1.本公开涉及一种光学系统以及一种组装光学系统的方法。
背景技术:
2.随着科技的发展,目前许多电子装置(例如:平板电脑、智能手机)皆装设了光学系统。使用者可通过光学系统进行拍摄。然而,在组装光学系统时,可能因为元件之间累积的组装公差导致元件并未对准,使得拍摄效果不佳,例如,画面中心偏移、影像不清晰等。因此,在组装光学系统时,开始广泛采用主动对准(active alignment,aa)制程。详细来说,主动对准制程可检测半成品的实际位置,并调整接下来要组装的元件的位置,使得元件的相对位置尽量对准。
技术实现要素:
3.本公开的一些实施例提供一种光学系统。光学系统包括一固定部、一第一活动部、一驱动组件、一定位组件。第一活动部用以连接一第一光学元件。第一活动部可相对固定部运动。驱动组件用以驱动第一活动部相对固定部运动。定位组件用以在一第一组装步骤时将第一活动部相对固定部定位于一第一组装位置。第一组装步骤包括将第一光学元件组装于光学系统。
4.在一些实施例中,光学系统还包括一第二活动部。固定部的至少部分位于第一活动部与第二活动部之间。第二活动部可相对固定部运动。在第一组装步骤时,定位组件用以将第二活动部相对固定部定位于一第二组装位置。
5.在一些实施例中,定位组件包括一组装定位部,用以对应一组装设备,组装设备用以暂时固定第一活动部于第一组装位置。在一些实施例中,定位组件还包括一通电定位部,固定地设置于固定部或第一活动部或第二活动部或驱动组件。通电定位部用以对应组装设备的一电源,电源用以对定位组件通电,以暂时固定第一活动部于第一组装位置。当组装设备暂时固定第一活动部于第一组装位置时,通电定位部直接接触组装设备的至少部分。通电定位部包括金属裸露部,用以对应组装设备的一临时接脚。在一些实施例中,组装定位部与通电定位部一体成形。
6.在一些实施例中,光学系统还包括一第二光学元件。在第一组装步骤之后进行一第二组装步骤,在第二组装步骤时,将第二光学元件相对固定部定位,使得第一光学元件的一第一光轴与第二光学元件的一第二光轴重合。定位组件包括板状结构。第一活动部与固定部沿着一主轴排列。沿着主轴观察时,定位组件的一移除部与固定部不重叠。在第二组装步骤之后,移除定位组件的移除部。移除部在主轴的最大尺寸小于定位组件的其余部分的最大尺寸。在一些实施例中,定位组件包括金属材料,且定位组件固定地连接第一活动部或固定部。定位组件的至少部分埋藏于第一活动部的一第一承载座或固定部的一底座中,且第一承载座或底座包括树脂材料。
7.在一些实施例中,光学系统还包括一电路组件。电路组件用以电性连接一电子装
置,其中驱动组件经由电路组件电性连接电子装置。定位组件包括一回路,用以连接一组装设备。当电子装置输出一驱动信号至光学系统时,驱动信号未经过回路的至少部分。
8.本公开提供一种组装光学系统的方法。方法包括组装一光学系统,其中光学系统包括一活动部、一固定部、一定位组件,且光学系统用以连接一第一光学元件以及一第二光学元件。方法还包括通过一组装设备接触定位组件,以将活动部相对固定部进行暂时性的固定。方法还包括安装第一光学元件、第二光学元件、一对外电路,使得第一光学元件的一第一光轴与第二光学元件的一第二光轴重合,其中对外电路用以电性连接一电子装置。方法还包括移除组装设备。在一些实施例中,方法还包括移除定位组件的至少部分。
附图说明
9.当阅读所附图式时,从以下的详细描述能最佳理解本公开的各方面。应注意的是,根据业界的标准作法,各种特征并未按照比例绘制。事实上,可任意的放大或缩小元件的尺寸,以做清楚的说明。
10.图1是电子装置、第一光学元件、第二光学元件、光学系统的示意图。
11.图2是第一光学元件、第二光学元件、光学系统的示意图。
12.图3是图2中的光学系统的爆炸图。
13.图4是图2中的光学系统在第一组装步骤时的示意图。
14.图5是图2中的光学系统在第二组装步骤时的示意图。
15.图6是一些其他实施例中的光学系统的第二承载座的立体图。
16.图7是又一些其他实施例中的光学系统的第二承载座的立体图。
17.图8是图7中的光学系统在第一组装步骤时的示意图。
18.图9是组装光学系统的方法的流程图。
19.其中,附图标记说明如下:
20.10:电子装置
21.11:第一光学元件
22.12:第二光学元件:
23.100:光学系统
24.110:外罩
25.111:第一光轴
26.120:顶盖
27.121:第二光轴
28.130:外壳
29.140:第一电路板
30.150:第一承载座
31.160:上弹性元件
32.170:下弹性元件
33.180:磁性元件
34.190:线圈
35.200:底座
36.210:定位元件
37.220:固定板
38.230:活动板
39.240:偏压元件
40.250,250a,250b:第二承载座
41.260:第二电路板
42.300,300b:组装设备
43.301b:接触部
44.400:切割设备
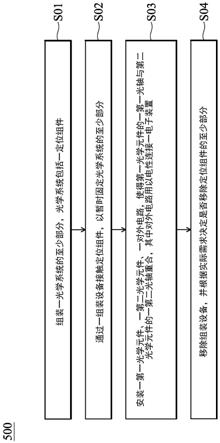
45.500:方法
46.1001:主轴
47.1101:突出部
48.2101:本体
49.2102:移除部
50.2103:组装定位部
51.2104:通电定位部
52.d1:第一驱动组件
53.d2:第二驱动组件
54.e:弹性组件
55.i:固定部
56.l:光线
57.l1:光入射侧
58.m1:第一活动部
59.m2:第二活动部
60.p,pa,pb:定位组件
61.s01,s02,s03,s04:步骤
具体实施方式
62.以下的公开内容提供许多不同的实施例或范例,并叙述各个构件以及排列方式的特定范例,以实施本公开的不同特征。在说明书以及申请专利范围中的序数,例如“第一”、“第二”等,并没有顺序上的先后关系,其仅用以标示区分具有相同名字的不同元件。除此之外,在本公开的不同范例中,可能使用重复的符号或字母。
63.实施例中可能使用相对性的空间相关用词,例如:“在
…
下方”、“下方”、“在
…
上方”、“上方”等用词,是为了便于描述图式中元件或特征与其他元件或特征之间的关系。除了在图式中绘示的方位外,这些空间相关用词意欲包含使用中或操作中的装置之不同方位。装置可被转向不同方位(旋转90度或其他方位),则在此使用的空间相关词亦可依此相同解释。
64.请参考图1以及图2。图1是一电子装置10、一第一光学元件11、一第二光学元件12、一光学系统100的示意图。图2是第一光学元件11、第二光学元件12、光学系统100的示意图。
电子装置10可为平板电脑、智能手机等。光学系统100通常设置于电子装置10的顶部区域。光学系统100用以连接第一光学元件11以及第二光学元件12。第一光学元件11可为镜头,例如,透镜。在一些实施例中,第一光学元件11的轮廓可为圆形、椭圆形、具有直线段的圆形或椭圆形等。第二光学元件12可为感光元件,例如,感光耦接检测器(charge-coupled detector,ccd)。在一些实施例中,第二光学元件12的轮廓可为多边形,例如,长方形。当一光线l从光学系统100的外部进入光学系统100时,光线l会通过第一光学元件11,并在第二光学元件12上成像。因此,可将光学系统100靠近第一光学元件11的一侧定义为一光入射侧l1。
65.第一光学元件11包括一第一光轴111,第一光轴111为通过第一光学元件11的中心的虚拟轴线。第二光学元件12包括一第二光轴121,第二光轴121为通过第二光学元件12的中心的虚拟轴线。光学系统100包括一主轴1001,主轴1001为穿过并垂直于整个光学系统100的虚拟轴线。在图式以及以下内容中将通过第一光轴111、第二光轴121、主轴1001来辅助说明本公开的相关特征。
66.图3是图2中的光学系统100的爆炸图。在本实施例中,光学系统100包括一固定部i、一第一活动部m1、一弹性组件e、一第一驱动组件d1、一第一电路组件c1、一第二活动部m2、一第二驱动组件d2、一第二电路组件c2、一定位组件p。
67.在光学系统100被用以拍摄影像时,第一驱动组件d1可驱动第一活动部m1相对固定部i移动,而第二驱动组件d2可驱动第二活动部m2相对固定部i移动。第一活动部m1带动第一光学元件11相对固定部i的运动可达到对焦,并通常被称为自动对焦(auto focus,af)。又,第二活动部m2带动第二光学元件12相对固定部i的移动可弥补因为使用者的晃动或受到外力冲击使得成像相对原位置产生偏移以及影像模糊的问题,提升光学系统100捕捉动态的效果,并通常被称为感测器偏移(sensor-shift)。
68.如图3所示,在本实施例中,固定部i包括一外罩110、一顶盖120、一外壳130、一底座200。第一活动部m1包括一第一承载座150。弹性组件e包括一上弹性元件160以及一下弹性元件170。第一驱动组件d1包括至少一磁性元件180以及至少一线圈190。第一电路组件c1包括一第一电路板140。第二活动部m2包括一第二承载座250。第二驱动组件d2包括一固定板220、一活动板230、至少一偏压元件240。第二电路组件c2包括一第二电路板260。定位组件p包括一定位元件210。其中,元件可依照使用者需求增添或删减。
69.固定部i的顶盖120、外壳130、底座200沿着主轴1001排列。外壳130可通过焊接或熔接等方式与底座200结合,结合之后内部形成的空间可容纳第一活动部m1、弹性组件e、第一驱动组件d1、第一电路组件c1等。底座200位于第一活动部m1与第二活动部m2之间。
70.第一活动部m1的第一承载座150用以连接第一光学元件11。第一承载座150与第一光学元件11之间可配置有相互对应的螺牙结构,使得第一光学元件11更佳地固定于第一承载座150。第一承载座150与外壳130以及底座200皆相隔一距离。详细来说,通过弹性组件e,第一承载座150并未直接接触外壳130以及底座200。
71.弹性组件e的上弹性元件160以及下弹性元件170由弹性或具有延展性的材料制成,例如,金属。在本领域中,上弹性元件160以及下弹性元件170可能被称为“弹片”、“簧片”、“板簧片”等。上弹性元件160连接外壳130的一部分以及第一承载座150的顶面,而下弹性元件170连接底座200的一部分以及第一承载座150的底面,以达到弹性地夹持第一承载
座150的作用。在第一活动部m1相对固定部i运动时,通过上弹性元件160以及下弹性元件170的弹性夹持,可限制第一承载座150的运动范围,避免光学系统100运动或受到外力冲击时,第一承载座150由于碰撞到外壳130或底座200而造成第一承载座150以及在其内的第一光学元件11损坏。
72.第一驱动组件d1的磁性元件180可为永久磁铁。磁性元件180大致上为长条状,设置于外壳130的内部。磁性元件180的位置对应线圈190的位置。线圈190大致上为椭圆形,但线圈190也可能具有其他形状。线圈190设置于第一承载座150。线圈190的绕线轴垂直于主轴1001。线圈190与磁性元件180之间会产生平行于第一光学元件11的第一光轴111的方向的磁力,驱动第一承载座150沿着平行于第一光轴111的方向运动,带动第一承载座150内的第一光学元件11沿着平行于第一光轴111的方向运动,以达到自动对焦。
73.值得注意的是,在一些其他实施例中,光学系统100可进一步包括一参考元件以及一感测元件(未图示)。参考元件邻近于第一承载座150设置,感测元件的位置对应于参考元件的位置。参考元件可为永久磁铁。感测元件可为巨磁阻(giant magneto resistance,gmr)感测元件或穿隧磁阻(tunneling magneto resistance,tmr)感测元件等。当第一承载座150移动时,邻近的参考元件亦随着第一承载座150移动,参考元件的磁场因而发生变化,通过感测元件感测参考元件的磁场变化,而可得知第一承载座150的位置,以调整第一承载座150的位置并精确控制第一承载座150。
74.第一电路组件c1的第一电路板140可为软性电路板(flexible printed circuit,fpc)或软硬复合板等。第一电路组件c1电性连接第一驱动组件d1。如图3所示,外罩110可包括一突出部1101,以与第一电路板140连接。
75.第二活动部m2的第二承载座250用以连接第二光学元件12。详细来说,第二光学元件12可设置于第二电路板260,而第二承载座250可连接第二电路板260。
76.第二驱动组件d2的活动板230通过偏压元件240连接至固定板220,且活动板230通过偏压元件240可相对固定板220运动。固定板220及/或活动板230可为多层板。值得注意的是,由于固定板220以及活动板230可产生相对运动,在一些其他实施例中,可能产生固定板220相对活动板230运动的情形。在这样的情形下,固定板220为活动的,而活动板230为固定的。也就是说,在此所使用的用语“固定板”以及“活动板”并不构成限制。
77.偏压元件240可具有形状记忆合金(shape memory alloys,sma)材料,例如,钛镍合金(tini)、钛钯合金(tipd)、钛镍铜合金(tinicu)、钛镍钯合金(tinipd)等。而且,可通过一电源对偏压元件240施加驱动信号(例如,电流)而改变偏压元件240的长度。又,可施加不同的驱动信号至偏压元件240,以独立地控制各个偏压元件240的长度变化。举例而言,当施加驱动信号至偏压元件240时,可使不同的偏压元件240产生相同或不相同的长度变化,并带动活动板230相对固定板220运动,进而带动第二承载座250以及第二光学元件12运动,包括平移、转动等。
78.虽然前面描述了第一驱动组件d1包括磁性元件、线圈,而第二驱动组件d2包括形状记忆合金的实施例,不过,第一驱动组件d1以及第二驱动组件d2的驱动方式不限于此。例如,在一些其他实施例中,第一驱动组件d1可包括滚珠、球体等。
79.第二电路组件c2的第二电路板260可为软性电路板或软硬复合板等。第二电路组件c2用以电性连接电子装置10。而且,第二驱动组件d2经由第二电路组件c2电性连接电子
装置10。也就是说,第二电路组件c2可称为光学系统100的一对外电路。
80.在本实施例中,定位组件p的定位元件210设置于第一驱动组件d1与第二活动部m2之间。不过,定位组件p的设置位置不限于此。定位元件210包括板状结构,包括一本体2101以及至少一移除部2102。移除部2102设置在本体2101。沿着主轴1001观察时,移除部2102与固定部i不重叠。在一些实施例中,定位组件p由可导电的材料制成,例如,金属。
81.在本公开中,定位组件p可协助第一光学元件11与第二光学元件12的主动对准制程。接下来,请参考图4以及图5,以了解如何进行第一光学元件11与第二光学元件12的主动对准制程。第一光学元件11与第二光学元件12的主动对准制程可大致上分为一第一组装步骤以及一第二组装步骤。第一组装步骤包括将第一光学元件11组装于光学系统100。第二组装步骤包括将第二光学元件12以及第二电路组件c2(对外电路)组装于光学系统100。图4是图2中的光学系统100在第一组装步骤时的状态的示意图。图5是图2中的光学系统100在第二组装步骤时的状态的示意图。在图4以及图5中,以相当概略的方式绘示各个元件、一组装设备300、一切割设备400。
82.在进行第一光学元件11与第二光学元件12的主动对准制程之前,需先组装光学系统100的至少部分,包括固定部i、第一活动部m1、第二活动部m2、定位组件p。例如,可先施加具有黏性的元件至固定部i、第一活动部m1、第二活动部m2、定位组件p之间。值得注意的是,在一些其他实施例中,如果光学系统100不需要感测器偏移的功能,则可省略第二活动部m2及/或第二驱动组件d2等。不过,即使光学系统100不需要感测器偏移的功能,仍可适用以下描述来完成第一光学元件11与第二光学元件12的主动对准制程。
83.在第一组装步骤时,定位组件p用以将第一活动部m1相对固定部i定位于一第一组装位置,并将第二活动部m2相对固定部i定位于一第二组装位置。详细来说,定位组件p用以将尚未安装第一光学元件11的第一承载座150相对底座200定位,并将尚未安装第二光学元件12的第二承载座250相对底座200定位。
84.定位元件210包括一组装定位部2103,用以对应组装设备300。详细来说,在第一组装步骤时,组装设备300直接接触组装定位部2103,故组装设备300可通过物理性地接触暂时固定第一活动部m1于第一组装位置,并固定第二活动部m2于第二组装位置。
85.在一些实施例中,定位元件210进一步包括一通电定位部2104,用以对应组装设备300的一电源。通电定位部2104电性连接光学系统100的其他元件,例如,第二驱动组件d2。组装设备300的电源用以对通电定位部2104通电,故与定位元件210电性连接的其他元件(例如,第二驱动组件d2)也被通电,并可用以在第一组装步骤暂时固定第一活动部m1于第一组装位置并固定第二活动部m2于第二组装位置。
86.当组装设备300通过定位元件210的通电定位部2104暂时固定第一活动部m1于第一组装位置并固定第二活动部m2于第二组装位置时,通电定位部2104直接接触组装设备300的至少部分。例如,通电定位部2104包括金属裸露部,用以对应组装设备300的一临时接脚。在一些实施例中,组装定位部2103与通电定位部2104为定位元件210上的相同部分。即,组装定位部2103与通电定位部2104一体成形。
87.在将第一活动部m1相对固定部i暂时固定于第一组装位置并将第二活动部m2相对固定部i暂时固定于第二组装位置之后,安装第一光学元件11至光学系统300,以完成第一组装步骤。
88.接下来,将第二光学元件12相对固定部i定位,使得第一光学元件11的第一光轴111与第二光学元件12的第二光轴121重合,以完成第二组装步骤。在一些实施例中,在第二组装步骤时,可视实际需求决定是否移除定位元件210的移除部2102。可通过雷射切割或人工移除等方式移除定位元件210的移除部2102。例如,可通过切割设备400来切割移除部2102。在一些实施例中,移除部2102在主轴1001的最大尺寸小于定位元件210的其余部分在主轴1001的最大尺寸,以利于移除移除部2102。即,移除部2102的厚度小于定位元件210的其余部分的厚度。
89.在第二组装步骤之后,移除组装设备300。接下来,即可将装设好第一光学元件11以及第二光学元件12的光学系统100安装至电子装置10。应理解的是,定位组件p包括用以电性连接组装设备300的回路(例如,通电定位部2104),但此回路大致上仅在主动对准制程发挥作用。当电子装置10输出一驱动信号至光学系统100时,驱动信号并不会经过定位组件p的回路的至少部分。例如,当电子装置10输出驱动信号至光学系统100时,驱动信号是通过第二电路组件c2输入第一驱动组件d1及/或第二驱动组件d2。
90.在前述的实施例中,定位组件p包括单独的定位元件210,不过,在一些其他实施例中,定位组件p可设置于其他元件内。例如,定位组件p可形成于固定部i、第一活动部m1、第二活动部m2、第二驱动组件d2等元件的至少其中一者。即,定位组件p可固定地连接固定部i、第一活动部m1、第二活动部m2、第二驱动组件d2等元件的至少其中一者。
91.例如,当第一承载座150或底座200或第二承载座250包括树脂材料时,定位组件p的至少部分可通过模内成形(insert molding)等方式形成于(例如,埋藏)第一承载座150或底座200或第二承载座250。或者,定位组件p的至少部分可通过贴合等方式形成于第二电路板260上。而且,定位组件p仍可包括组装定位部2103及/或通电定位部2104的功能。即,组装设备300仍可物理性地接触定位组件p及/或对定位组件p通电。组装定位部2103及/或通电定位部2104可固定地设置于固定部i、第一活动部m1、第二活动部m2、第二驱动组件d2、第二电路组件c2等。
92.在以下内容中,相同的元件将以相同的符号表示,类似的元件则以类似的符号表示,且相同的特征不再赘述。接下来,请参考图6至图8。图6是一些其他实施例中的一光学系统的一第二承载座250a的立体图。图7是又一些实施例中的一光学系统的一第二承载座250b的立体图。图8是图7中的光学系统在第一组装步骤时的示意图。在图8中,以相当概略的方式绘示各个元件以及一组装设备300b。
93.在图6所示的实施例中,一定位组件pa的至少部分形成于第二承载座250a,且包括类似于定位元件210的移除部2102的结构。在图7所示的实施例中,一定位组件pb的至少部分形成于第二承载座250b,且不包括类似于定位组件p的移除部2102的结构。因为图7所示的实施例中的定位组件pb不包括类似于定位元件210的移除部2102的结构,图8的组装设备300b可包括一接触部301b,用以接触定位组件pb。虽然在此仅示出定位组件形成于第二承载座的实施例,但定位组件也可形成于其他元件,且定位组件的形状以及结构不限于此。
94.图9是组装光学系统的一方法500的流程图。在步骤s01中,组装一光学系统的至少部分,包括一活动部(例如,前述实施例的第一活动部及/或第二活动部)、一固定部、一定位组件等。在步骤s02中,通过一组装设备接触定位组件,以暂时固定光学系统的至少部分。暂时固定可包括物理性地接触,例如,夹持。在一些实施例中,暂时固定可进一步包括通电,例
如,组装设备可包括一临时接脚,以对定位组件通电,并进一步控制光学系统的活动部相对固定部的位置。在步骤s03中,安装一第一光学元件、一第二光学元件、一对外电路,使得第一光学元件的一第一光轴与第二光学元件的一第二光轴重合,其中对外电路用以电性连接一电子装置。在步骤s04中,移除组装设备。除此之外,可根据实际需求决定是否移除定位组件的部分或整体。在完成组装之后,可将光学系统安装至电子装置。
95.综上所述,在进行第一光学元件与第二光学元件的主动对准制程时,通过组装设备物理性地接触及/或对定位组件通电,定位组件可暂时固定光学系统中连接第一光学元件的部分,并因此利于第二光学元件的主动对准。在一些其他实施例中,可先暂时固定光学系统中连接第二光学元件的部分,并由调整第一光学元件的位置来完成主动对准制程。除此之外,定位组件可为单独的元件或可形成于其他元件内。又,可根据实际需求,决定是否移除或裁切定位组件的一部分或整体。
96.前述内文概述了许多实施例的特征,使本技术领域中具有通常知识者可以从各个方面更佳地了解本公开。本技术领域中具有通常知识者应理解的是,可轻易地以本公开为基础来设计或修饰其他制程以及结构,并以此达到相同的目的及/或达到与在此介绍的实施例等相同的优点。本技术领域中具有通常知识者亦应理解的是,这些相等的结构并未背离本公开的精神与范围。在不脱离本公开的精神和范畴内,可作更动、替代与润饰。除此之外,本公开的保护范围并未局限于说明书内所述特定实施例,每一权利要求构成单独的实施例,且本公开的保护范围也包括各个权利要求及实施例的组合。