1.本实用新型涉及全景环带成像技术领域,具体为一种全景光学环带物镜。
背景技术:
2.随着科学技术的不断发展,大视场360
°
的全景观测已经成为了一种发展趋势,其在电影摄像机、医疗器械、监视系统、机器人系统、飞行指挥与控制系统、运动摄像机、无人驾驶汽车等领域都被得到广泛应用。
3.全景观测通常采用全景环带成像技术,该技术是一种新的成像方式,其可以将围绕光学系统光轴360
°
范围的圆柱视场投影到二维平面上的一个环形区域内,从光学原理上实现360
°
全景凝视成像。但其在成像方面具有较大的缺陷,主要体现为图像分辨率较低、局部细节成像较差。
4.为此,申请号为cn201911166009.9的专利公开了一种8k高分辨全景环带光学镜头,包括依次同轴安装的全景环带透镜头部单元、后继透镜组,全景环带透镜头部单元包括依次设置的全景环形透镜pal1、pal2,后继透镜组包括依次设置的透镜g1至g8,但是该镜头中透镜的数量多达10片,不利于镜头的最小化发展。
技术实现要素:
5.本实用新型针对现有技术存在的问题,提出了一种全景光学环带物镜,在保证分辨率的前提下,通过优化透镜配置的方式减少了透镜的数量,从而达到了精简结构的目的。
6.本实用新型解决其技术问题所采用的技术方案是:一种全景光学环带物镜,包括从物侧到像侧沿光轴方向依次设置的全景环形透镜一、全景环形透镜二、第一透镜、第二透镜、第三透镜、第四透镜、第五透镜和第六透镜;
7.所述第一透镜的物侧面为凹面、像侧面为凸面,其屈光度为负;所述第二透镜的物侧面为凸面、像侧面为凹面,其屈光度为负;所述第三透镜的物侧面为凸面、像侧面为凸面,其屈光度为正;所述第四透镜的物侧面为凸面、像侧面为凸面,其屈光度为正;所述第五透镜的物侧面为凸面、像侧面为凸面,其屈光度为正;所述第六透镜的物侧面为凹面、像侧面为凹面,其屈光度为负;
8.且所述第二透镜的像侧面与所述第三透镜的物侧面胶合连接。
9.作为优选,所述第一透镜为负焦距塑胶非球面透镜。
10.作为优选,所述第二透镜为负焦距玻璃透镜。
11.作为优选,所述第三透镜为正焦距玻璃透镜。
12.作为优选,所述第四透镜为正焦距玻璃球面透镜。
13.作为优选,所述第五透镜为正焦距塑胶非球面透镜。
14.作为优选,所述第六透镜为负焦距塑胶非球面透镜。
15.作为优选,所述全景环形透镜一的物侧面设有外凸的第一环形折射部和内凹的第一环形反射部,所述全景环形透镜二的像侧面设有外凸的第二环形反射部和外凸的第一圆
形折射部,所述全景环形透镜一的像侧面与所述全景环形透镜二的物侧面胶合连接,且所述全景环形透镜一与所述全景环形透镜二的胶合面朝向像侧面弯曲设置。
16.作为优选,所述全景光学环带物镜还包括设置在所述第六透镜与探测器焦面之间的滤光片。
17.作为优选,所述全景光学环带物镜还包括设置在所述全景环形透镜二与所述第一透镜的孔径光阑。
18.有益效果
19.本实用新型对透镜的类型和排布方式进行了优化,使得在只需采用8片透镜的情况下也能够保证物镜的分辨率,进而使得物镜的结构更加精简。
附图说明
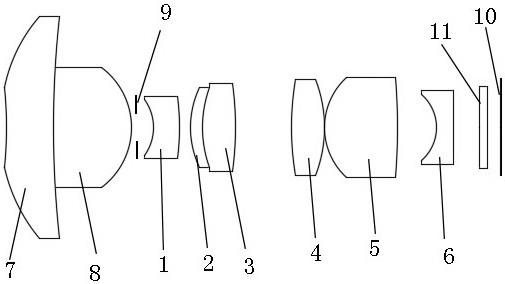
20.图1为本实用新型全景光学环带物镜的结构示意图;
21.图2为本实用新型全景环形透镜一和全景环形透镜二的结构示意图。
具体实施方式
22.下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
23.实施例:如图1和图2所示,一种全景光学环带物镜,包括从物侧到像侧沿光轴方向依次设置的全景环形透镜一7、全景环形透镜二8、第一透镜1、第二透镜2、第三透镜3、第四透镜4、第五透镜5和第六透镜6。
24.所述全景环形透镜一7的物侧面设有外凸的第一环形折射部7-1和内凹的第一环形反射部7-2,所述全景环形透镜二8的像侧面设有外凸的第二环形反射部8-1和外凸的第一圆形折射部8-2,所述全景环形透镜一7的像侧面与所述全景环形透镜二8的物侧面胶合连接,且所述全景环形透镜一7与所述全景环形透镜二8的胶合面朝向像侧面弯曲设置。
25.所述第一透镜1为负焦距塑胶非球面透镜,且所述第一透镜1的物侧面为凹面、像侧面为凸面。所述第二透镜2为负焦距玻璃透镜,且所述第二透镜2 的物侧面为凸面。所述第三透镜3为正焦距玻璃透镜,且所述第三透镜3的像侧面为凸面。所述第二透镜2与第三透镜3胶合连接,且所述第二透镜2与第三透镜3的胶合面朝向物侧面弯曲设置。正透镜产生负色差,负透镜产生正色差,所以采用正负透镜胶合方式对系统色差起到校正负效果。所述第四透镜4为正焦距玻璃球面透镜,且所述第四透镜4为双凸透镜。所述第五透镜5为正焦距塑胶非球面透镜,且所述第五透镜5为双凸透镜。所述第六透镜6为负焦距塑胶非球面透镜,且所述第六透镜6的物侧面为凹面、像侧面为凹面。
26.另外,所述第一透镜1、第二透镜2的焦距分别为f1、f2,需要满足:1.73《f2/f1《1.80;所述第四透镜4、第五透镜5、第六透镜6的焦距分别为f4、f5、f6,需要满足:-3.46《f5/f6《-3.1,-1.36《f4/f2《-1.27。具体的,f1可以是-7.7,f2可以是-13.3,f4可以是17.98,f5可以是7.8958,f6可以是-2.288。
27.第一透镜1的物侧面的曲率半径可以是-3.090毫米,第一透镜1的像侧面的曲率半径可以是-14.280毫米。第二透镜2的物侧面的曲率半径可以是4.910毫米,第二透镜2的像侧面的曲率半径可以是3.250毫米。第三透镜3的物侧面的曲率半径可以是3.250毫米,第三透镜3的像侧面的曲率半径可以是-9.900毫米。第四透镜4的物侧面的曲率半径可以是
22.100毫米,第四透镜4的像侧面的曲率半径可以是-15.800毫米。第五透镜5的物侧面的曲率半径可以是5.100毫米,第五透镜5的像侧面的曲率半径可以是-17.2500毫米。第六透镜6的物侧面的曲率半径可以是-1.550毫米,第六透镜6的像侧面的曲率半径可以是41.051毫米。
28.外部光线首先从全景环形透镜一7的第一环形折射部7-1进入全景环形透镜一7,然后通过全景环形透镜一7与全景环形透镜二8的胶合面折射之后进入全景环形透镜二8,接着光线在全景环形透镜二8的第二环形反射部8-1反射后返回全景环形透镜一7,最后光线通过全景环形透镜一7的第一环形反射部7-2反射后进入全景环形透镜二8并经全景环形透镜二8的第一圆形折射部8-2透射后依次通过第一透镜1、第二透镜2、第三透镜3、第四透镜4、第五透镜5和第六透镜6,最终到达探测器焦面10。
29.本实用新型对透镜的配置方式(包括类型和排布方式)进行了优化,使得在只需采用8片透镜的情况下也能够保证物镜的分辨率,相比现有技术减少了2片透镜,因此使得物镜的结构更加精简,进而使物镜的成本得以降低。
30.所述全景光学环带物镜还包括设置在所述第六透镜6与探测器焦面10之间的滤光片11。滤光片11为红外截止滤波片,以阻止红外线穿过透镜造成图片失真,同时可以阻挡不必要的热度灼伤物镜,从而提高了物镜的性能。
31.所述全景光学环带物镜还包括设置在所述全景环形透镜二8与所述第一透镜1的孔径光阑9。通过孔径光阑9可去掉光束中偏离光轴较大的光线,从而可进一步提高本实用新型物镜的清晰度和分辨率。
32.上面所述的实施例仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的构思和范围进行限定。在不脱离本实用新型设计构思的前提下,本领域普通人员对本实用新型的技术方案做出的各种变型和改进,均应落入到本实用新型的保护范围,本实用新型请求保护的技术内容,已经全部记载在权利要求书中。