1.本发明涉及一种食品机械设备自动化领域,尤其是涉及食品自动化制作设备中的制品自动摆盘技术。
背景技术:
2.面包等未熟食品在前加工生产完成后,需要一个个摆放于托盘中,再一起放置于蒸炉作蒸加工,然而以往的摆盘设备都是在机器的前面与后面各需一个操作人员操作,不但人员成本高,而且操作吃力,对生产效率的提高是一大难题。
技术实现要素:
3.为了解决上述问题,本发明提供了一种前置式摆盘机,可以有效减少操作人员,降低劳动强度,该发明提供的发明内容如下:
4.一种前置式摆盘机,其包括机壳,机壳的底部设有底架,机壳左右侧分别设有托盘升降装置,机壳的左右侧之间是空位,且前后贯通,空间用于放置托盘,空的托盘平放于托盘架上,底架上设有第一输送带装置,第一输送带装置的上部设有面团输送装置,所述面团输送带装置的上部设有抓取机械手装置,所述抓取机械手装置的一侧与机械手驱动组件相联接,机壳前部设有操作面板,面团作摆盘、放置托盘入托盘架与设定操作面板都同在前端方向。
5.进一步的,托盘升降装置设有输送链条,输送链条与托盘架相固定,输送链条与第一齿轮相联接,所述第一齿轮与电机轴相联接,电机启动后带动第一齿轮旋转,同时带动链条与托盘架作升降动作。
6.进一步的,第一输送带装置的运行方向是从后至前,与面团输送带的运行方向成直角关系,第一输送带装置的机架上设置有第一托盘感应装置和第二托盘感应装置,还设有定位片,定位片与第一输送链条相固定。
7.进一步的,面团输送装置设置有至少一个以上面团感应器,所述面团感应器以红外线扫描方式对面团作扫描并将信号传输于线路板的中央处理器,中央处理器对信号作计算后作出机器运行方式的指令。
8.进一步的,抓取机械手装置的长度超过托盘的宽度,并延伸至机壳的边侧位,机械手驱动组件分抓取手运动结构和摆盘运行结构,其抓取手运动结构由传动机构带动拉线,拉线再拉动机械手齿轮,拉伸弹簧随滑杆装置左右运动来控制手夹的张合动作,机械手取料与摆盘的运行动作由滑杆装置前后滑动运行而实现。
9.进一步的,操作面板可对面团输送速度与面团的摆位距及数量等各种参数作设置。
10.进一步的,面团摆盘完成后,托盘即可放入下一个流程的设备中作进一步加工。
11.进一步的,机壳的一侧设置有电控组件盒,电控组件盒内部设置有电控组件,电控组件与各驱动电机及操作显示屏作电性联接。
12.进一步的,机壳的底架上装置有带轮底脚和支撑脚,作支撑与滑行作用,当需要移动时则将支撑脚缩短,方便轮作滑行,当需要固定时,则将轮转成横向作止滑,再将支撑脚放长,支撑住机器。
13.运用上述之发明方案可以实现一人操作该摆盘机,当面团从输送带送入机械手位置时,机械手抓取面团摆放于托盘中,当摆满后,操作员即可将托盘放入下一个流程的设备中作进一步加工,操作员也能将空托盘从操作面板方向放入托盘架上,操作员还可以方便地对操作面板进行参数设置,解决了以往摆盘机需要二人操作的复杂方式,所有操作都能在机器前端进行,降低了人力成本。
附图说明
14.下面结合附图和本发明的实施方式对本发明作进一步详细的说明。
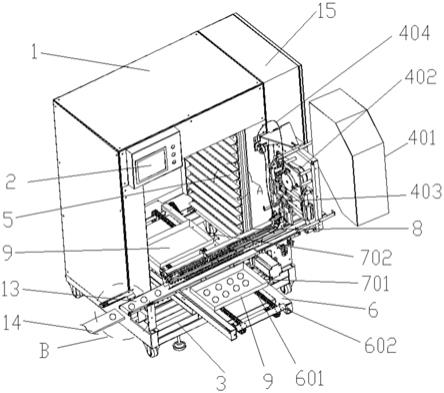
15.图1示出了本发明的整体立体示意图。
16.图2示出了本发明移开驱动机构外罩后的整体立体示意图。
17.图3示出了本发明的升降装置剖视图。
18.图4示出了本发明的升降装置中驱动部分放大视图。
19.图5示出了本发明的升降装置中托架部分放大视图。
20.图6示出了本发明的面团扫描器放大图。
21.图7示出了本发明的机械手运行原理示意图。
具体实施方式
22.本发明的实施例,提供了一种前置式摆盘机,其包括机壳1,机壳1的底部设有底架3,机壳1的左右侧分别设有托盘升降装置5,机壳1的左右侧之间是空位,且前后贯通,当托盘9是空的时,托盘9放置于托盘架502上,底架3上固定有第一输送带装置6,第一输送带装置6的上部设有面团输送装置13,所述面团输送带装置13的上部设有抓取机械手装置8,所述抓取机械手装置8的一侧与机械手驱动组件4相联接,机壳1前部设有操作面板2,面团11作摆盘、放置托盘9入托盘架502与设定操作面板2都在同一方向,当操作该摆盘机时,人站在操作面板前作好参数设置,再启动电源后,托盘升降装置5向下运行,将托盘下降到第一输送带装置6的链条上,当第二托盘感应装置702感应到托盘时,托盘升降装置5停止工作,第一输送带装置6启动,并向操作面板2方向移动,托盘在链条上相应移动,并停止在机械手放置面团的设定位置,当机械手摆放完面团,操作员即可将托盘放入下一个流程。
23.托盘升降装置5设有输送链条501,输送链条501与托盘架502相固定,输送链条与第一齿轮503相联接,所述第一齿轮503与电机轴相联接,电机启动后带动齿轮旋转,同时带动链条与托盘架作升降动作。
24.第一输送带装置6的运行方向是从后至前,与面团输送带的运行方向成垂直型,第一输送带装置6的机架602上设置有第一托盘感应装置701,当第一托盘感应装置701感应到托盘时,第一输送带装置6停止运行,托盘位置即为可接受机械手放置面团的位置,第一输送带装置6还设有防滑定位片601,防滑定位片 601与第一输送链条603相固定,起到对托盘限位的作用。
25.面团输送装置13设置有至少一个以上面团感应器12,所述面团感应器12 以红外
线方式对面团作扫描并将信号传输于线路板的中央处理器,中央处理器对信号作计算后作出机器运行方式的指令。
26.抓取机械手装置8的长度超过托盘9的宽度,并延伸至机壳1的边侧位,机械手驱动组件4分抓取手运动结构和摆盘运行结构,其抓取手运动结构由电机带动驱动轮组件405,驱动轮组件405中包含皮带件402,驱动轮组件405带动凸轮406作旋转,凸轮406的凸面与轴承410相磨擦,轴承410再带动摆臂407 作摆动,摆臂407与拉线404相联,摆臂407带动拉线404作运动,拉线404 再拉动机械手齿轮作运行,拉伸弹簧408随滑杆装置403左右运动来控制手夹 801的张合动作,机械手取料与摆盘的运行动作由滑杆装置403前后滑动运行而实现,机械手驱动组件4的外部是一个外壳401。
27.操作面板2可对面团输送速度、面团的每排距离、数量等各种参数作设置,当设置完成后,信号传送至电路板的中央处理器,中央处理器再发出信号控制各运动部件的运行,以及电源供应的启停。
28.面团11摆盘完成后,托盘9放入下一流程,空托盘放置于托盘架502上,托盘架502有多层。
29.机壳1的一侧设置有电控组件盒15,电控组件盒15内部设置有电控组件,电控组件与各驱动电机及操作显示屏作电联接。
30.机壳1的底架上设置有轮脚16和支撑脚17,作支撑与移动滑行作用。以上所述仅为本发明的优选实施例而已,并不用于限制本发明,例如在面团扫描装置上可不限于一个扫描器,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。