1.本实用新型涉及机器人领域,具体涉及一种旋转机构。
背景技术:
2.随着工业机器人技术的快速发展,工业机器人已应用于制造业的各个方面, 在机器人末端安装不同的执行器可以使机器人实现不同的功能,因此,末端执行器的设计是机器人应用的关键。
3.在许多工艺动作中,通常需要机构旋转一定角度,并检测是否动作到位,再进行下一步工艺动作。
技术实现要素:
4.本实用新型所要解决的技术问题,就在于提供一种旋转机构,适用于工业机器人的末端执行器进行90
°
旋转的工作场合,且能够自行判断运动是否到位。
5.为解决上述技术问题,本实用新型采用了以下技术方案:
6.一种旋转机构,包括机构安装板、旋转气缸、旋转轴和旋转板,所述旋转气缸通过气缸连接板固定安装在所述机构安装板的中部,所述旋转气缸的两端设有输出轴,两条输出轴分别与机构安装板的两端对齐,所述输出轴与所述旋转轴连接,所述旋转轴远离输出轴的一端设置有轴承,所述机构安装板的两端安装有轴承安装板,所述轴承安装于所述轴承安装板上,所述旋转板固定连接在所述旋转轴上,随所述旋转轴的转动而摆动;
7.在所述轴承安装板上安装有用于判断旋转板是否运动到位的第一传感器和第二传感器,对应的,在所述旋转轴上安装有用于触发所述第一传感器和第二传感器的感应部件,所述第一传感器安装的位置对应所述旋转轴带动所述旋转板摆动到与地面平行处时所述感应部件的位置,所述第二传感器安装的位置对应所述旋转轴带动所述旋转板摆动到与地面垂直处时所述感应部件的位置。
8.进一步地,所述旋转轴与所述旋转板之间通过夹紧构件连接,所述夹紧构件包括夹紧检测块和夹紧块,所述夹紧检测块和夹紧块的一侧夹紧所述旋转轴并通过螺丝锁紧所述夹紧检测块和夹紧块,所述夹紧检测块和夹紧块的另一侧夹紧所述旋转板,所述旋转板、夹紧检测块和夹紧块三者之间通过螺丝串连锁紧固定。
9.更进一步地,所述感应部件为感应螺钉,所述感应螺钉螺接在所述夹紧检测块上。
10.优选的,所述旋转轴与所述旋转气缸的输出轴之间通过联轴器连接
11.与现有技术相比,本实用新型具有以下有益效果:
12.(1)本实用新型提供了一种旋转机构,主要针对现有工业机器人的末端执行器需要进行90
°
旋转的工作场合,本实用新型与现有的90
°
旋转机构相比结构更简单,并且在机构上还通过第一传感器和第二传感器来自动判断旋转机构的运动是否到位,确保机构运动控制的可靠性。
13.(2)旋转轴与旋转气缸输出轴之间通过联轴器连接,以及旋转轴与旋转板之间通
过夹紧检测块和夹紧块连接,能够方便随时对旋转轴和旋转板进行更换,也可根据不同的工作需求将旋转板和旋转轴更换为其他的工作部件。
附图说明
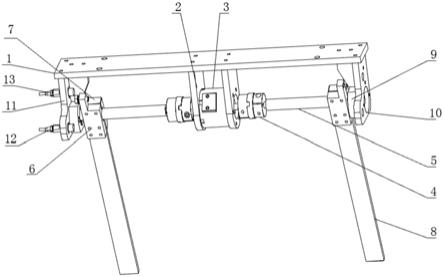
14.图1为本实用新型实施例的旋转机构的整体结构立体示意图;
15.图2为本实用新型实施例的旋转机构的正面示意图;
16.图3为本实用新型实施例的旋转机构的侧视图;
17.图4为本实用新型实施例的旋转机构的俯视图。
18.图中:1-机构安装板、2-气缸连接板、3-旋转气缸、4-联轴器、5-旋转轴、 6-夹紧检测块、7-夹紧块、8-旋转板、9-轴承、10-轴承安装板、11-感应螺钉、 12-第一传感器、13-第二传感器。
具体实施方式
19.下面将结合附图和实施例,详细说明本实用新型的技术方案,以便本领域普通技术人员更好地理解和实施本实用新型的技术方案。
20.本实用新型提供了如图1-4所示的一种旋转机构,包括机构安装板1、旋转气缸3、两条旋转轴5和两块旋转板8;机构安装板1可根据需要固定连接在工业机器人末端法兰盘上或者其他牢固的地方
21.旋转气缸3通过气缸连接板2固定安装在机构安装板1的中部,旋转气缸3 的两端均设有输出轴,旋转气缸3可实现90
°
的旋转,两端的输出轴可同步旋转90
°
,两条输出轴分别与机构安装板1的两端对齐,输出轴上连接有联轴器 4,联轴器4的另一端与旋转轴5连接,旋转轴5远离联轴器4的一端设置有轴承9,在机构安装板1的两端安装有轴承安装板10,轴承9安装于轴承安装板 10上;
22.两块旋转板8分别设置在旋转轴5的两端,旋转轴5与旋转板8之间通过夹紧构件连接,夹紧构件包括夹紧检测块6和夹紧块7,夹紧检测块6和夹紧块 7的一侧夹紧旋转轴5,为了确保受力稳定,旋转轴5在被夹紧检测块6和夹紧块7夹住的位置设置成平面状,并通过螺丝锁紧夹紧检测块6和夹紧块7;夹紧检测块6和夹紧块7的另一侧则夹紧旋转板8,为了进一步防止旋转板8脱落,旋转板8、夹紧检测块6和夹紧块7三者之间通过螺丝串连锁紧固定。
23.为了判断机构是否运行到位,在左侧的轴承安装板10上安装有第一传感器 12和第二传感器13,第一传感器12和第二传感器13可根据实际情况安装在左右任意一侧轴承安装板10上;对应的,在夹紧检测块6上安装有用于触发第一传感器12和第二传感器13的感应部件,该感应部件为一颗感应螺钉11,感应螺钉11螺接在夹紧检测块6远离旋转板8的一端,第一传感器12安装的位置对应旋转轴5带动旋转板8摆动到与地面平行处时感应螺钉11的位置,第二传感器13安装的位置对应旋转轴5带动旋转板8摆动到与地面垂直处时感应螺钉 11的位置,第一传感器12和第二传感器13可选用现有技术中的光电传感器或红外传感器。
24.上述实施例仅是本实用新型较优实施例,但并不能作为对实用新型的限制,任何基于本实用新型构思基础上作出的变型和改进,均应落入到本实用新型保护范围之内,具体保护范围以权利要求书记载为准。
技术特征:
1.一种旋转机构,其特征在于:包括机构安装板(1)、旋转气缸(3)、旋转轴(5)和旋转板(8),所述旋转气缸(3)通过气缸连接板(2)固定安装在所述机构安装板(1)的中部,所述旋转气缸(3)的两端设有输出轴,两条输出轴分别与机构安装板(1)的两端对齐,所述输出轴与所述旋转轴(5)连接,所述旋转轴(5)远离输出轴的一端设置有轴承(9),所述机构安装板(1)的两端安装有轴承安装板(10),所述轴承(9)安装于所述轴承安装板(10)上,所述旋转板(8)固定连接在所述旋转轴(5)上,随所述旋转轴(5)的转动而摆动;在所述轴承安装板(10)上安装有用于判断旋转板(8)是否运动到位的第一传感器(12)和第二传感器(13),对应的,在所述旋转轴(5)上安装有用于触发所述第一传感器(12)和第二传感器(13)的感应部件,所述第一传感器(12)安装的位置对应所述旋转轴(5)带动所述旋转板(8)摆动到与地面平行处时所述感应部件所在的位置,所述第二传感器(13)安装的位置对应所述旋转轴(5)带动所述旋转板(8)摆动到与地面垂直处时所述感应部件所在的位置。2.根据权利要求1所述的一种旋转机构,其特征在于:所述旋转轴(5)与所述旋转板(8)之间通过夹紧构件连接,所述夹紧构件包括夹紧检测块(6)和夹紧块(7),所述夹紧检测块(6)和夹紧块(7)的一侧夹紧所述旋转轴(5)并通过螺丝锁紧所述夹紧检测块(6)和夹紧块(7),所述夹紧检测块(6)和夹紧块(7)的另一侧夹紧所述旋转板(8),所述旋转板(8)、夹紧检测块(6)和夹紧块(7)三者之间通过螺丝串连锁紧固定。3.根据权利要求2所述的一种旋转机构,其特征在于:所述感应部件为感应螺钉(11),所述感应螺钉(11)螺接在所述夹紧检测块(6)上。4.根据权利要求1所述的一种旋转机构,其特征在于:所述旋转轴(5)与所述旋转气缸(3)的输出轴之间通过联轴器(4)连接。
技术总结
本实用新型公开了一种旋转机构,包括机构安装板、旋转气缸、旋转轴和旋转板,旋转气缸通过气缸连接板固定安装在机构安装板的中部,旋转气缸的两端设有输出轴,输出轴与旋转轴连接,旋转轴远离输出轴的一端设置有轴承,轴承安装于机构安装板两端的轴承安装板上,旋转板固定连接在旋转轴上;在轴承安装板上安装有第一传感器和第二传感器,在旋转轴上安装有触发第一传感器和第二传感器的感应部件。本实用新型主要针对现有工业机器人的末端执行器需要进行90
技术研发人员:刘文波 逄磊 张铂 姜贻樟
受保护的技术使用者:中国电器科学研究院股份有限公司
技术研发日:2021.07.07
技术公布日:2022/1/14