1.本实用新型涉及公路修缮技术领域,尤其涉及一种基于钢筋混凝土制公路用整平装置。
背景技术:
2.道路养护随着等级的提高、交通量大量增加和材料价格的增长,养护费用大量用于路面上,因此路面养护占重要地位,养护工作内容随路面的种类不同而异:对于低级的砂砾、碎石路面,主要是平整度和路拱的维持、磨耗层的刮扫和材料的补充;对于低级沥青路面如沥青表面处治等,主要是补坑、封面、松散材料的重拌或重铺等;对于高级路面如沥青混凝土路面则有坑洞裂缝的挖补、表面的封层及防滑措施等;水泥混凝土路面,主要是接缝的填封、板底掏空的填实和局部板体的更换等,路面养护工作的特点是量小而分散,因此所需材料的加工和处理要取用方便,施工工具要小巧灵活,最好一机多用,噪声要低,施工方法要快速安全不影响或少影响交通,施工标志要昼夜鲜明,防护要周到,以免发生交通事故。
3.目前市场上已有的整平装置大多为多轴棍滚压式整平机和桥架式振动整平机,他们采用的技术一般都是直接用自身的重量来挤压路面,这种技术路面整平效率低,需重复多次整平。为此,我们提出一种基于钢筋混凝土制公路用整平装置。
技术实现要素:
4.本实用新型主要是解决上述现有技术所存在的技术问题,提供一种基于钢筋混凝土制公路用整平装置。
5.为了实现上述目的,本实用新型采用了如下技术方案,一种基于钢筋混凝土制公路用整平装置,包括机身、两组把手、整平电机以及两组红外距离检测器,整平电机的输出端固定安装有驱动轴,驱动轴贯穿了机身的侧壁位于机身的内部,驱动轴上固定安装有驱动块,驱动块为三角柱状结构,驱动块的底部设置有压平块,压平块为矩形结构,且压平块的底部贯穿了机身的底部壁面,机身内部的前后两侧均开设有位移槽,压平块的前后两侧壁面对应位移槽的位置固定安装有与位移槽活动连接的滑块,滑块的顶部壁面固定安装有与机身内部的顶部壁面固定连接的拉簧。
6.作为优选,所述把手为c形结构的矩形块,两组把手分别固定安装在机身的左右两侧壁面上方,整平电机固定安装在机身的左侧壁面。
7.作为优选,两组所述红外距离检测器对称固定安装在机身的后侧壁面,且两组红外距离检测器的安装高度一致。
8.作为优选,所述机身的底部壁面左右两侧均固定安装有连接块,两组连接块的底部壁面前后两侧均固定安装有安装块。
9.作为优选,所述安装块的内部活动安装有可旋转的转轴,转轴为圆柱形结构,转轴上套接有可随转轴旋转的滑轮。
10.有益效果
11.本实用新型提供了一种基于钢筋混凝土制公路用整平装置。具备以下有益效果:
12.(1)该基于钢筋混凝土制公路用整平装置,操作人员握住两组把手带动整个装置在需要整平的路上移动,移动的同时启动整平电机,整平电机使得驱动轴旋转,由于驱动块是安装在驱动轴上的,所以驱动轴的旋转会带动驱动块移动旋转,而压平块位于驱动块的下方,由于驱动块的特殊结构,当驱动块旋转时驱动块的三个棱角会不停地向下挤压压平块,压平块收到挤压会带动滑块在位移槽内向下移动,由于滑块的顶部固定安装有与机身连接的拉簧,拉簧受到滑块向下的拉力以后因为拉簧的特性又会将滑块向上拉起,当驱动块旋转至顶部壁面与压平块的顶部壁面重合时,压平块向上移动至最高处,当驱动块旋转至其中一个棱角与压平块的顶部壁面垂直时,压平块向下移动至最低处,此时拉簧的拉力也为最大,通过驱动块与压平块之间的循环往复的运动可使得整个装置在前行的过程中使得压平块不断的向下挤压路面,使得路面收到地力不止为压平块自身的重力,还有驱动块对压平块挤压地力一同被传导到路面上,相比于传统的直接用自身的重量来挤压路面,提高了对路面挤压地力从而达到了增强整平的效果。
13.(2)该基于钢筋混凝土制公路用整平装置,由于机身的后侧壁面固定安装有两组红外距离检测器,红外距离检测器底部的输出端可发射出一束红外线光束,这束红外线光束可测量红外距离检测器与地面之间的距离,当两组红外距离检测器所测得的数据一致时,说明路面已被整平,当两组红外距离检测器所测得数据不一致时,说明此时的路面整平效果不佳,达到了在整平后对路面进行测试的效果。
附图说明
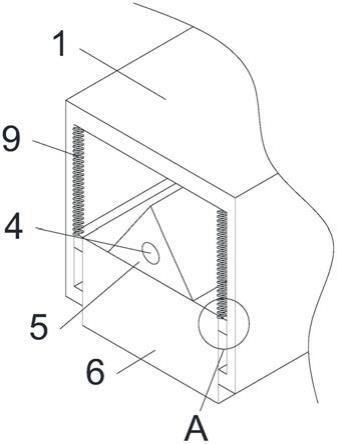
14.图1为本实用新型主要结构示意图;
15.图2为本实用新型内部结构部分剖视图;
16.图3为本实用新型图2中a处放大图。
17.图例说明:
18.1、机身;2、把手;3、整平电机;4、驱动轴;5、驱动块;6、压平块;7、位移槽;8、滑块;9、拉簧;10、连接块;11、安装块;12、转轴;13、滑轮;14、红外距离检测器。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.实施例:如图1-图3所示,一种基于钢筋混凝土制公路用整平装置,包括机身1、两组把手2、整平电机3以及两组红外距离检测器14,机身1为空心矩形结构,把手2为c形结构的矩形块,两组把手2分别固定安装在机身1的左右两侧壁面上方,整平电机3固定安装在机身1的左侧壁面,两组红外距离检测器14对称固定安装在机身1的后侧壁面,且两组红外距离检测器14的安装高度一致,整平电机3的输出端固定安装有驱动轴4,驱动轴4为圆柱形结构,驱动轴4贯穿了机身1的侧壁位于机身1的内部,驱动轴4上固定安装有驱动块5,驱动块5
为三角柱状结构,驱动块5的底部设置有压平块6,压平块6为矩形结构,且压平块6的底部贯穿了机身1的底部壁面,机身1内部的前后两侧均开设有位移槽7,位移槽7为矩形结构的槽,压平块6的前后两侧壁面对应位移槽7的位置固定安装有滑块8,滑块8为矩形结构的块,两组滑块8均与位移槽7活动连接,滑块8的顶部壁面固定安装有拉簧9,拉簧9的顶端与机身1内部的顶部壁面固定连接,机身1的底部壁面左右两侧均固定安装有连接块10,连接块10为矩形结构的块,两组连接块10的底部壁面前后两侧均固定安装有安装块11,安装块11为c形结构的矩形块,安装块11的内部活动安装有可旋转的转轴12,转轴12为圆柱形结构,转轴12上套接有可随转轴12旋转的滑轮13,滑轮13为圆环形结构。
21.本实用新型的工作原理:
22.在使用时,操作人员握住两组把手2带动整个装置在需要整平的路上移动,移动的同时启动整平电机3,整平电机3使得驱动轴4旋转,由于驱动块5是安装在驱动轴4上的,所以驱动轴4的旋转会带动驱动块5移动旋转,而压平块6位于驱动块5的下方,由于驱动块5的特殊结构,当驱动块5旋转时驱动块5的三个棱角会不停地向下挤压压平块6,压平块6受到挤压会带动滑块8在位移槽7内向下移动,由于滑块8的顶部固定安装有与机身1连接的拉簧9,拉簧9受到滑块8向下的拉力以后因为拉簧9的特性又会将滑块8向上拉起,当驱动块5旋转至顶部壁面与压平块6的顶部壁面重合时,压平块6向上移动至最高处,当驱动块5旋转至其中一个棱角与压平块6的顶部壁面垂直时,压平块6向下移动至最低处,此时拉簧9的拉力也为最大,通过驱动块5与压平块6之间的循环往复的运动可使得整个装置在前行的过程中使得压平块6不断的向下挤压路面,使得路面收到地力不止为压平块6自身的重力,还有驱动块5对压平块6挤压地力一同被传导到路面上,相比于传统的直接用自身的重量来挤压路面,提高了对路面挤压地力从而达到了增强整平的效果。
23.由于机身1的后侧壁面固定安装有两组红外距离检测器14,红外距离检测器14底部的输出端可发射出一束红外线光束,这束红外线光束可测量红外距离检测器14与地面之间的距离,当两组红外距离检测器14所测得的数据一致时,说明路面已被整平,当两组红外距离检测器14所测得数据不一致时,说明此时的路面整平效果不佳,达到了在整平后对路面进行测试的效果。
24.最后,应当指出,以上实施例仅是本实用新型较有代表性的例子。显然,本实用新型不限于上述实施例,还可以有许多变形。凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均应认为属于本实用新型的保护范围。