1.本发明涉及镜头组件驱动设备和包括该镜头组件驱动设备的相机模块。
背景技术:
2.相机模块拍摄对象并将其存储为图像或视频,并且相机模块被安装在移动终端(如手机、笔记本电脑、无人机和车辆)中。
3.同时,诸如智能手机、平板电脑和笔记本电脑等便携式装置都内置有超小型相机模块,并且此类相机模块可以执行自动对焦(af)功能,该功能自动地调整图像传感器和镜头之间的距离以对准镜头的焦距。
4.此外,最近的相机模块能够通过变焦镜头通过增加或减少远处被摄物的放大倍数来执行放大或缩小的变焦功能。
5.此外,最近的相机模块采用图像稳定(is)技术来修正或防止由于不稳定的固定装置或用户移动导致的镜头移动而引起的图像抖动。
6.在这种图像稳定(is)技术中,存在光学图像稳定(ois)技术、使用图像传感器的图像防抖技术等。
7.ois技术是通过改变光路来修正移动的技术,而使用图像传感器的图像防抖技术是通过机械和电子方法修正移动的技术,并且ois技术正被越来越多地采用。
8.同时,在相机模块中使用变焦致动器用于变焦功能,并且当镜头由于致动器的机械移动而移动时会产生摩擦扭矩,这种摩擦扭矩会导致诸如驱动力降低、功耗增加或控制特性降低等技术问题。
9.特别地,为了在相机模块中使用多个变焦镜头组获得最佳光学特性,多个镜头组之间的对准以及多个镜头组与图像传感器之间的对准必须良好匹配,但是,当偏心(即,镜头组之间的球面中心偏离光轴)、或倾斜(即,镜头倾斜的现象)、或镜头组的中心轴线与图像传感器之间的未对准现象发生时,视角被改变或者发生失焦,从而对图像质量或分辨能力产生不利影响。
10.同时,当在摩擦所发生的区域中增加分离距离以减小相机模块中当为了变焦功能而移动镜头时的摩擦扭矩阻力时,会出现技术上不一致问题,其中当变焦移动或变焦移动反向时,镜头偏心或镜头倾斜加剧。
11.同时,当涉及越高的像素时,图像传感器具有的分辨率越高,并且像素的尺寸变得越小,随着像素变得越小,相同时间接收的光量减少。因此,相机的分辨率越高,在黑暗环境中当快门速度减慢时所出现的由于手抖而导致的图像抖动就越严重。
12.因此,为了在黑夜或移动图像中使用高像素相机捕捉没有变形的图像,近来基本上采用了ois功能。
13.同时,ois技术是通过移动相机的镜头或图像传感器来修正光路,从而修正图像质量的方法,特别地,ois技术通过陀螺仪传感器检测相机移动,并基于此计算镜头或图像传感器应移动的距离。
14.例如,ois修正方法包括镜头移动方法和模块倾斜方法。在镜头移动方法中,仅使相机模块中的镜头移动以重新对准图像传感器的中心与光轴。另一方面,模块倾斜方法是移动包括镜头和图像传感器在内的整个模块的方法。
15.特别是,模块倾斜方法具有比镜头移动方法更宽的修正范围,并且由于镜头和图像传感器之间的焦距是固定的,因此具有可以使图像变形最小化的优点。
16.同时,在镜头移动方法的情况下,使用位置识别传感器(例如,霍尔传感器)来检测镜头的位置和移动。另一方面,在模块倾斜方法中,使用光反射器来检测模块的移动。然而,这两种方法都使用陀螺仪传感器来检测相机用户的移动。
17.ois控制单元使用由陀螺仪传感器识别的数据来预测镜头或模块应移动到哪里,以修正用户的移动。
18.根据最近的技术趋势,需要超薄型和超小型相机模块,但超小型相机模块中供ois操作的空间有限,因此存在难以实施应用于一般大型相机的ois功能的问题,并且在应用ois驱动时,存在无法实现超薄和超小型相机模块的问题。
19.此外,在传统的ois技术中,在相机模块的有限尺寸内,由于ois驱动单元设置在实体镜头组件一侧上,存在用于ois的镜头尺寸受限而导致难以保证光量的问题。
20.特别是,为了从相机模块获得最佳光学特性,当通过镜头移动或模块倾斜实施ois时,镜头组之间的对准必须良好,但在现有技术的ois技术中,当偏心(即,镜头组之间的球面中心偏离光轴)、或倾斜(即,镜头倾斜的现象)发生时,会出现视角被改变或失焦的问题,从而对图像质量或分辨能力产生不利影响。
21.此外,在传统的ois技术中,可以在ois驱动的同时实施af或变焦,但是由于现有ois技术的相机模块的空间限制和驱动部件的位置,用于ois的磁体和用于af或变焦的磁体的位置彼此靠近,从而造成磁场干扰,妨碍ois正常操作,并导致偏心或倾斜的现象。
22.此外,由于镜头移动或模块倾斜需要机械驱动装置,因此现有技术的ois技术存在结构复杂、功耗增加的问题。
23.同时,本部分中描述的内容仅为本公开提供背景信息,不构成现有技术。
技术实现要素:
24.技术主题
25.本发明的目的是提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,其能够在相机模块中通过变焦使每个镜头组移动时防止产生摩擦扭矩。
26.此外,本发明的目的是提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,其能够在相机模块中通过变焦使每个镜头组移动时防止出现诸如偏心或镜头倾斜(其中镜头的中心和图像传感器的中心轴线不重合)等现象。
27.此外,本发明的目的是提供超薄和超小型镜头组件驱动设备和包括该镜头组件驱动设备的相机模块。
28.此外,本发明的目的是提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,其消除了当实施ois时在光学系统的镜头组件中镜头的尺寸限制,从而能够获得足够的光量。
29.此外,本发明的目的是提供镜头组件驱动设备和包括该镜头组件驱动设备的相机
模块,其能够在实施ois时最小化偏心或倾斜现象的发生,从而表现出最佳的光学特性。
30.此外,本发明的目的是提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,其能够防止在实施ois时与用于af或变焦的磁体的磁场干扰。
31.此外,本发明的目的是提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,其能够以低功耗实施ois。
32.技术方案
33.根据本发明的一个方面的用于实现上述目的的镜头组件驱动设备包括:第一驱动单元,设置在壳体上;镜头组件,设置在壳体中;以及第二驱动单元,设置在镜头组件中并且面向第一驱动单元,其中按照光轴方向,第一驱动单元的第一长度大于或等于第二驱动单元的第一长度,并且按照与光轴方向垂直的方向,第一驱动单元的第二长度小于第二驱动单元的第二长度。
34.此外,第二驱动单元包括磁体,并且磁体的一个表面和与该一个表面相对的另一个表面可具有不同的极性。
35.此外,第一驱动单元可以包括线圈。
36.此外,第一驱动单元可以包括第一磁轭,并且线圈可以缠绕在第一磁轭周围。
37.此外,第二驱动单元包括第二磁轭,并且第二磁轭可以设置在镜头组件与磁体之间,以与磁体的至少两个表面接触。
38.此外,线圈可以在与光轴方向垂直的方向上设置在磁体的中心处。
39.此外,还包括用于识别第二驱动单元的位置的位置识别传感器,其中位置识别传感器可以设置在第一驱动单元的上方或下方。
40.此外,位置识别传感器可以设置在第一驱动单元的侧表面与中心之间的对应位置处。
41.此外,位置识别传感器包括多个位置识别传感器,并且所述多个位置识别传感器可以设置成在光轴方向上彼此间隔开。
42.根据本发明的一个方面的用于实现上述目的的镜头组件驱动设备包括:线圈,设置在壳体中;镜头组件,设置在壳体内部;以及磁体,设置在镜头组件中且面向线圈,其中磁体在线圈的两端之间的范围内移动。
43.此外,还包括设置在镜头组件中的镜头组,并且线圈在光轴方向上的长度可以大于镜头组的长度。
44.根据本发明的一个方面的用于实现上述目的的镜头组件驱动设备包括:第一驱动单元,设置在壳体中;镜头组件,设置在壳体内;以及第二驱动单元,设置在镜头组件上并面向第一驱动单元,其中第一驱动单元和第二驱动单元包括线圈或磁体,其中当第一驱动单元是线圈时,第二驱动单元是磁体,其中当第一驱动单元是磁体时,第二驱动单元是线圈,其中按照光轴方向,线圈的第一长度大于或等于磁体的第一长度,并且其中按照与光轴方向垂直的方向,线圈的第二长度可以小于磁体的第二长度。
45.根据本发明的一个方面的用于实现上述目的的相机模块包括:壳体;镜头组件,设置在壳体内部;第一驱动单元,设置在壳体中;以及第二驱动单元,设置在镜头组件中并面向第一驱动单元,其中按照光轴方向,第一驱动单元的第一长度大于或等于第二驱动单元的第一长度,并且其中在与光轴方向垂直的方向上,第一驱动单元的第二长度小于第二驱
动单元的第二长度。
46.根据本发明的一个方面的用于实现上述目的的镜头组件驱动设备包括:壳体;镜头组件,设置在壳体中;第一驱动单元,设置在壳体中;以及第二驱动单元,设置在镜头组件中,其中镜头组件包括:第一镜头组件,设置为可相对于壳体在光轴方向上移动;以及第二镜头组件,设置于第一镜头组件,以在光轴方向上可相对于第一镜头组件移动。
47.此外,还包括第三镜头组,设置在第一镜头组件的一侧上并联接到壳体,并且第一镜头组件的第一镜头组相对于第三镜头组在光轴方向上移动,且第二镜头组件的第二镜头组相对于第一镜头组在光轴方向上移动,从而可以实施变焦功能。
48.此外,第一驱动单元包括设置在壳体内侧表面上的第一-第一驱动单元和第一-第二驱动单元,其中第二驱动单元可包括:第二-第一驱动单元,设置在第一镜头组件中并面向第一-第一驱动单元;以及第二-第二驱动单元,设置在第二镜头组件上并且面向第一-第二驱动单元。
49.此外,第一-第一驱动单元和第一-第二驱动单元是螺线管线圈,第二-第一驱动单元和第二-第二驱动单元可以是磁体。
50.此外,还包括设置在第二-第一驱动单元和第一镜头组件之间的第一磁轭以及还可包括设置在第二-第二驱动单元和第二镜头组件之间的第二磁轭。
51.此外,包括第一引导部件,所述第一引导部件联接到壳体并在光轴方向上延伸,并且第一镜头组件可以包括由第一引导部件引导的第一凹槽。
52.此外,第一引导部件包括在与光轴方向垂直的第一方向上间隔开的第一-第一引导部件和第一-第二引导部件,并且第一凹槽可以包括在与光轴方向垂直的第一方向上间隔开的第一-第一凹槽和第一-第二凹槽。
53.此外,第二驱动单元可以设置在第一-第一凹槽和第一-第二凹槽之间。
54.此外,第一-第一凹槽和第一-第二凹槽中之一可以形成“u”形,另一个可以形成“v”形。
55.此外,可以包括设置在第一镜头组件和第二镜头组件之间的第二引导部件,第二引导部件引导第二镜头组件相对于第一镜头组件的移动。
56.此外,第二引导部件可以形成球形。
57.此外,第一镜头组件包括第二凹槽,第二引导部件的一侧位于所述第二凹槽中,第二镜头组件可以包括第三凹槽,第二引导部件的另一侧位于所述第三凹槽中。
58.此外,第二引导部件包括:在与光轴方向垂直的方向上沿第一方向间隔开的第二-第一引导部件和第二-第二引导部件,其中第二凹槽包括:在与光轴方向垂直的第一方向上彼此间隔开的第二-第一凹槽和第二-第二凹槽,并且其中第三凹槽可以包括:在与光轴方向垂直的第一方向上间隔开的第三-第一凹槽和第三-第二凹槽。
59.此外,第二-第一凹槽和第二-第二凹槽中的一个可以形成“u”形,另一个可以形成“v”形。
60.此外,第三-第一凹槽和第三-第二凹槽可以形成“v”形。
61.此外,第一镜头组件包括在光轴方向上延伸的突出部件,其中第二凹槽可形成在突出部件的面向第三凹槽的内侧表面上。
62.此外,第二引导部件可以在与光轴方向垂直的第二方向上与第一引导部件重叠。
63.此外,第一镜头组件包括在光轴方向上延伸的突出部件,其中突出部件包括在面向第二镜头组件的内侧表面上形成的第二凹槽,其中第二镜头组件包括突出部分,该突出部分在突出部件的方向上突出,并形成为与第二凹槽对应的形状,其中突出部分可引导第二镜头组件相对于第一镜头组件的移动。
64.根据本发明的一个方面的用于实现上述目的的镜头组件驱动设备包括:壳体;第一镜头组件,可在光轴方向上移动地设置在壳体中;第一-第一驱动单元和第一-第二驱动单元,设置在壳体中;第二-第一驱动单元,设置在第一镜头组件中并且面向第一-第一驱动单元;第二镜头组件,在光轴方向上可移动地联接到第一镜头组件;以及第二-第二驱动单元,设置在第二镜头组件上并且面向第一-第二驱动单元。
65.根据本发明一个方面的用于实现上述目的的相机模块包括:壳体;第一镜头组件,包括第一镜头组,并在光轴方向上可移动地设置在壳体中;第一-第一驱动单元和第一-第二驱动单元,设置在壳体中;第二-第一驱动单元,设置在第一镜头组件中并且面向第一-第一驱动单元;第二镜头组件,包括第二镜头组,并在光轴方向上可移动地联接到第一镜头组件;第二-第二驱动单元,设置在第二镜头组件中并且面向第一-第二驱动单元;第三镜头组,联接到壳体,其中第一镜头组至第三镜头组在光轴方向上重叠。
66.有利效果
67.通过本实施例,可以提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,能够防止在相机模块中通过变焦而使每个镜头组移动时产生的摩擦扭矩。
68.通过本实施例,可以提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,能够防止在相机模块中通过变焦而使每个镜头组移动时发生镜头中心和图像传感器的中心轴线不重合的现象(诸如镜头偏心或镜头倾斜)。
69.此外,通过本实施例,可以提供超薄和超小型镜头组件驱动设备和相机模块。
70.此外,通过本实施例,可以提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,消除了当实施ois时在光学系统的镜头组件中镜头的尺寸限制,从而能够获得足够的光量。
71.此外,通过本实施例,可以提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,能够在实施ois时最小化偏心或倾斜现象的发生,从而表现出最佳的光学特性。
72.此外,通过本实施例,可以提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,能够防止当实施ois时与用于af或变焦的磁体的磁场干扰。
73.此外,通过本实施例,可以提供镜头组件驱动设备和包括该镜头组件驱动设备的相机模块,能够以低功耗实施ois。
附图说明
74.图1是根据本发明的实施例的相机模块的立体图。
75.图2是根据本发明的实施例的相机模块的分解立体图。
76.图3是根据本发明的实施例的相机模块的剖视图。
77.图4是根据本发明的实施例的相机模块的立体图,其中一些部件被移除。
78.图5是根据本发明的实施例的相机模块的立体图,其中一些部件被移除。
79.图6是图5的分解立体图。
80.图7和图8是图5的一些配置的立体图。
81.图9是根据本发明的实施例的相机模块的剖视图。
82.图10和图11是根据本发明的实施例的相机模块的一些配置的操作图。
83.图12是根据本发明的实施例的第一镜头驱动组件的侧视图。
84.图13是示出位置识别传感器的识别度的曲线图。
具体实施方式
85.在下文中,将参照附图详细描述本发明的优选实施例。
86.然而,本发明的技术思想不限于将要描述的一些实施例,而是可以以各种形式实现,并且在本发明的技术思想的范围内,在实施例之间可以选择性地组合或替换一个或多个组成元素。
87.此外,除非明确定义和描述,否则本发明的实施例中使用的术语(包括技术术语和科学术语)可以解释为本领域技术人员可以普遍理解的含义,并且,可以考虑相关技术的上下文的含义来解释诸如词典中定义的术语之类的常用术语。
88.此外,本说明书中使用的术语用于描述实施例,并不旨在限制本发明。
89.在本说明书中,除非在表达中明确说明,否则单数形式可以包括复数形式,且当被描述为“a、b和c中的至少一个(或多于一个)”时,其可以包括可由a、b和c组合的所有组合中的一个或多个。
90.此外,在描述本发明的实施例的部件时,可以使用诸如第一、第二、a、b、(a)和(b)等术语。这些术语仅用于对部件与其他部件进行区分,并且这些术语不限制部件的性质、次序或顺序。
91.并且,当一个部件被描述为“连接”、“联接”或“互连”到另一个部件时,该部件不仅直接连接、联接或互连到另一个部件,而且还可以包括由位于该部件与该另一部件之间的其他部件而“连接”、“联接”或“互连”的情况。
92.此外,当描述为形成或布置在每个部件“上(之上)”或“下(之下)”时,“上(之上)”或“下(之下)”意味着其不仅包括两个部件直接接触的情况,而且还包括在两个部件之间形成或布置有一个或多个其他部件的情况。此外,当表示为“上(之上)”或“下(之下)”时,不仅包括基于一个部件的向上方向的含义,还包括基于一个部件的向下方向的含义。
93.下文使用的“光轴方向”被定义为联接到镜头组件驱动设备的每个镜头组的光轴方向。
94.在下文中,将参考附图更详细地描述本发明。
95.图1是根据本发明的实施例的相机模块的立体图。图2是根据本发明的实施例的相机模块的分解立体图。图3是根据本发明的实施例的相机模块的剖视图。图4是根据本发明的实施例的相机模块的立体图,其中一些部件被移除。图5是根据本发明的实施例的相机模块的立体图,其中一些部件被移除。图6是图5的分解立体图。图7和图8是图5的一些配置的立体图。图9是根据本发明的实施例的相机模块的剖视图。
96.参考图1至图8,根据本发明的实施例的相机模块10可以包括:壳体组件100;第一驱动单元130和150;基板200;第一镜头组件300;第二镜头组件400;第二驱动单元370和470和止动件500;盖组件600;以及传感器组件700,但不排除除此之外的任何附加配置。
97.相机模块10可以包括壳体组件100。壳体组件100可以形成相机模块10的外观。壳体组件100可以形成露出内部的六面体形状。基板200、第一镜头组件300、第二镜头组件400、止动件500、盖组件600和传感器组件700可以设置在壳体组件100中。第三镜头组110可以设置在壳体组件100中。第一驱动单元130和150可以设置在壳体组件100中。引导部件120可以设置在壳体组件100中。位置识别传感器140和160可以设置在壳体组件100中。壳体组件100可被称为“壳体”。
98.相机模块10可以包括第三镜头组110。第三镜头组110可以设置在壳体组件100上。第三镜头组110可以固定至壳体组件100。第三镜头组110可以固定至壳体组件100的后表面。第三镜头组110可以设置在第一镜头组320的一侧上。第三镜头组110可以包括至少一个镜头。
99.相机模块10可以包括第一驱动单元130和150。第一驱动单元130和150可以设置在壳体组件100中。第一驱动单元130和150可以设置在壳体组件100的内侧表面上。第一驱动单元130和150可以面向第二驱动单元370和470。第一驱动单元130和150可以包括线圈或磁体。当第二驱动单元370和470是磁体时,第一驱动单元130和150可以是线圈。当第二驱动单元370和470是线圈时,第一驱动单元130和150可以是磁体。第一驱动单元130和150可以通过与第二驱动单元370和470的电磁相互作用而使第一镜头组件300和第二镜头组件400在光轴方向上移动。由此,可以实施变焦功能。
100.第一驱动单元130和150在光轴方向上的第一长度可以大于或等于第二驱动单元370和470在光轴方向上的第一长度。第一驱动单元130和150在与光轴方向垂直的方向上的第二长度可以小于第二驱动单元370和470在与光轴方向垂直的方向上的第二长度。在与光轴方向垂直的方向上,第一驱动单元130和150可以设置在第二驱动单元370和470的中心处。在与光轴方向垂直的方向上,第一驱动单元130和150可以与第二驱动单元370和470的中心区域重叠。在光轴方向上,第二驱动单元370和470可以在第一驱动单元130和150的两端的范围内(例如在第一长度的范围内)移动。第一驱动单元130和150可以形成为基于光轴方向比第一镜头组至第三镜头组320、420和110中的一个在光轴方向上的长度长。例如,第一驱动单元130和150在光轴方向上的第一长度可以大于第一镜头组至第三镜头组320、420和110在光轴方向上的第一长度。
101.第一驱动单元130和150可以包括第一-第一驱动单元150和第一-第二驱动单元130。第一-第一驱动单元150和第一-第二驱动单元130可以彼此间隔开。第一-第一驱动单元130设置在壳体组件100的内侧表面上,并且第一-第二驱动单元150可以设置在壳体组件100的内侧表面的一表面上,该表面面向第一-第一驱动单元130所设置的表面。
102.第一-第一驱动单元150可以设置在壳体组件100的内侧表面上。第一-第一驱动单元150可以是线圈。第一-第一驱动单元150可以围绕在光轴方向上延伸的第一-第一磁轭151。由此,可以增强第一-第一驱动单元150的电磁力。第一-第一驱动单元150可以面向第二-第一驱动单元370。第一-第一驱动单元150可以通过与第二-第一驱动单元370的电磁相互作用而使第一镜头组件300和/或第二镜头组件400在光轴方向上移动。在本发明的实施例中,作为示例,描述了第一-第一驱动单元150通过与第二-第一驱动单元370的电磁相互作用而使第一镜头组件300和第二镜头组件400在光轴方向上移动,但不限于此。
103.第一-第二驱动单元130可以设置在壳体组件100的内侧表面上。第一-第二驱动单
元130可以是线圈。第一-第二驱动单元130可以围绕在光轴方向上延伸的第一-第二磁轭131。由此,可以增强第一-第二驱动单元130的电磁力。第一-第二驱动单元130可以面向第二-第二驱动单元470。第一-第二驱动单元130可以通过与第二-第二驱动单元470的电磁相互作用而使第一镜头组件300和/或第二镜头组件400在光轴方向上移动。在本发明的实施例中,作为示例,描述了第一-第二驱动单元130通过与第二-第二驱动单元470的电磁相互作用而使第二镜头组件400相对于第一镜头组件300在光轴方向上移动,但不限于此。
104.相机模块10可以包括引导部件120。引导部件120可以设置在壳体组件100中。引导部件120可以在光轴方向上延伸。引导部件120可以固定至壳体组件100。引导部件120可以固定至壳体组件100的固定部件105和106。引导部件120可以与第一镜头组件300接触。引导部件120可以设置在第一镜头组件300的第一本体310的第一侧表面312的第一-第二侧表面凹槽3124和第一-第三侧表面凹槽3126中。由此,第一镜头组件300在光轴方向上的移动可以被引导。
105.引导部件120可以包括第一引导部件122和第二引导部件124。第一引导部件122和第二引导部件124可以分别在光轴方向上延伸。第一引导部件122和第二引导部件124可以彼此平行地设置。
106.第一引导部件122可以固定至壳体组件100。第一引导部件122可以固定至壳体组件100的第一固定部件105。第一引导部件122可以设置在第一-第二侧表面凹槽3124中。第一引导部件122可与第一-第二侧表面凹槽3124的内侧表面接触。第一引导部件122可以设置在第二引导部件124的上方。
107.第二引导部件124可以固定至壳体组件100。第二引导部件124可以固定至壳体组件100的第二固定部件106。第二引导部件124可以设置在第一-第三侧表面凹槽3126中。第二引导部件124可与第一-第三侧表面凹槽3126的内侧表面接触。第二引导部件124可以设置在第一引导部件122的下方。
108.在本发明的实施例中,作为示例,描述了第一引导部件122和第二引导部件124形成为在光轴方向上延伸的棒状,但不限于此,第一引导部件122和第二引导部件124的横截面形状可以被各种改变。
109.相机模块10可以包括位置识别传感器140和160。位置识别传感器140和160可以设置在壳体组件100中。位置识别传感器140和160可以设置在壳体组件100的内侧表面上。位置识别传感器140和160可以面向第二驱动单元370和470。位置识别传感器140和160可以识别通过与第一驱动单元130和150的电磁相互而移动的第二驱动单元370和470的位置。位置识别传感器140和160可以包括霍尔传感器。位置识别传感器140和160可以设置在第一驱动单元130和150的上方或下方。位置识别传感器140和160可以设置在第一驱动单元130和150的侧表面与中心之间的相应位置处。例如,位置识别传感器140和160可以在垂直于光轴方向的方向上与第一驱动单元130和150的侧表面和中心之间的区域重叠。
110.位置识别传感器140和160可以包括多个位置识别传感器140和160。位置识别传感器140和160可以包括第一位置识别传感器160和第二位置识别传感器140。
111.第一位置识别传感器160可以设置在壳体组件100的内侧表面上。第一位置识别传感器160可以面向第二-第一驱动单元370。第一位置识别传感器160可以设置在第一-第一驱动单元150的上方或下方。第一位置识别传感器160可以设置在第一-第一驱动单元150的
下方。
112.第一位置识别传感器160可以包括第一-第一位置识别传感器162和第一-第二位置识别传感器164。第一-第一位置识别传感器162和第一-第二位置识别传感器164可以在光轴方向上设置成彼此间隔开。将第一-第一位置识别传感器162和第一-第二位置识别传感器164连接的假想线可以平行于第一-第一驱动单元150。第一-第一位置识别传感器162可以设置在第一-第一驱动单元150的一侧和中心区域之间的对应位置处。例如,第一-第一位置识别传感器162可以在垂直于光轴方向的方向上与第一-第一驱动单元150的一个侧表面和中心区域之间的区域重叠。第一-第二位置识别传感器164可以设置在与第一-第一驱动单元150的另一个侧表面和中心区域的对应位置处。例如,第一-第二位置识别传感器164可以在垂直于光轴方向的方向上与第一-第一驱动单元150的中心区域和另一个侧表面之间的区域重叠。
113.第二位置识别传感器140可以设置在壳体组件100之中的一表面,该表面面向设有第一位置识别传感器160的表面。第二位置识别传感器140可以面向第二-第二驱动单元470。第二位置识别传感器140可以设置在第一-第二驱动单元130的上方或下方。第二位置识别传感器140可以设置在第一-第二驱动单元130的下方。
114.第二位置识别传感器140可以包括第二-第一位置识别传感器142和第二-第二位置识别传感器144。第二-第一位置识别传感器142和第二-第二位置识别传感器144可以在光轴方向上设置成彼此间隔开。将第二-第一位置识别传感器142和第二-第二位置识别传感器144连接的假想线可以平行于第一-第二驱动单元130。第二-第一位置识别传感器142可以设置在第一-第二驱动单元130的一个侧表面和中心区域之间的对应位置处。例如,第二-第一位置识别传感器142可以在垂直于光轴方向的方向上与第一-第二驱动单元130的一个侧表面和中心区域之间的区域重叠。第二-第二位置识别传感器144可以设置在与第一-第二驱动单元130的中心区域和另一个侧表面的对应位置处。例如,第二-第二位置识别传感器144可以在垂直于光轴方向的方向上与第一-第二驱动单元130的中心区域和另一个侧表面之间的区域重叠。
115.在本发明的实施例中,第二驱动单元370和470在第一驱动单元130和150沿光轴方向的第一长度内移动,并且由于通过两个位置识别传感器对142和144以及162和164(每个对应于第二驱动单元370和470)来感测位置,所以可以提高效率。
116.相机模块10可以包括基板200。基板200可以设置在壳体组件100中。基板200可围绕壳体组件100。基板200可向设置在壳体组件100内的部件提供电力或电流。基板200可以包括柔性基板。基板200可以包括柔性印刷电路板(fpcb)。
117.相机模块10可以包括第一镜头组件300。第一镜头组件300可以设置在壳体组件100中。第一镜头组件300可以设置在壳体组件100内。第一镜头组件300可以在光轴方向上可移动地设置在壳体组件100内。第一镜头组件300可以在光轴方向上与第三镜头组110重叠。第二镜头组件400可以设置在第一镜头组件300中。通过第一-第一驱动单元150和第二-第一驱动单元370之间的电磁相互作用,第一镜头组件300可以在光轴方向上移动。由此,可以调整从第一镜头组件300连同第二镜头组件400到第三镜头组110的距离。由此,可以实施相机模块10的变焦功能。第一镜头组件300在光轴方向上的移动可以通过引导部件120被引导。
118.第二-第一磁轭360和第二-第一驱动单元370可以设置在第一镜头组件300中。第二镜头组件400可以设置在第一镜头组件300中。止动件500可以联接至第一镜头组件300。第一镜头组件300可以包括第一本体310和第一镜头组320。
119.第一镜头组320可以设置在第一本体310中。第一镜头组320可以在光轴方向上与第三镜头组110和第二镜头组420重叠。第一镜头组320可以包括至少一个镜头。
120.第一本体310可以设置在壳体组件100内。第二本体410可以设置在第一本体310中。第一镜头组320可以设置在第一本体310的中心区域中。第一本体310可以包括第一侧表面312、第一突出部件322和324以及第二突出部件332和334。
121.第一侧表面312可以面向壳体组件100的内侧表面。第一侧表面312可以面向第一-第一驱动单元150和第一位置识别传感器160。第一侧表面312可以包括第一-第一侧表面凹槽3122、第一-第二侧表面凹槽3124和第一-第三侧表面凹槽3126。
122.第一-第一侧表面凹槽3122可以设置为比第一-第二侧表面凹槽3124和第一-第三侧表面凹槽3126更向外。第二-第一磁轭360和第二-第一驱动单元370可以设置在第一-第一侧表面凹槽3122中。第一引导突起3122a可以形成在第一-第二侧表面凹槽3122中。第一引导突起3122a可被插入第二-第一磁轭360的第一磁轭凹槽362中。由此,可以引导第二-第一磁轭360相对于第一-第一侧表面凹槽3122的位置。
123.引导部件120可以设置在第一-第二侧表面凹槽3124和第一-第三侧表面凹槽3126中。第一引导部件122可以设置在第一-第二侧表面凹槽3124中。第二引导部件124可以设置在第一-第三侧表面凹槽3126中。第一-第二侧表面凹槽3124的内侧表面和第一-第三侧表面凹槽3126的内侧表面中的一个形成为“u”形,另一个可以形成为“v”形。也就是说,第一镜头组件300的移动可以通过使用与引导部件120的不同数量接触点来被有效地引导。
124.第一突出部件322和324以及第二突出部件332和334可以在光轴方向上延伸。第一突出部件322和324可以设置为比第二突出部件332和334更向外。第一突出部件322和324在光轴方向上的长度可以大于第二突出部件332和334在光轴方向上的长度。第二镜头组件400的第二本体410可以设置在第一突出部件322和324与第二突出部件332和334之间。
125.第一突出部件322和324可以包括第一-第一突出部件322和第一-第二突出部件324。第一-第一突出部件322和第一-第二突出部件324可以在与光轴方向垂直的方向上彼此隔开。第一-第一突出部件322可以包括第一-第一突出凹槽3322,第一-第二突出部件324可以包括第一-第二突出凹槽3242。引导球(guide ball,阀球导向器)480可以设置在第一-第一突出凹槽3322和第一-第二突出凹槽3242中。第一引导球482可以设置在第一-第一突出凹槽3322中,第二引导球484可以设置在第一-第二突出凹槽3242中。第一-第一突出凹槽3322的内侧表面和第一-第二突出凹槽3242的内侧表面中之一形成为“u”形,另一个可以形成为“v”形。由此,第二镜头组件400相对于第一镜头组件300的移动可以被有效地引导。
126.第一突出部件322和324可以包括形成在端部处的联接凹槽3224和3244。具体地说,第一联接凹槽3224可以形成在第一-第一突出部件322的端部处,并且第二联接凹槽3244可以形成在第一-第二突出部件324的端部处。止动件500的联接突起520和530可以被插入在第一联接凹槽3224和第二联接凹槽3244中以及形成在第一本体310的前表面上的第三联接凹槽316中。例如,第一联接突起520扣合联接至第三联接凹槽316,第二-第一联接突起532扣合联接至第一联接凹槽3224,并且第二-第二联接突起534可以扣合联接至第二联
接凹槽3244,从而将止动件500联接到第一镜头组件300。
127.相机模块10可以包括第二镜头组件400。第二镜头组件400可以设置在壳体组件100中。第二镜头组件400可以设置在壳体组件100内。第二镜头组件400可以在光轴方向上与第三镜头组110和第一镜头组件300重叠。第二镜头组件400可以设置在第一镜头组件300中。第二镜头组件400可以设置在第一镜头组件300中以在光轴方向上可移动。通过第一-第一驱动单元150和第二-第一驱动单元370之间的电磁相互作用,第二镜头组件400可以与第一镜头组件300一起在光轴方向上移动。由此,可以调整在光轴方向上第二镜头组件400到第三镜头组110的距离。通过第一-第二驱动单元130和第二-第二驱动单元470之间的电磁相互作用,第二镜头组件400可以相对于第一镜头组件300在光轴方向上移动。由此,可以调整在光轴方向上第二镜头组件400到第一镜头组件300的距离。即,可以实施相机模块10的变焦功能。第二镜头组件400在光轴方向上的移动可以通过引导球480被引导。
128.第二-第二磁轭460和第二-第二驱动单元470可以设置在第二镜头组件400中。第二镜头组件400可以包括第二本体410和第二镜头组420。
129.第二镜头组420可以设置在第二本体410中。第二镜头组420可以在光轴方向上与第三镜头组110和第一镜头组320重叠。第二镜头组420可以包括至少一个镜头。
130.第二本体410可以设置在壳体组件100中。第二本体410可以设置在第一本体310中。第二本体410可以设置在第一本体310的第一突出部件322和324与第二突出部件332和334之间。第二镜头组420可以设置在第二本体410的中心区域中。第二本体410可以包括第二侧表面412。
131.第二侧表面412可以面向壳体组件100的内侧表面。第二侧表面412可以面向一表面,该表面面向壳体组件100的内侧表面中的第一侧表面312。第二侧表面412可以面向第一-第二驱动单元130和第二位置识别传感器140。第二侧表面412可以包括第二-第一侧表面凹槽4122、第二-第二侧表面凹槽4124和第二-第三侧表面凹槽4126。
132.第二-第一侧表面凹槽4122可以设置为比第二-第二侧表面凹槽4124和第二-第三侧表面凹槽4126更向外。第二-第二磁轭460和第二-第二驱动单元470可以设置在第二-第一侧表面凹槽4122中。第二引导突起4122a可以形成在第二-第一侧表面凹槽4122中。第二引导突起4122a可被插入第二-第二磁轭460的第二磁轭凹槽462中。由此,可以引导第二-第二磁轭460相对于第二-第一侧表面凹槽4122的位置。
133.第二-第二侧表面凹槽4124可以面向第一-第一突出凹槽3322。第二-第三侧表面凹槽4126可以面向第一-第二突出凹槽3342。引导球480可以设置在第二-第二侧表面凹槽4124和第二-第三侧表面凹槽4126中。第一引导球482可以设置在第二-第二侧表面凹槽4124中。第二引导球484可以设置在第二-第三侧表面凹槽4126中。第二-第二侧表面凹槽2124的内侧表面和第二-第三侧表面凹槽4126的内侧表面可以形成“v”形。由此,可以保持与引导球480的两点接触。与此不同,第二-第二侧表面凹槽2124的内侧表面和第二-第三侧表面凹槽4126的内侧表面中的一个形成为“u”形,另一个可以形成为“v”形。
134.第二-第二侧表面凹槽4124可以包括多个第二-第二侧表面凹槽4124。朝向第一镜头组件300突出的引导突起(未示出)可以包含在多个第二-第二侧表面凹槽4124之间。引导突起可被插入第一镜头组件300的第一-第一突出凹槽3322中。
135.第二-第三侧表面凹槽4126可以包括多个第二-第三侧表面凹槽4126。在第一镜头
组件300的方向上突出的引导突起(未示出)可以包含在多个第二-第三侧表面凹槽4126之间。引导突起可被插入第一镜头组件300的第一-第二突出凹槽3242中。
136.由此,即使在没有引导球480的情况下,第二镜头组件400在光轴方向上相对于第一镜头组件300的移动也可以被引导。
137.相机模块10可以包括引导球480。引导球480可以引导第二镜头组件400相对于第一镜头组件300在光轴方向上的移动。引导球480可以包括第一引导球482和第二引导球484。第一引导球482可以设置在第二-第二侧表面凹槽4124和第一-第一突出凹槽3322之间。第一引导球482可以包括在光轴方向上彼此间隔开设置的多个第一引导球。第二引导球484可以设置在第二-第三侧表面凹槽4126和第一-第二突出凹槽3342之间。第二引导球484可以包括在光轴方向上彼此间隔开设置的多个第二引导球。
138.相机模块10可以包括第二驱动单元370和470。第二驱动单元370和470可以设置在镜头组件300和400中。第二驱动单元370和470可以设置在镜头组件300和400的第一侧表面312和第二侧表面412中。第二驱动单元370和470可以面向第一驱动单元130和150。第二驱动单元370和470可以包括线圈或磁体。当第一驱动单元130和150是磁体时,第二驱动单元370和470可以是线圈。当第一驱动单元130和150是线圈时,第二驱动单元370和470可以是磁体。第二驱动单元370和470可以通过与第一驱动单元130和150的电磁相互作用而使第一镜头组件300和第二镜头组件400在光轴方向上移动。由此,可以实施变焦功能。
139.第二驱动单元370和470在光轴方向上的第一长度可以小于或等于第一驱动单元130和150在光轴方向上的第一长度。第二驱动单元370和470在与光轴方向垂直的方向上的第二长度可以大于第一驱动单元130和150在与光轴方向垂直的方向上的第二长度。在与光轴方向垂直的方向上,第一驱动单元130和150可以设置在与第二驱动单元370和470的中心区域对应的位置处。例如,在与光轴方向垂直的方向上,第二驱动单元370和470的中心区域可以与第一驱动单元130和150重叠。在光轴方向上,第二驱动单元370和470可以在第一驱动单元130和150的两端的范围内(例如在第一长度的范围内)移动。第二驱动单元370和470可以面向位置识别传感器140和160。由此,可以识别第一镜头组件300和第二镜头组件400的位置。
140.第二驱动单元370和470可以包括第二-第一驱动单元370和第二-第二驱动单元470。第二-第一驱动单元370和第二-第二驱动单元470可以彼此间隔开。第二-第一驱动单元370可以设置在第一镜头组件300中,第二-第二驱动单元470可以设置在第二镜头组件400中。
141.第二-第一驱动单元370可以设置在第一镜头组件300的第一侧表面312中。第二-第一驱动单元370可以设置在第一-第一侧表面凹槽3122中。第二-第一磁轭360可以设置在第二-第一驱动单元370和第一-第一侧表面凹槽3122之间。第二-第一驱动单元370的至少两个表面可被第二-第一磁轭360包围。由此,可以减少电磁力的泄漏。第二-第一驱动单元370可以面向第一-第一驱动单元150。第二-第一驱动单元370可以通过与第一-第一驱动单元150的电磁相互作用而使第一镜头组件300和/或第二镜头组件400在光轴方向上移动。在本发明的实施例中,作为示例,描述了第二-第一驱动单元370通过与第一-第一驱动单元150的电磁相互作用而使第一镜头组件300和第二镜头组件400在光轴方向上移动,但不限于此。
142.第二-第一驱动单元370可以面向第一位置识别传感器160。第二-第一驱动单元370可以面向第一-第一位置识别传感器162和第一-第二位置识别传感器164。第二-第一驱动单元370的一个表面可以被磁化为第一极性372,另一个表面可以被磁化为第二极性374。在这种情况下,第一极性372可以面向第一位置识别传感器160,第二极性374可以与第二-第一磁轭360接触。
143.第二-第二驱动单元470可以设置在第二镜头组件400的第二侧表面412上。第二-第二驱动单元470可以设置在第二-第一侧表面凹槽4122中。第二-第二磁轭460可以设置在第二-第二驱动单元470和第二-第一侧表面凹槽4122之间。第二-第二驱动单元470的至少两个表面可被第二-第二磁轭470包围。由此,可以减少电磁力的泄漏。第二-第二驱动单元470可以面向第一-第二驱动单元130。第二-第二驱动单元470可以通过与第一-第二驱动单元130的电磁相互作用而使第一镜头组件300和/或第二镜头组件400在光轴方向上移动。在本发明的实施例中,作为示例,描述了第二-第二驱动单元470通过与第一-第二驱动单元130的电磁相互作用而使第二镜头组件400在光轴方向上相对于第一镜头组件300移动,但不限于此。
144.第二-第二驱动单元470可以面向第二位置识别传感器140。第二-第二驱动单元470可以面向第二-第一位置识别传感器142和第二-第二位置识别传感器144。第二-第二驱动单元470的一个表面可以被磁化为第一极性472,另一个表面可以被磁化为第二极性474。在这种情况下,第一极性472可以面向第二位置识别传感器140,第二极性474可以与第二-第二磁轭460接触。
145.相机模块10可以包括止动件500。止动件500可以设置在壳体组件100中。止动件500可以设置在壳体组件100中。止动件500可以联接到第一镜头组件300。由此,止动件500可以限制第二镜头组件400相对于第一镜头组件300移动的移动距离。止动件500可以包括开口510、第一联接突起520和第二联接突起530。
146.开口510可形成在止动件500的中心区域中。开口510可在光轴方向上与第一镜头组至第三镜头组320、420和110重叠。由透光材料制成的透光部件(未示出)可以设置在开口510中。
147.第一联接突起520可以从止动件500的一侧向后突出。第一联接突起520可被插入并联接到第一镜头组件300的第三联接凹槽316。例如,第一联接突起520可以扣合联接到第一镜头组件300的第三联接凹槽316。
148.第二联接突起530可从止动件500的另一侧向后突出。第二联接突起530可以包括第二-第一联接突起532和第二-第二联接突起534。第二-第一联接突起532可被插入并联接到第一镜头组件300的第一联接凹槽3224。例如,第二-第一联接突起532可以扣合联接到第一镜头组件300的第一联接凹槽3224。第二-第二联接突起534可以被插入并联接到第一镜头组件300的第二联接凹槽3244。例如,第二-第二联接突起534可以扣合到第一镜头组件300的第二联接凹槽3244。
149.相机模块10可以包括盖组件600。盖组件600可以联接到壳体组件100的一侧。第一镜头组件300、第二镜头组件400和止动件500可以设置在盖组件600和壳体组件100的内部空间中。盖组件600可以包括在中心区域形成的开口(未示出)。盖组件600的开口可在光轴方向上与第一镜头组至第三镜头组320、420和110以及止动件500的开口510重叠。由透光材
料制成的透光部件(未示出)可以设置在盖组件600的开口中。
150.相机模块10可以包括传感器组件700。传感器组件700可以联接到壳体组件100。图像传感器可以设置在传感器组件700。传感器组件700的图像传感器可接收穿过第一镜头组置第三镜头组320、420和110的光并将其转换为图像。
151.图10和图11是根据本发明的实施例的相机模块的一些配置的操作图。
152.参考图10和图11,可以看到第一镜头组件300和第二镜头组件400相对于第三镜头组110移动。具体地,可以调整在光轴方向上从第一镜头组320和第二镜头组420到第三镜头组110的距离。由此,可以实施相机模块10的变焦功能。
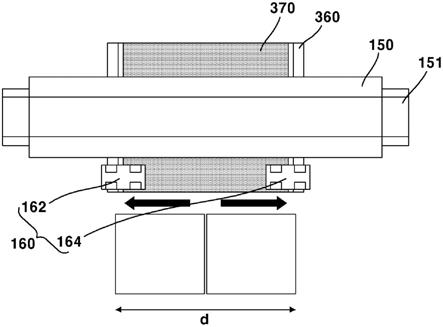
153.图12是根据本发明的实施例的第一镜头驱动组件的侧视图。图13是示出位置识别传感器的识别度的曲线图。
154.参考图12和图13,在第一-第二驱动单元370通过第一-第一驱动单元150与第二-第一驱动单元370之间的电磁相互作用而在光轴方向上移动时,可以通过第一位置识别传感器160找到第一位置识别传感器160的识别度。也就是说,可以通过两个位置识别传感器162和164(即第一-第一位置识别传感器162和第一-第二位置识别传感器164)来识别第二-第一驱动单元370的稳定位置。
155.在这种情况下,第一位置识别传感器162的某个区域和第一-第二位置识别传感器163的某个区域之间的长度d可以等于或大于第二-第一驱动单元370在光轴方向上的第一方向上的长度。由此,可以增强对第二-第一驱动单元370的位置的识别。
156.上文已经参考附图描述了本发明的实施例,但是本发明所属领域的技术人员可以理解,可以在不改变技术构思或基本特征的情况下以其他特定形式实施本发明。因此,应当理解,上述实施例在所有方面都是说明性的和非限制性的。