1.本技术涉及激光投影技术领域,特别涉及一种激光投影设备。
背景技术:
2.激光投影系统包括投影屏幕和激光投影设备,激光投影设备能够在投影屏幕上投射画面,以实现视频播放等功能。
3.该激光投影设备可以包括:光源、光学引擎和镜头。光学引擎可以将光源提供的照明光束进行调制。该镜头可以将光学引擎调制后的照明光束进行投射成像。该激光投射设备还可以包括:用于承载镜头的第一壳体,以及用于承载光学引擎的第二壳体。该第二壳体具有支撑面,第一壳体可以固定在第二壳体的支撑面上,以实现对镜头和光学引擎的装配。
4.为了提高激光投影设备所投射的画面的显示效果,需要提高镜头和光学引擎的装配精度,以保证光学引擎能够将照明光束精准的射入镜头。为此,需要保证镜头和光学引擎装配后两者之间的距离,与激光投影设备设计时两者之间的距离保持一致。但是,由于在第一壳体和第二壳体进行加工时,第一壳体与第二壳体存在加工误差,导致第一壳体与第二壳体连接后,镜头和光学引擎之间的距离与设计时的距离不同,进而导致激光投影设备所投射的画面的显示效果较差。
技术实现要素:
5.本技术实施例提供了一种激光投影设备。可以解决现有技术的激光投影设备所投射的画面的显示效果较差的问题,所述技术方案如下:
6.提供了一种激光投影设备,包括:
7.第一壳体,所述第一壳体用于承载镜头;
8.第二壳体,所述第二壳体用于承载光学引擎;
9.以及,位于所述第一壳体与所述第二壳体之间的位置调节组件,所述位置调节组件分别与所述第一壳体和所述第二壳体连接,所述位置调节组件被配置为:调节所述第一壳体与所述第二壳体之间的距离。
10.本技术实施例提供的技术方案带来的有益效果是:
11.该激光投影设备可以包括:第一壳体、第二壳体,以及位于第一壳体与第二壳体之间的位置调节组件。当第一壳体中的镜头与第二壳体中的光学引擎之间的装配精度不满足设计要求时,可以通过位置调节组件调整第一壳体与第二壳体之间的距离,以使第一壳体中的镜头与第二壳体中的光学引擎之间的距离,与激光投影设备设计时两者之间的距离相同,进而使保证光学引擎提供的照明光束可以精准的射入镜头,有效的提高了该激光投影设备所投射的画面的显示效果。并且,在对不满足装配精度的镜头和光学引擎进行修正时,无需将第一壳体从第二壳体上拆卸下来,有效的提高了对第一壳体中的镜头与第二壳体中的光学引擎之间的装配精度进行修正的效率。
附图说明
12.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
13.图1是本技术实施例提供的一种激光投影设备的结构示意图;
14.图2是本技术实施例提供的另一种激光投影设备的结构示意图;
15.图3是图2示出的激光投影设备的爆炸图;
16.图4是本技术实施例提供的一种活动连接件与第一壳体连接的示意图;
17.图5是本技术实施例提供的一种第二壳体的结构示意图;
18.图6是本技术实施例提供的一种活动连接件的结构示意图;
19.图7是本技术实施例提供的一种第二壳体上的支撑柱与活动连接件连接后的示意图;
20.图8是本技术实施例提供的一种激光投影系统的结构示意图。
具体实施方式
21.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术实施方式作进一步地详细描述。
22.在相关技术中,在激光投影设备中的第一壳体固定在第二壳体的支撑面上后,若由于第一壳体与第二壳体在加工时存在的加工误差,导致第一壳体中的镜头与第二壳体中的光学引擎之间的装配精度不满足设计要求,则会存在以下两种修正方式:
23.第一种修正方式,当第一壳体中的镜头与第二壳体中的光学引擎之间的距离,小于激光投影设备设计时两者之间的距离时,需要将第一壳体从第二壳体的支撑面上拆卸下来,并在第一壳体与第二壳体之间增加垫片后,重新将第一壳体安装在第二壳体的支撑面上,使得第一壳体中的镜头与第二壳体中的光学引擎之间的距离,与激光投影设备设计时两者之间的距离相同。
24.第二种修正方式,当第一壳体中的镜头与第二壳体中的光学引擎之间的距离,大于激光投影设备设计时两者之间的距离时,需要将第一壳体从第二壳体的支撑面上拆卸下来,并对第二壳体的支撑面重新进行机加工后,重新将第一壳体安装在第二壳体的支撑面上,使得第一壳体中的镜头与第二壳体中的光学引擎之间的距离,与激光投影设备设计时两者之间的距离相同。
25.相关技术中,当第一壳体中的镜头与第二壳体中的光学引擎之间的装配精度不满足设计要求时,在对其进行修正的过程中,需要将第一壳体从第二壳体上拆卸下来,导致对第一壳体中的镜头与第二壳体中的光学引擎之间的装配精度进行修正的效率较低。
26.请参考图1,图1是本技术实施例提供的一种激光投影设备的结构示意图。该激光投影设备00可以包括:
27.第一壳体100、第二壳体200和位置调节组件300。
28.该第一壳体100用于承载镜头,该第二壳体200用于承载光学引擎。该位置调节组件300可以位于第一壳体100与第二壳体200之间,且该位置调节组件分别与第一壳体100和
第二壳体200连接。
29.其中,该位置调节组件300被配置为:调节第一壳体100与第二壳体200之间的距离。
30.在本技术实施例中,第一壳体100可以通过位置调节组件300与第二壳体200连接,如此,可以实现第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配。若由于第一壳体100与第二壳体200在加工时存在的加工误差,导致第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度不满足设计要求,则本技术实施例可以通过以下两种修正方式进行修正:
31.第一种修正方式,当第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,小于激光投影设备00设计时两者之间的距离时,可以通过位置调节组件300将第一壳体100与第二壳体200之间的距离调大,使得第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,与激光投影设备00设计时两者之间的距离相同。
32.第二种修正方式,当第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,大于激光投影设备00设计时两者之间的距离时,可以通过位置调节组件300将第一壳体100与第二壳体200之间的距离调小,使得第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,与激光投影设备00设计时两者之间的距离相同。
33.在上述两种修正方式中,均无需将第一壳体100从第二壳体200上拆卸下来,便能够实现对第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度进行修正,有效的提高了对第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度进行修正的效率。
34.综上所述,本技术实施例提供的激光投影设备,包括:第一壳体、第二壳体,以及位于第一壳体与第二壳体之间的位置调节组件。当第一壳体中的镜头与第二壳体中的光学引擎之间的装配精度不满足设计要求时,可以通过位置调节组件调整第一壳体与第二壳体之间的距离,以使第一壳体中的镜头与第二壳体中的光学引擎之间的距离,与激光投影设备设计时两者之间的距离相同,进而使保证光学引擎提供的照明光束可以精准的射入镜头,有效的提高了该激光投影设备所投射的画面的显示效果。并且,在对不满足装配精度的镜头和光学引擎进行修正时,无需将第一壳体从第二壳体上拆卸下来,有效的提高了对第一壳体中的镜头与第二壳体中的光学引擎之间的装配精度进行修正的效率。
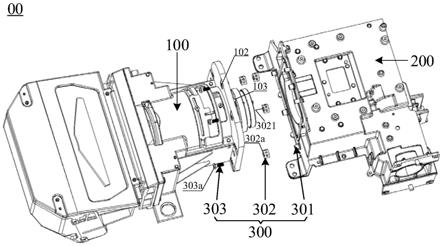
35.在本技术实施例中,如图2和3所示,图2是本技术实施例提供的另一种激光投影设备的结构示意图,图3是图2示出的激光投影设备的爆炸图。该激光投影设备00中的位置调节组件300可以包括:支撑柱301,以及与该支撑柱301连接的活动连接件302。
36.该支撑柱301可以位于第二壳体200上,且该支撑柱301可以与第二壳体200固定连接。
37.该活动连接件302具有支撑面302a。该活动连接件302的支撑面302a可以与第一壳体100连接。
38.在本技术实施例中,该活动连接件302被配置为:在支撑柱301上沿该支撑柱301的长度方向移动,以调整该活动连接件302的支撑面302a与第二壳体200之间的距离,从而可以实现对第一壳体100与第二壳体200之间的距离的调整。
39.示例的,位置调节组件300中的支撑柱301具有第一外螺纹,位置调节组件300中的
活动连接件302具有与该第一外螺纹配合的第一内螺纹。例如,该支撑柱301的形状可以为圆柱状,第一外螺纹可以位于支撑柱301的外壁上;该活动连接件302可以具有与该支撑柱301形状匹配的第一开孔3021,该第一内螺纹可以位于该第一开孔3021的内壁上。
40.该活动连接件302可以与支撑柱301螺纹连接。如此,当活动连接件302绕支撑柱301的轴心线转动时,该活动连接件302可以沿支撑柱301的长度方向移动。
41.需要说明的是,本技术中的支撑柱301的长度方向即为:位置调节组件300调节第一壳体100与第二壳体200之间的距离时,第一壳体100或第二壳体200所移动的方向。由于第一壳体100与第二壳体200之间的相对位置关系,通常需要在第二壳体200中的光学引擎出射的照明光束的光轴所在方向上进行调整,因此,该支撑柱301的长度方向需要平行于第二壳体200中的光学引擎出射的照明光束的光轴所在方向。通常情况下,第二壳体200中的光学引擎出射的照明光束的光轴所在方向,垂直于第二壳体200中与支撑柱301连接的一面,因此,该支撑柱301的长度方向也垂直于第二壳体200中与支撑柱301连接的一面。
42.在本技术实施例中,活动连接件302与第一壳体100之间的连接方式有多种,本技术实施例以以下两种可选的实现方式为例进行示意性的说明:
43.在第一种可选的实现方式中,如图4所示,图4是本技术实施例提供的一种活动连接件与第一壳体连接的示意图。该活动连接件302可以为圆柱状结构,该第一壳体100靠近第二壳体的一侧具有与该活动连接件302的形状匹配盲孔101。该活动连接件302可以位于该盲孔内,且可以通过旋转轴承a与第一壳体100连接。
44.例如,该旋转承载a具有内圈a1、外圈a2,以及位于内圈a1和外圈a2且用于连接该内圈a1和外圈a2的多个滚珠a3。该旋转轴承a的外圈a2可以与盲孔101的内壁固定连接,该旋转轴承的内圈a1可以与活动连接件302的外壁固定连接。由于旋转轴承a中的内圈a1和外圈a2之间可以通过位于二者之间的多个滚珠a3相对转动,因此,在活动连接件302与第一壳体100之间通过该旋转轴承a连接后,该活动连接件302能够在第一壳体100中的盲孔101内自由转动,但时,该活动连接件302在垂直于活动连接件302的转动面的方向上不会发生移动。
45.在本技术实施例中,活动连接件302的支撑面302a位于第一壳体100中的盲孔101内。在活动连接件302通过旋转轴承a与第一壳体100连接,且该活动连接件302与支撑柱301连接后,第一壳体100与第二壳体200之间即可实现连接。
46.在这种情况下,当第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度不满足设计要求时,对该第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度进行修正的方式如下:
47.若第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,小于激光投影设备00设计时两者之间的距离,操作人员可以操控位置调节组件300中的活动连接件302在支撑柱301上转动,使得该活动连接件302能够在该支撑柱301上沿远离第二壳体200的方向移动。如此,该活动连接件302即可带动第一壳体100沿远离第二壳体200的方向移动,以将第一壳体100与第二壳体200之间的距离调大,使得第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,与激光投影设备00设计时两者之间的距离相同,从而完成对第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度进行修正。
48.若第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,大于激光投影
设备00设计时两者之间的距离,操作人员可以操控位置调节组件300中的活动连接件302在支撑柱301上转动,使得该活动连接件302能够在该支撑柱301上沿靠近第二壳体200的方向移动。如此,该活动连接件302即可带动第一壳体100沿靠近第二壳体200的方向移动,以将第一壳体100与第二壳体200之间的距离调小,使得第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,与激光投影设备00设计时两者之间的距离相同,从而完成对第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度进行修正。
49.在第二种可选的实现方式中,如图2和3所示,激光投影设备00中的位置调节组件300还可以包括:紧固件303。激光投影设备00中的第一壳体100具有与该紧固件303配合的通孔102。该紧固件303的第一端具有用于与第一壳体100卡接的紧固片303a,该紧固件303的第二端能够穿过第一壳体100上的通孔102后与支撑柱301连接。
50.示例的,位置调节组件300中的紧固件302具有第二外螺纹,位置调节组件300中的支撑柱301具有与该第二外螺纹配合的第二内螺纹。例如,该紧固件302可以为螺钉;如图5所示,图5是本技术实施例提供的一种第二壳体的结构示意图,该第二壳体200上的支撑柱301可以具有与该紧固件302形状匹配的第二开孔301a,该第二内螺纹可以位于该第二开孔301a的内壁上。
51.该紧固件302可以与支撑柱301螺纹连接。如此,紧固件302可以通过螺纹连接的方式与支撑柱301紧固连接。
52.在本技术实施例中,活动连接件302的支撑面302a可以与第一壳体100抵接,在紧固件303与支撑柱301紧固连接后,第一壳体100与第二壳体200之间即可实现紧固连接。
53.需要说明的是,如图5所示,第二壳体200上的支撑柱301既具有外螺纹(也即第一外螺纹),也具有内螺纹(也即第二外螺纹),因此,该支撑柱301可以为圆筒状的结构,该支撑柱301的外螺纹可以分布在支撑柱301的外壁上,该支撑柱的内螺纹可以分布在支撑柱301的内壁上。
54.在这种情况下,当第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度不满足设计要求时,对该第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度进行修正的方式如下:
55.若第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,小于激光投影设备00设计时两者之间的距离,首先,操作人员可以将紧固件302拧松,并操控第一壳体100向远离第二壳体200的方向移动,使得第一壳体100与位置调节组件300中的活动连接件302之间存在一定的距离;之后,操作人员可以操控该活动连接件302在支撑柱301上转动,使得该活动连接件302能够在该支撑柱301上沿远离第二壳体200的方向移动;最后,操作人员可以拧紧紧固件302,使得第一壳体100与活动连接件302的支撑面302a抵接。如此,可以将第一壳体100与第二壳体200之间的距离调大,使得第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,与激光投影设备00设计时两者之间的距离相同,从而完成对第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度进行修正。
56.若第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,大于激光投影设备00设计时两者之间的距离,首先,操作人员可以将紧固件302拧松,并操控第一壳体100向远离第二壳体200的方向移动,使得第一壳体100与位置调节组件300中的活动连接件302之间存在一定的距离;之后,操作人员可以操控该活动连接件302在支撑柱301上转动,使得
该活动连接件302能够在该支撑柱301上沿靠近第二壳体200的方向移动;最后,操作人员可以拧紧紧固件302,使得第一壳体100与活动连接件302的支撑面302a抵接。如此,可以将第一壳体100与第二壳体200之间的距离调小,使得第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,与激光投影设备00设计时两者之间的距离相同,从而完成对第一壳体100中的镜头与第二壳体200中的光学引擎之间的装配精度进行修正。
57.对于上述两种可选的实现方式,其与相关技术相比还具有以下两个方面的优势:
58.第一方面,在相关技术中,当第一壳体中的镜头与第二壳体中的光学引擎之间的距离,小于激光投影设备设计时两者之间的距离时,需要将第一壳体从第二壳体上拆卸下来,并在第一壳体与第二壳体之间增加垫片后,重新将第一壳体安装在第二壳体上。由于第一壳体与第二壳体之间的垫片的厚度通常是固定的,因此,当需要增大第一壳体与第二壳体之间的距离时,仅能够保证第一壳体与第二壳体之间增大固定的距离,无法实现对第一壳体与第二壳体之间的距离进行连续的调节,导致对第一壳体与第二壳体之间的距离进行调节的精度较低。
59.而在上述两种可选的实现方式中,当第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,小于激光投影设备00设计时两者之间的距离时,无需将第一壳体100从第二壳体200上拆卸下来,仅需要让活动连接件302在支撑柱301上转动,使该活动连接件302能够在支撑柱301上沿远离第二壳体200的方向移动,即可将第一壳体100与第二壳体200之间的距离调大。由于活动连接件302能够移动至支撑柱301上的任一位置,因此,可以实现对该第一壳体100与第二壳体200之间的距离进行连续的调节,有效的提高了对该第一壳体100与第二壳体200之间的距离进行调节的精度。
60.第二方面,在相关技术中,当第一壳体中的镜头与第二壳体中的光学引擎之间的距离,大于激光投影设备设计时两者之间的距离时,需要将第一壳体从第二壳体上拆卸下来,并对第二壳体的支撑面重新进行机加工后,重新将第一壳体安装在第二壳体上。这样需要对第二壳体进行二次加工,导致激光投影设备的加工难度较大,且会导致对激光投影设备进行组装的效率较低。
61.而在上述两种可选的实现方式中,当第一壳体100中的镜头与第二壳体200中的光学引擎之间的距离,大于激光投影设备00设计时两者之间的距离时,无需将第一壳体100从第二壳体200上拆卸下来,仅需要让活动连接件302在支撑柱301上转动,使该活动连接件302能够在支撑柱301上沿靠近第二壳体200的方向移动,即可将第一壳体100与第二壳体200之间的距离调小。这样该第二壳体200仅需要进行一侧压铸成型即可,即使该第二壳体200存在加工误差,也无需度第二壳体200进行二次加工,有效的降低了激光投影设备00的加工难度较大,且提高了该激光投影设备00进行组装的效率。
62.在本技术实施例中,为了能够让操作人员更加方便的操控活动连接件302在支撑柱301上转动,如图6所示,图6是本技术实施例提供的一种活动连接件的结构示意图,该活动连接件302的形状可以为柱状,且该活动连接件302的侧壁上具有多个卡接孔3022。示例的,如图7所示,图7是本技术实施例提供的一种第二壳体上的支撑柱与活动连接件连接后的示意图,操作人员可以采用与该卡接孔3022卡接的专用工具(例如,l形扳手)操控该活动连接件3022在支撑柱301上转动。
63.可选的,如图6和图7所示,该活动连接件302的形状可以为六棱柱,该活动连接件
302的每个侧壁上具有一个卡接孔3022。如此,在活动连接件302在支撑柱301上转动的过程中,其转动至任一位置时,专用工具均可以插入活动连接件302中的卡接孔3022内,从而使得操作人员能够更加方便的操控活动连接件302在支撑柱301上转动。
64.在本技术实施例中,位置调节组件300中的活动连接件302的高度大于或等于支撑柱301的长度。其中,该活动连接件302的高度方向平行于支撑柱301的长度方向。如此,当活动连接件302中远离支撑面302a的一面与第二壳体200接触时,第一壳体100与第二壳体200之间的距离最小;对于上述第一种可选的实现方式,当活动连接件302中远离支撑面302a的一面与第二壳体200之间的距离达到极限距离时,第一壳体100与第二壳体200之间的距离最大,其中,该极限距离即为活动连接件302不从支撑柱301上脱落的最大距离;对于上述第二种可选的实现方式,当活动连接件302中远离支撑面302a的一面与支撑柱301远离第二壳体200的一面接触时,第一壳体100与第二壳体200之间的距离最大。
65.可选的,该激光投影设备00可以包括:多个支撑柱301、多个活动连接件302和多个紧固件303。其中,每个支撑柱301分别与对应的活动连接件302和对应的紧固件303连接。如此,通过该多个支撑柱301、多个活动连接件302和多个紧固件303,可以有效的提高对第一壳体100与第二壳体200之间的距离进行调节时的稳定性。
66.在本技术实施例中,如图3、图5和图7所示,第一壳体100上具有至少一个定位柱103,第二壳体200上具有与该至少一个定位柱103一一对应的至少一个定位孔201。其中,每个定位柱103的第一端位于对应的对位孔201内。通过该定位柱103与对位孔201的配合,能够将第一壳体100与在第二壳体200件装配的过程中,可以保证第一壳体100不存第二壳体200上脱落,如此,可以方便后续将第一壳体100固定在第二壳体200上。
67.可选的,本技术实施例中的激光投影设备还可以包括:光源组件、位于第二壳体200内的光学引擎,以及位于第一壳体100内的镜头。
68.示例的,该光源可以包括:激光器、荧光轮、滤色轮和反射组件等。该激光器可以为蓝色激光器。该蓝色激光器发射蓝光后,通过荧光轮产生红光和绿光,之后,该蓝光、红光以及绿光可以通过滤色轮之后,经过反射组件反射至光学引擎。
69.该光学引擎包括:光调整组件、棱镜组件以及数字微镜装置(英文:digital micromirror device;简称:dmd)光阀等。该光调节组件可以接收光源组件提供的照明光束,并将该照明光束入射至棱镜组件;该棱镜组件可以接收从光调整组件射出的照明光束,并将该光调整组件射出的照明光束经过两次反射后入射至dmd光阀的受光面;该dmd光阀可以基于图像信号对从棱镜组件射出的照明光束进行调制,并将调制后的照明光束反射至镜头。
70.该镜头可以包括:多个镜片组,每个镜片组均可以是由凸透镜和凹透镜等镜片构成的。通过该多个镜片组可以将经过光学引擎中的dmd光阀反射的照明光束投射成像。
71.综上所述,本技术实施例提供的激光投影设备,包括:第一壳体、第二壳体,以及位于第一壳体与第二壳体之间的位置调节组件。当第一壳体中的镜头与第二壳体中的光学引擎之间的装配精度不满足设计要求时,可以通过位置调节组件调整第一壳体与第二壳体之间的距离,以使第一壳体中的镜头与第二壳体中的光学引擎之间的距离,与激光投影设备设计时两者之间的距离相同,进而使保证光学引擎提供的照明光束可以精准的射入镜头,有效的提高了该激光投影设备所投射的画面的显示效果。并且,在对不满足装配精度的镜
头和光学引擎进行修正时,无需将第一壳体从第二壳体上拆卸下来,有效的提高了对第一壳体中的镜头与第二壳体中的光学引擎之间的装配精度进行修正的效率。
72.本技术实施例还提供了一种激光投影系统,如图8所示,图8是本技术实施例提供的一种激光投影系统的结构示意图。该激光投影系统可以包括:激光投影设备00和投影屏幕01。该激光投射设备00可以为上述实施例示出的激光投射设备。该激光投影设备00可以斜向上的发射光线,以使激光投影设备001可以向投影屏幕01投射画面。
73.在本技术中,术语“第一”和“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。术语“多个”指两个或两个以上,除非另有明确的限定。
74.以上所述仅为本技术的可选的实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。