴1左端的伞齿轮ⅱ18垂直啮合,从而带动导种轮13的转动。
13.排种器组件a内的勺轮15在与导种轮13同步转动的过程中,将种子室16内的种子舀到舀勺组24中,保证每个舀勺中均有一到两颗玉米种子,舀勺组24内的种子随着转动到达一定高度时,由于玉米种子自身重力的作用,通过隔板14的开口落入到导种轮13的导种凹槽组23内,玉米种子随着导种轮13的转动经过矩形出种口16落入地面,完成整个播种过程。
14.闭环步进电机3的底端自带高精度旋转编码器可以实时测得步进电机的实际转速n2,并将步进电机的转速情况回传到stm32单片机控制器5中,stm32单片机控制器5通过控制器内的程序对传输来的排种器的实际转速n2与理论转速n1进行分析比较,再给出合理的调节信号,把该信号传递给闭环步进电机驱动器6,由闭环步进电机驱动器6驱动闭环步进电机3进行相应的转动,保证排种器播种速度与排种器行驶的速度一致,保持排种器播种的稳定性。
15.本实用新型的有益效果在于:
16.1.由于排种器驱动力是闭环步进电机带动,所以避免了出于地轮打滑或者高速状况下所造成的漏播现象,做到排种速度与排种器行驶速度一致,使株距均匀。
17.2.采用了电驱动的模式,减少了传统机械传动模式的各种传动部件的存在,减轻了排种器的整体质量,减轻了对土壤的镇压力,减少了对土壤的损伤。
18.3.采用了北斗+gps双模导航定位模块,同时收发信号,实现全国实时交叉精准定位,比一般单模定位系统精准、快速,可以既快速又准确的采集到排种器的行进速度。
19.4.采用了闭环步进电机,其底端自带高精度旋转编码器,可以采集步进电机转速的实际数值,传输回stm 32单片机控制器与理论数值进行比较,通过pid算法进行实时调节,使得玉米播种更为精准。
附图说明
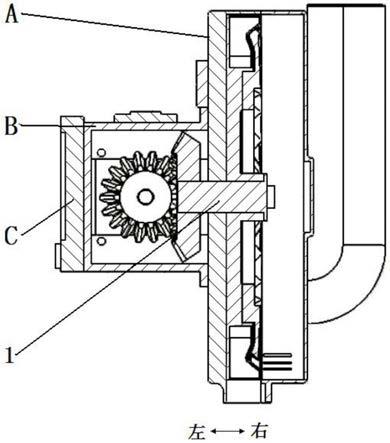
20.图1为基于双模导航的勺轮式电驱动玉米精密排种器的剖视图;
21.图2为基于双模导航的勺轮式电驱动玉米精密排种器的第一立体图;
22.图3为基于双模导航的勺轮式电驱动玉米精密排种器的第二立体图;
23.图4为基于双模导航的勺轮式电驱动玉米精密排种器的序号标记剖视图;
24.图5为部分排种器组件a的侧视图;
25.图6为图5中a所指的放大图;
26.图7为驱动组件b的剖视图;
27.图8为stm32单片机控制器5的俯视图;
28.图9为基于双模导航的勺轮式电驱动玉米精密排种器的部件连接示意图;
29.图10为控制系统的流程图;
30.其中:a.排种器组件b.驱动组件c.控制组件1.主轴2.显示屏3.闭环步进电机4.减速器壳体5.stm32单片机控制器6.闭环步进电机驱动器7.导种轮半壳体8.透明圆形壳体9.进种口10.进种管11.固定支架12.螺栓组13.导种轮14.隔板15.勺轮16.种子室17.矩形出种口18.伞齿轮ⅱ19.伞齿轮ⅰ20.隔板调节孔21.插销22.螺钉组23.导种凹槽组24.舀勺组25.北斗+gps双模导航模块。
具体实施方式
31.下面结合附图描述本实用新型。
32.如图1-图4所示,本实用新型的一种基于双模导航的勺轮式电驱动玉米精密排种器由排种器组件a、驱动组件b、控制组件c和主轴1组成,其中驱动组件b和排种器组件a左右排列,驱动组件b的减速器壳体4右端固接于排种器组件a的导种轮半壳体7左面;主轴1左端与驱动组件b中伞齿轮ⅱ18的中心固接,主轴1中部与排种器组件a中导种轮半壳体7的中心活动连接,主轴1右端与排种器组件a中导种轮13的中心固接;驱动组件b的闭环步进电机3由控制组件c的闭环步进电机驱动器6控制;控制组件c的显示屏2固接于驱动组件b中减速器壳体4的左面;控制组件c的stm32单片机控制器5固接于驱动组件b中减速器壳体4的上面;控制组件c的闭环步进电机驱动器6固接于排种器组件a中导种轮半壳体7的左面上部。
33.如图2-图6所示,所述的排种器组件a由导种轮半壳体7、透明圆形壳体8、进种管10、固定支架11、螺栓组12、导种轮13、隔板14、勺轮15、插销21和螺钉组22组成,其中导种轮
13、隔板14和勺轮15自左至右顺序排列,导种轮13的中心与主轴1的右端固接,从而使得导种轮13可随主轴1的转动而转动;隔板14设置在导种轮13与勺轮15之间,隔板14经插销21与导种轮半壳体7上的隔板调节孔20固接,通过连接不同调节孔的位置实现隔板开口角度的调节,角度可调范围是5-30
°
;勺轮15经螺钉组22的3个螺钉与导种轮13固接,实现导种轮13与勺轮15的同步转动;导种轮13中导种凹槽组23个数选择的是18个,勺轮15中舀勺组24个数选择的也为18个,导种凹槽组23的导种凹槽与舀勺组24的舀勺位置一一对应,且在导种轮13的圆周上均布;导种轮半壳体7设置在固定支架11上,导种轮半壳体7和透明圆形壳体8经螺栓组12的4个螺栓固接,导种轮半壳体7、勺轮15和透明圆形壳体8共同构成种子室16,透过透明圆形壳体8可在外面实时观察种子室16内的种子情况;进种管10固接于透明圆形壳体8右侧前部,进种管10的上端为进种口9;进种管10的下端与种子室16连通,导种轮半壳体7和透明圆形壳体8的下端朝后设有矩形出种口17。
34.如图2、图3、图4和图7所示,所述的驱动组件b由闭环步进电机3、减速器壳体4、伞齿轮ⅱ18和伞齿轮ⅰ19组成,伞齿轮ⅰ19和伞齿轮ⅱ18位于减速器壳体4内,闭环步进电机3位于减速器壳体4前方,闭环步进电机3中输出轴的后端穿过减速器壳体4的前板中心孔,与伞齿轮ⅰ19中心固接;伞齿轮ⅰ19与伞齿轮ⅱ18垂直啮合,两个齿轮行成了一组减速机构;伞齿轮ⅱ18的中心与主轴1的左端固接,从而可以实现闭环步进电机3带动导种轮13转动。
35.如图2、图3、图4和图8所示,所述控制组件c由显示屏2、stm32单片机控制器5、闭环步进电机驱动器6和北斗+gps双模导航模块25组成,显示屏2固接于驱动组件b中减速器壳体4的左面,stm32单片机控制器5固接于驱动组件b中减速器壳体4的上面,闭环步进电机驱动器6固接于排种器组件a中导种轮半壳体7的左面上部;北斗+gps双模导航模块25固接在stm32单片机控制器5上。
36.如图9和图10所示,基于双模导航的勺轮式电驱动玉米精密排种器在高速播种作业时,北斗+gps双模导航模块25可以既快速又准确的采集排种器位置变化的情况,通过运算与每一卫星的伪相距,选用相距交会法算出经度、纬度、高度和时间修正量这4个参数,把采集到的信息传输给stm32单片机控制器5,通过之前已经写入的程序进行处理分析后,可以得出闭环步进电机3的理论转速n1,即通过采集到的排种器的位置变化信息来得到期望的排种器的速度,驱动排种器的进行相应的转动;闭环步进电机3的底端自带高精度旋转编码器可以实时测得步进电机的转速,即得到的是实际的排种器速度n2,并将步进电机的转速情况回传到stm32单片机控制器5中,通过程序内的pid算法进行分析比较,再给出合理的调节信号,把该信号传递给闭环步进电机驱动器6,由闭环步进电机驱动器6驱动闭环步进电机3进行相应的转动,闭环步进电机3输出轴后端的伞齿轮ⅰ19与主轴1左端的伞齿轮ⅱ18垂直啮合,从而带动导种轮13与勺轮15的同步转动。